A New Approach To Estimate The Collision Probability For Automotive Applications
We revisit the computation of a probability of collision in the context of automotive collision avoidance (also referred to as conflict detection in other contexts). After reviewing existing approaches to the definition and computation of a collision probability we argue that the question “What is the probability of collision within the next three seconds?” can be answered on the basis of a collision probability rate. Using results on level crossings for vector stochastic processes we derive a general expression for the upper bound of the distribution of the collision probability rate. This expression is valid for arbitrary prediction models including process noise. We demonstrate in several examples that distributions obtained by large-scale Monte-Carlo simulations obey this bound and in many cases approximately saturate the bound. We derive an approximation for the distribution of the collision probability rate that can be computed on an embedded platform. An upper bound of the probability of collision is then obtained by one-dimensional numerical integration over the time period of interest. A straightforward application of this method applies to the collision of an extended object with a second point-like object. Using an abstraction of the second object by salient points of its boundary we propose an application of this method to two extended objects with arbitrary orientation. Finally, the distribution of the collision probability rate is compared to approximations of time-to-collision distributions for one-dimensional motions that have been obtained previously.
💡 Research Summary
The paper revisits the problem of quantifying collision risk for automotive collision‑avoidance systems and proposes a fundamentally different approach based on the concept of a collision probability rate. Traditional methods either compute an instantaneous spatial‑overlap probability or a time‑to‑collision (TTC) based probability. The former yields a probability at a single instant and cannot be integrated over a time interval without losing its probabilistic meaning; the latter relies on strong assumptions such as constant velocity and separable longitudinal and lateral motion. Both approaches therefore fail to provide a rigorous probability of collision over a finite horizon (e.g., “within the next three seconds”).
Altendorfer and Wilkmann instead model the collision event as a level‑crossing of a stochastic vector process across a smooth boundary surrounding the host vehicle. By invoking the theory of level crossings for multidimensional stochastic processes (Rice’s formula and its extensions by Belyaev‑Khasminskii), they define the collision probability rate λ(t)=dP⁺_C/dt, i.e., the intensity with which the target vehicle’s trajectory enters the host‑vehicle region at time t. An upper bound for λ(t) is derived in closed form for an arbitrary prediction model that may include process noise, time‑varying control inputs, and non‑linear dynamics. The key result (Equation 3) expresses the rate as the expected normal component of velocity evaluated on the boundary, integrated over the joint position‑velocity density p_t(x, y, ẋ, ẏ) with the constraint ẋ ≤ 0 (entry from outside).
To make the method practical for automotive ECUs, the authors assume a Gaussian state estimate (as produced by a Kalman filter or similar estimator) and marginalize the full state density to obtain a bivariate Gaussian over position and velocity. This yields a tractable analytical approximation for λ(t) that involves only matrix multiplications and one‑dimensional Gaussian integrals, allowing real‑time computation on embedded hardware.
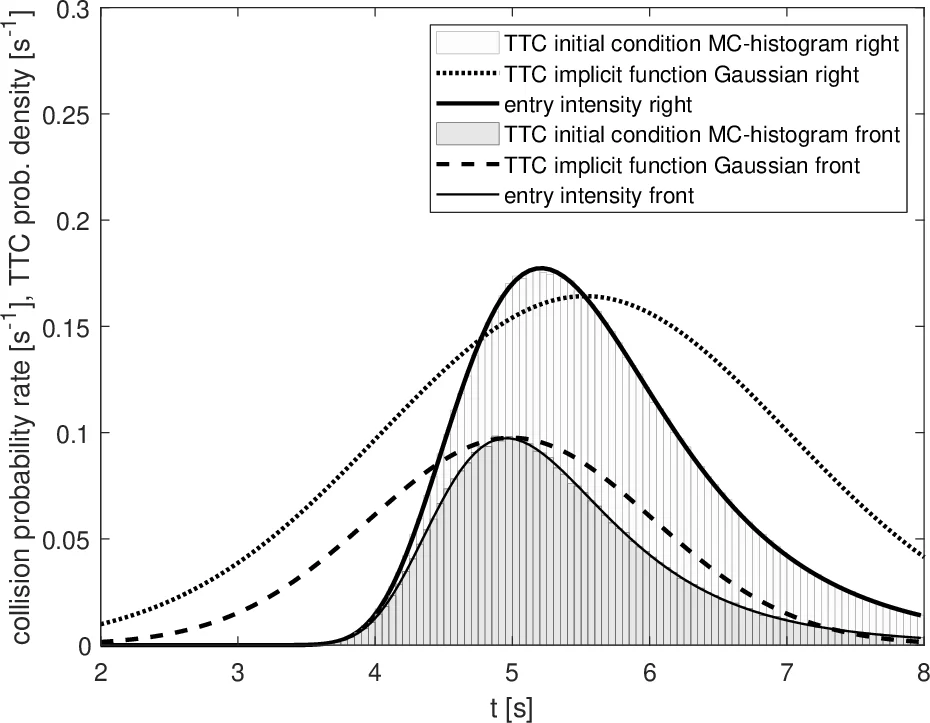
The theoretical development is validated through extensive Monte‑Carlo simulations (over one million sampled trajectories) covering a wide range of initial conditions, accelerations, decelerations, and process‑noise levels. Histograms of simulated collision times are compared with the analytically derived upper bound; the bound is shown to be tight, often saturated, confirming that the approximation does not underestimate risk.
The paper also extends the method to collisions between two extended objects with arbitrary orientation. The second object is abstracted by a set of salient points (e.g., vehicle corners). The collision probability rate for each point is computed independently, and the total rate is obtained by summation, providing an efficient way to handle complex geometries without resorting to full 3‑D integration.
Finally, the authors compare the collision probability rate distribution with previously published TTC‑based probability distributions for one‑dimensional motion. They demonstrate that TTC‑based methods can deviate by orders of magnitude when the constant‑velocity assumption is violated, whereas the probability‑rate approach remains accurate because it directly incorporates the full stochastic dynamics, including process noise and non‑linearities.
In summary, the contribution of the paper is threefold: (1) a rigorous definition of collision probability over a finite horizon via the collision probability rate derived from level‑crossing theory; (2) a closed‑form, computationally lightweight approximation suitable for real‑time automotive platforms; and (3) extensive validation and extension to multi‑point representations of extended bodies. This work provides a solid mathematical foundation for next‑generation collision‑avoidance systems that require reliable, horizon‑aware risk metrics, and it opens the door to integrating V2V communication, high‑definition maps, and advanced driver‑assistance algorithms within a unified probabilistic risk framework.
Comments & Academic Discussion
Loading comments...
Leave a Comment