Diversity-Integration Trade-offs in MIMO Detection
In this work, a MIMO detection problem is considered. At first, we derive the Generalized Likelihood Ratio Test (GLRT) for arbitrary transmitted signals and arbitrary time-correlation of the disturbance. Then, we investigate design criteria for the t…
Authors: Antonio De Maio, Marco Lops, Luca Venturino
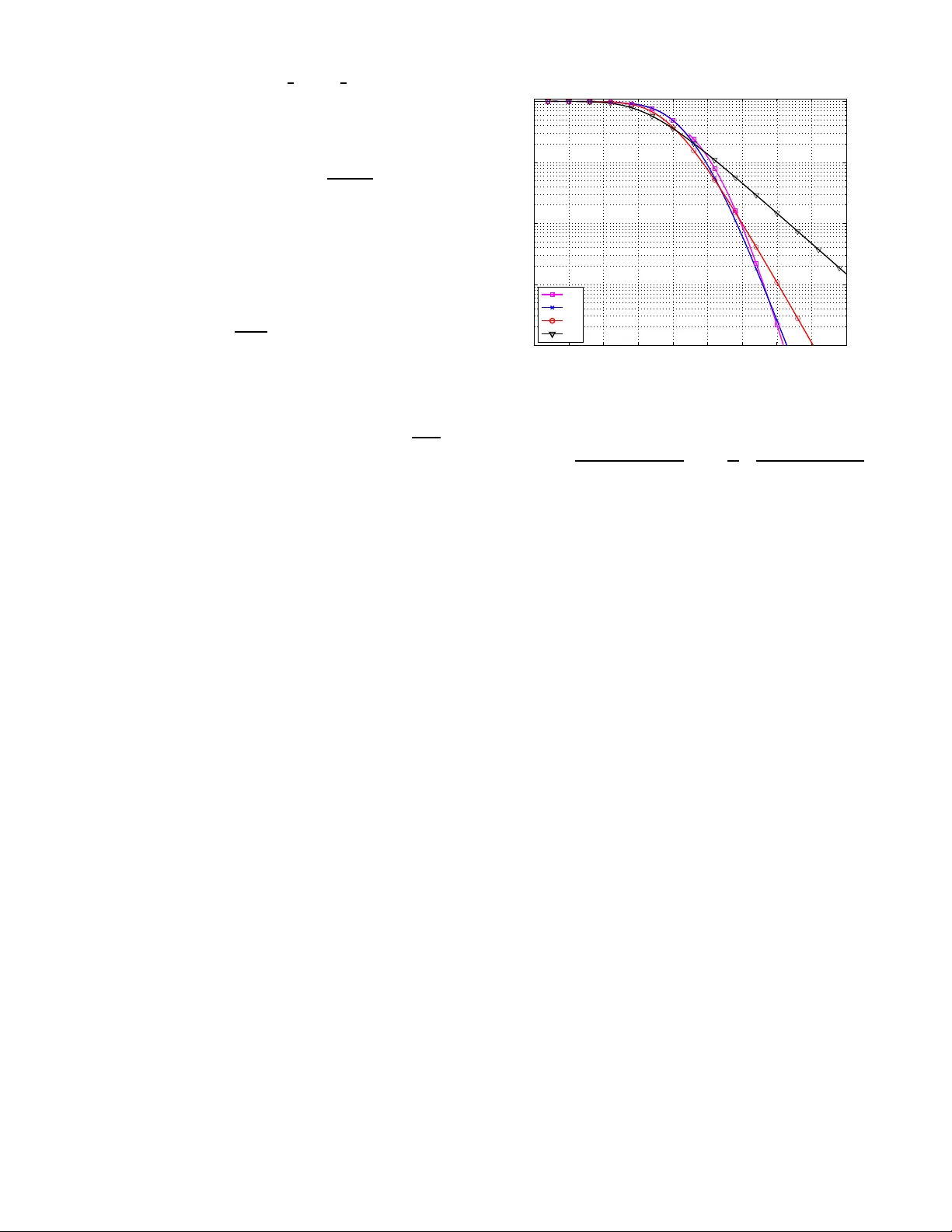
Di v ersity-Inte gration T ra de-of fs in MIMO Detecti on Antonio De Maio ∗ , Marco Lops † , and Luca V enturino † ∗ Universit ` a degli Studi di Nap oli “Federico II”, Napo li, IT AL Y – E-mail: ademaio @unina.it † Universit ` a degli Studi di Cassino, Cassino (FR), IT AL Y – E-mail: lo ps@unicas.it, l.venturino@unicas.it Abstract — In this work, a MIMO detection problem is con- sidered. At first, we d eriv e th e Generalized Likelihood Ratio T est (GLR T) for arbitrary transmitted signals and arbitrary time-correla tion of the disturban ce. T hen, we inves tigate design criteria for th e transmitted wav efo rms in both power -un limited and power -limited systems and we stud y the in terplay among the rank of the optimized code matrix, the n umber of transmit divers ity paths and the amount of energy in tegrated along each path. The results show that increasing the rank of the code matrix allows generating a larger number of diversity paths at the price of reducing th e a verage signal-to-clutter level along each path. I . I N T RO D U C T I O N W e consider a d etection system wherein both the recei ver and the transmitter, which are n ot necessarily co- located, are equippe d with multiple widely spaced antennas. The scenario is that typical o f a Multip le-Input Mu ltiple-Output (M IMO) rad ar architecture , as outlined in [1] a nd analyzed in [ 2], [3], but may also describe the tasks of a sensor network with widely spaced nodes, wherein both the tr ansmit and the receive array elem ents exhibit n o co herence. In this situation, the M IMO architecture can be ad vocated to improve the d etectability of targets with fluctuating radar cross section eithe r through an in crease o f the div ersity o rder [1], [2] or throu gh beam-f orming in the signal space [3] or through a co mbination of these two strategies: th e degree of freed om which allows jumping from one strategy to another is the structu re o f the tra nsmitted signals, and in particular the rank of the space- time code matrix u sed at the transmitter . In the ab ove context, this paper makes the following contri- butions. At the receiv er-design level, we first deriv e the Ge ner- alized Likelihood Ratio T est (GLR T) f or ar bitrary transmitted wa veforms and arbitr ary tim e-correlation of the disturb ance. Building upo n [2], [3], two design criteria for the space -time code are then presented and discussed. The figure of merit is the Mutual Inform ation (MI) [4] between the received signals and the chann el vectors generated