Ant-Inspired Density Estimation via Random Walks
Many ant species employ distributed population density estimation in applications ranging from quorum sensing [Pra05], to task allocation [Gor99], to appraisal of enemy colony strength [Ada90]. It has been shown that ants estimate density by tracking encounter rates – the higher the population density, the more often the ants bump into each other [Pra05,GPT93]. We study distributed density estimation from a theoretical perspective. We prove that a group of anonymous agents randomly walking on a grid are able to estimate their density within a small multiplicative error in few steps by measuring their rates of encounter with other agents. Despite dependencies inherent in the fact that nearby agents may collide repeatedly (and, worse, cannot recognize when this happens), our bound nearly matches what would be required to estimate density by independently sampling grid locations. From a biological perspective, our work helps shed light on how ants and other social insects can obtain relatively accurate density estimates via encounter rates. From a technical perspective, our analysis provides new tools for understanding complex dependencies in the collision probabilities of multiple random walks. We bound the strength of these dependencies using $local\ mixing\ properties$ of the underlying graph. Our results extend beyond the grid to more general graphs and we discuss applications to size estimation for social networks and density estimation for robot swarms.
💡 Research Summary
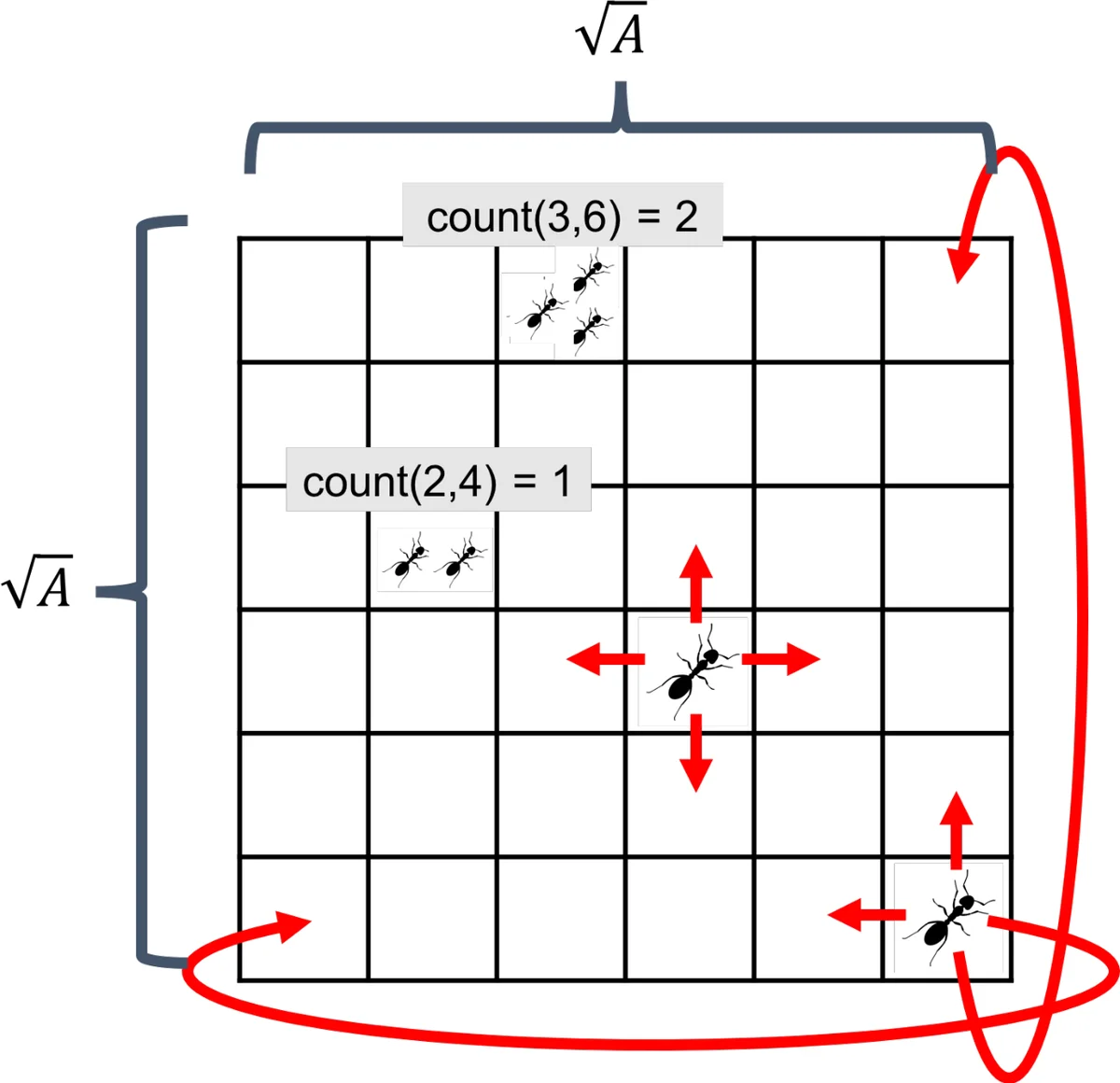
The paper investigates how a colony of ants—or, more abstractly, a set of anonymous agents—can estimate the global population density on a two‑dimensional grid using only local collision information. The authors model the environment as an A‑node torus (√A × √A) and place n + 1 agents uniformly at random. In each synchronous round every agent moves to one of its four neighboring cells (or stays still) with equal probability. A collision occurs when two agents occupy the same node at the end of a round; each agent can only count how many other agents share its node, without any further communication.
The central question is whether the empirical collision rate of a single agent provides a (1 ± ε) multiplicative estimate of the true density d = n/A with failure probability at most δ. On a complete graph the answer is trivial: each round yields an independent Bernoulli trial with success probability d, and a Chernoff bound gives O(log(1/δ)/ε²) rounds. The grid, however, mixes slowly; consecutive positions of an agent are highly correlated, and agents that start near each other tend to collide repeatedly, potentially biasing the estimator.
The key technical contribution is to show that despite these correlations the estimator remains accurate because the grid exhibits strong local mixing. Lemma 4 proves that the probability two independent random walks, starting from the same node, re‑collide after t steps decays as O(1/t). Using this bound the authors derive high‑order moment bounds for the number of collisions between any pair of agents (Lemma 11). Conditioned on the trajectory of a reference agent a, the collision counts with each of the other n agents become independent random variables, each with expectation t/A. Summing them yields the total collision count c, whose expectation equals dt, establishing unbiasedness (Lemma 2, Corollary 3).
To obtain high‑probability guarantees, the paper applies martingale concentration techniques together with the derived moment bounds. The result (Theorem 1) states that after
t = Θ( (log(1/δ)·
Comments & Academic Discussion
Loading comments...
Leave a Comment