Data-driven parameterization of the generalized Langevin equation
We present a data-driven approach to determine the memory kernel and random noise in generalized Langevin equations. To facilitate practical implementations, we parameterize the kernel function in the Laplace domain by a rational function, with coefficients directly linked to the equilibrium statistics of the coarse-grain variables. We show that such an approximation can be constructed to arbitrarily high order and the resulting generalized Langevin dynamics can be embedded in an extended stochastic model without explicit memory. We demonstrate how to introduce the stochastic noise so that the second fluctuation-dissipation theorem is exactly satisfied. Results from several numerical tests are presented to demonstrate the effectiveness of the proposed method.
💡 Research Summary
The paper introduces a data‑driven framework for constructing the memory kernel and stochastic forcing in generalized Langevin equations (GLEs) directly from equilibrium molecular dynamics (MD) trajectories. Recognizing that the Mori‑Zwanzig projection yields a formally exact GLE but that the memory kernel θ(t) is rarely available in a usable form, the authors propose to work in the Laplace domain. They define the Laplace transforms G(λ) and H(λ) of two correlation matrices that can be computed from simulation data, and show that G(λ)=−Θ(λ)H(λ), where Θ(λ) is the Laplace transform of the kernel. By evaluating Θ(λ) at the limits λ→∞ (high‑frequency) and λ→0 (low‑frequency) they obtain a set of moment‑matching conditions: Θ(∞)=−G(∞)H(∞)⁻¹, Θ(0)=0, Θ′(0)=−βg′(0), etc.
These constraints are used to fit a rational function approximation of Θ(λ):
Θ(λ)≈(I−λB₀−λ²B₁−…−λⁿB_{n−1})⁻¹(A₀+λA₁+…+λ^{n−1}A_{n−1})
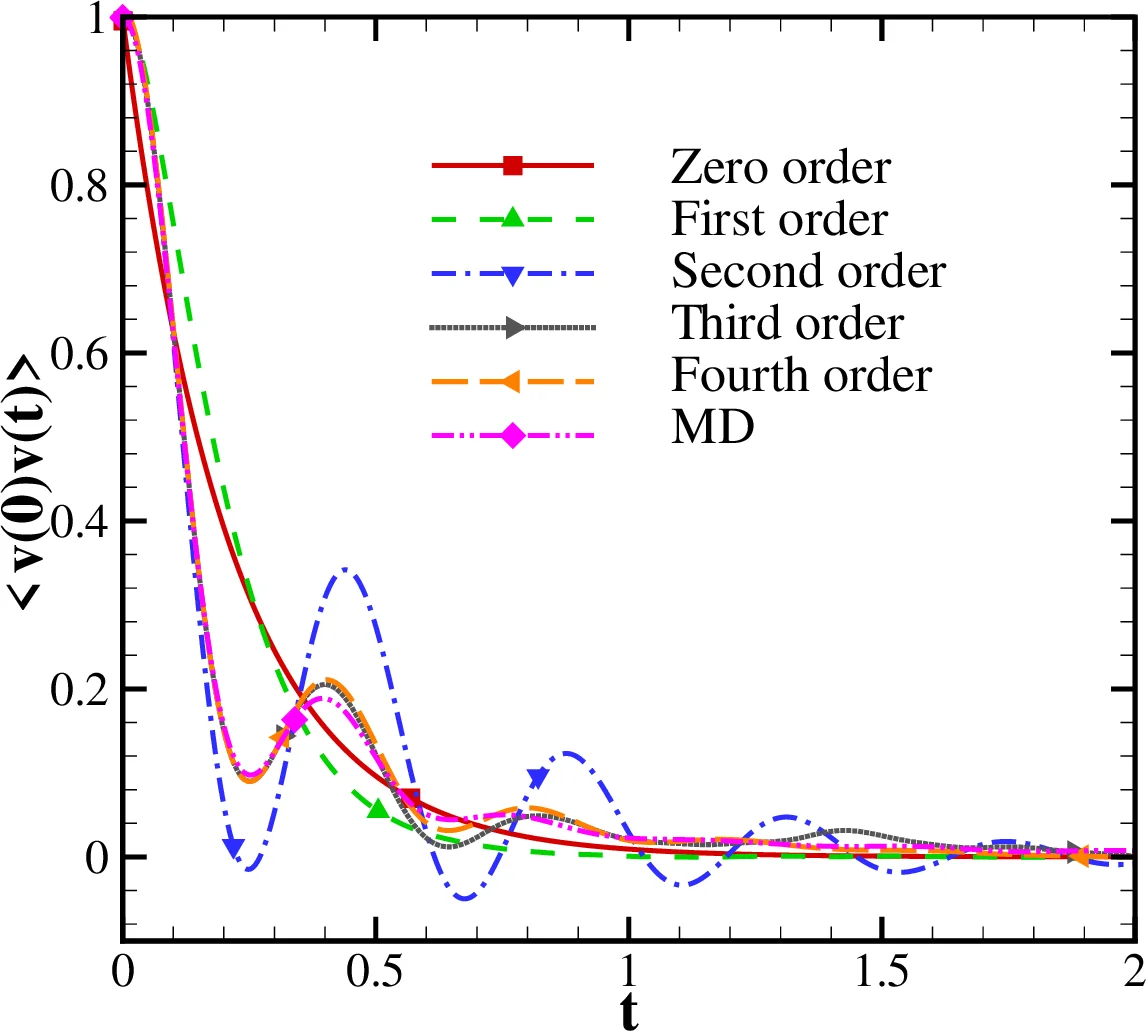
The coefficients {A_i, B_i} are obtained by solving a linear system that enforces the moment conditions. The order n can be increased arbitrarily, allowing the kernel to be approximated with any desired accuracy.
A key contribution is the conversion of the non‑Markovian GLE into an extended Markovian stochastic system by introducing auxiliary variables d(t). For the first‑order approximation (n=1) the extended dynamics read
\dot q = M⁻¹p, \dot p = F(q) + d, \dot d = B₀ d − A₀ v + W(t)
where v = M⁻¹p, and W(t) is a white Gaussian noise with covariance
⟨W(t)W(t′)ᵀ⟩ = −β⁻¹(B₀A₀ + A₀B₀ᵀ)δ(t−t′).
The initial condition for d is chosen as ⟨d(0)d(0)ᵀ⟩ = β⁻¹A₀, which guarantees that the joint invariant distribution
ρ(q,p,d) ∝ exp
Comments & Academic Discussion
Loading comments...
Leave a Comment