by a prospec ti ve target, who se maximization is related to the ability to estimate unkn o wn characteristics of the ta rget as shown in [5] , an d also to the maximization of the detection probability ( P d ) for a fixed false alarm pro bability ( P f a ) as pointed ou t in [2], [3]. W e examine both the case o f p ower - unlimited systems, wherein a constraint is forced up on the received av erage signal-to-distu rbance ratio, and the case of po wer-limited systems, wherein the constraint is instead on the tr a nsmitted energy . Finally , closed-form formulas for P f a and P d are g i ven, showing that there is an inhere nt trade-off between num ber of div ersity p aths and amoun t o f energy integration along each path, which is a direct confirma- tion of the well-known fact that no unif ormly o ptimum (e.g., for any signal-to-disturb ance ratio) co ding strategy exists. The transmitting sensors recei ving sensors target ✛ clutter region 1 2 M 1 2 L Fig. 1. Considere d scenario. tool that can be u sed for trading di versity order for integration is the co de-matrix structure, and par ticularly its rank . This paper is organ ized as follows. In Section II, the pro blem under in vestigation is described. In Section III, the GLR T -based detector is der i ved. Finally , the diversity-integration trad e-offs for different code design criter ia are analyzed in Section IV. I I . P RO B L E M S T A T E M E N T Consider a detection architecture w here the transmitter and the receiver con sist o f M and L widely spaced antenn as, respectively , and are no t necessarily co-loca ted as depicted in Figure 1. W e assume the f ollowing general model f or the sign al transmitted by the m -th antenna (n ode) s m ( t ) = N X n =1 a n,m φ n ( t ) , 0 ≤ t ≤ T s , m = 1 , . . . , M , (1) where N is the signal-space dime nsion, { φ n ( t ) } N n =1 is an orthon ormal ba sis of the considered sign al space, a m = ( a 1 ,m , . . . , a N ,m ) T is the codeword associate d with the m − th transmitter, k a m k 2 is the energy transmitted by antenna m and T s is the time dur ation of the tran smitted signal. Sub sumed by the above model is the case of a pu lsed-MIMO radar, wherein φ n ( t ) = p ( t − ( n − 1) T ) , w ith p ( · ) a pu lse of duration T p ≤ T and T = T s / N th e pulse-rep etition time (PR T) [2]. The signal observed at the L recei ve nodes may co ntain or not th e echo of a target scattering located at a given distance. The bandwidth of the transmitted signal indu ces a p artition of the controlled area in a finite numb er of range cells, directly tied to the delay with which a target echo is hear d at the receiving nodes. Denoting by r ℓ ( t ) the signal received at the ℓ − th receive node at a gi ven delay τ 0 , we thus ha ve: r ℓ ( t ) = H 1 : M X m =1 N X n =1 a n,m φ n ( t − τ 0 ) α m,ℓ + w ℓ ( t ) H 0 : w ℓ ( t ) (2) for ℓ = 1 , . . . , L . In the above equ ation, wh ich subsum es the model outlined in [2 ], w ℓ ( t ) is a Gau ssian p rocess which models the overall disturb ance origina ting from the super- position of rece i ver no ise and spur ious scattering fr om the surroun ding en viron ment (denoted as clutter) which typ ically exhibits time corr elation. In writing d own (2), th e fo llo wing three assumptio ns ha ve been made. a) The transmitted signals are narrowband [1 ], namely all of the receiv e sensors see the target as belonging to the same range cell 1 . b) The spacin g of the an tennas at bo th the transmitter and the r ecei ver is wid e enoug h as to allow an gle diversity [1], [6], i.e., to gen erate different aspect angles which justifies the use of the LM different co upling coefficients α m,ℓ for m = 1 , . . . , M and ℓ = 1 , . . . , L . c) The target is either stationary or h as a kn o wn Doppler shift w hich is compe nsated for at the receiver [7]. In prin ciple, Analog-to- Digital (A/D) conversion would r e- quire und ertaking a K elly-Root expansion of the re cei ved (vector) sign al [8] , which would inevitably lead to an A/D stage d epending on the clutter covariance 2 . This would in turn lead to a hardly imp lementable receiver and would p re vent any subseq uent step towards adaptive systems, wherein such a covariance is assumed u nknown [ 3]. As a consequence, we adop t the cu stomary - albeit sub- optimum - appro ach of projecting the received o bservations on to the signal spac e, which yields the following b inary hypothesis testing prob lem: r ℓ = ( H 1 : Aα ℓ + w ℓ H 0 : w ℓ ℓ = 1 , . . . , L , (3) where α ℓ = ( α 1 ,ℓ , . . . , α M ,ℓ ) T is the M − dimen sional vecto r modeling the scatterin g o f the target - hit by the M transm itted wa veforms in (1) - towards the ℓ − th receive n ode for ℓ = 1 , . . . , L ; A = ( a 1 , . . . , a M ) is the N × M code matrix containing the N − dimensional c odew ord tr ansmitted by the m − th transmit nod e as its m − th co lumn; tr { AA H } is the total transmitted energy; finally , w ℓ represents the overall disturbanc e at the ℓ − th receive an tenna and is mod eled as an N − dimen sional Gaussian vector w ith known ( full-rank) correlation matrix M . For future referen ce, we define ∆ = min { N , M } and δ = rank { A } , with 1 ≤ δ ≤ ∆ . Also, we de fine the received av erage signal-to- clutter ratio (SCR) as SCR = 1 N L E α " L X ℓ =1 α H ℓ A H M − 1 Aα ℓ # = σ 2 α N tr A H M − 1 A , (4) where the exp ectation is over the realization s of the vector α = vec { ( α 1 , . . . , α L ) } , tr {·} den otes trace and th e assumption has been mad e that E[ α ℓ α H ℓ ] = σ 2 α I M for ℓ = 1 , . . . , L . Giv en th e above ingr edients, we first derive a distribution- free test f or (3), namely a test whose implementation d oes not require prior knowledge of th e target param eters: in this work, we assume that d etection takes place at a fu sion center wherein 1 This assumptio n can be relaxe d through cell sync hronizat ion. 2 This becomes the con ventional Karhun en-Loe we expansio n to be under- tak en at each recei ve antenn a when, as assumed thro ughout this study , the clutt er exhibit s temporal correla tion, but no spatial correl ation. ✲ P M − 1 / 2 ✲ ✲ ✲ B δ B H δ k · k 2 M − 1 / 2 ✲ ✲ B δ B H δ ✲ k · k 2 ✲ r 1 r L ✲ T Fig. 2. GLR T stati stic computati on. un-qu antized versions of the r ℓ ’ s are made available. Next, we investi gate two design criteria for th e code m atrix A , so as to elicit the inter play between th e transmitted wa veforms s 1 ( t ) , . . . , s M ( t ) and dete ction perfor mance. I I I . D E T E C T O R S T RU C T U R E Lacking p rior inf ormation as to th e target statistics, the Neyman-Pearson test canno t be implemented, whereby a wise design strategy fo r the detector is the Generalized Likeliho od Ratio T est (GLR T) [7] which, und er the model (3), y ields: T = max α 1 ,..., α L ln f ( r 1 , . . . , r L | H 1 , α 1 , . . . , α L ) f ( r 1 , . . . , r L | H 0 ) H 1 > < H 0 η , (5) where f ( r 1 , . . . , r L | H 1 , α 1 , . . . , α L ) and f ( r 1 , . . . , r L | H 0 ) denote the condition al densities of the observations un der the two alternative hypotheses, while η is the detection thresho ld, to b e set based upon the desired false a larm prob ability , P f a say . The ma ximization inv olved by (5) is obviously tied to the structure of A , which can be in p rinciple arb itrary , and in particu lar to its r ank δ , wh ich in tur n may take o n any integer value from 1 to ∆ . Straightfor ward deriv ations lead to the following general f orm o f the GLR T , wh ich hold s fo r arbitrary code-matrix A : T = L X ℓ =1 P M − 1 / 2 A M − 1 / 2 r ℓ 2 H 1 > < H 0 η , (6) wherein P M − 1 / 2 A represents the orthogonal p rojector on to th e range span of the matrix M − 1 / 2 A . Let B D C H be the singular value d ecomposition (SVD) [9] of M − 1 / 2 A , wh ere B is a unitary N × N matrix co ntaining the left singular vectors, D is an N × M matrix containing the singu lar values on the main diagonal with [ D ] 1 , 1 ≥ · · · ≥ [ D ] ∆ , ∆ ≥ 0 , and C is a un itary M × M matrix co ntaining the right singu lar vectors. Un der rank- δ coding, the ortho gonal projector in ( 6) can be written as P M − 1 / 2 A = B δ B H δ , whe rein B δ is the N × δ matrix containin g th e first δ column s of B . Three relevant cases ar e subsumed by th is solution. 1) Under r ank-1 coding , we have th at A = a q H with a N − dimension al an d q un it-energy M − dime nsional; hence, in th is case the o rthogon al projector redu ces to P M − 1 / 2 A = a H M − 1 a − 1 M − 1 / 2 aa H M − 1 / 2 . 2) Under ran k- ∆ (i.e. , full-r ank) coding and N ≤ M , we have P M − 1 / 2 A = I N . 3) Finally , under ran k- ∆ coding and N ≥ M , we have P M − 1 / 2 A = M − 1 / 2 A ( A H M − 1 A ) − 1 A H M − 1 / 2 . Notice th at M − 1 / 2 r ℓ represents th e outpu t of a filter aimed at whiten ing the d isturbance imping ing on the ℓ − th transmit antenna, whereby the computation of the GLR T test statis tic in (6) may b e undertaken based on the scheme of Figure 2. The perfor mances o f the ab ove test can b e expressed in closed - albeit implicit - fo rm und er very general cond itions. In particu lar , und er rank- δ coding, we have: P f a = e − η δL − 1 X k =0 η k k ! , (7) P d = E α h Q δL p 2 β , p 2 η i , (8) where β = P L ℓ =1 α H ℓ A H M − 1 Aα ℓ and Q m ( · , · ) den otes the generalized Marcu m Q functio n of order m . No tice that (7) and (8) ge neralize previous results derived in [2] f or δ = ∆ and in [3] for δ = 1 , respectively . I V . C O D E D E S I G N A N D P E R F O R M A N C E B O U N D S Code op timization r equires determinin g a meanin gful p er - forman ce measu re to be optim ized. Paralleling the arguments of [2], we a ssign a pr ior to the vector s of the scattering coefficients; in particu lar , we assum e tha t α co nsists of LM indepen dent and iden tically distributed circularly -symmetric Gaussian random variables with equal variance σ 2 α . At this point, a reasonable design criterion in th e GLR T frame- work is to cho ose A so as to maximize the MI b etween the received observations r 1 , . . . , r L and the ch annel vecto rs α 1 , . . . , α L under H 1 , i.e., I ( r 1 , . . . , r L ; α 1 , . . . , α L | H 1 ) = L lo g 2 det I N + σ 2 α M − 1 2 AA H M − 1 2 [4]. Ind eed, sinc e the GLR T amou nts to wr iting the conditional likelihood gi ven the unk nown target paramete rs an d replacing them thr ough their maximu m-likelihood estimates p erformed based upon the av ailable o bservations, maximizing the MI b etween the received s ignals and the channel vectors is expected to im prove the GLR T p erformanc e [5]. T o make the maxim ization no n-trivial, a set of ph ysical constraints on A should be add ed. In the following we discuss two r ele vant cases: I) a power-unlimited system, wherein we constrain the no rmalized received average SCR in (4); II) a power -limited system, wherein we constrain the transmitted energy per signal dimension, i.e., tr { AA H } / N . In both cases, an addition al constraint can be im posed upon the ran k of A . A. P ower -unlimited system The pro blem to be solved is the following: max A log 2 h det I N + σ 2 α M − 1 2 AA H M − 1 2 i s . t . SCR = σ 2 α N T r A H M − 1 A ≤ ν rank { A } ≤ θ (9) with ν > 0 and θ ∈ { 1 , 2 , . . . , ∆ } . Le t B Λ B H be the spectral decomposition of the positi ve semi-definite matrix T = M − 1 2 AA H M − 1 2 , wh ere Λ = D D H = diag { λ 1 , . . . , λ N } with λ 1 ≥ . . . ≥ λ N ≥ 0 . Since the r ank constraint fo rces λ θ +1 = . . . = λ N = 0 , the problem (9) can also be recast as max λ 1 ≥ 0 ,...,λ θ ≥ 0 θ X j =1 log 2 (1 + σ 2 α λ j ) s . t . SCR = σ 2 α N θ X j =1 λ j ≤ ν (10) A straightfo rward applicatio n o f the Jensen inequa lity [4 ] allows now der i ving the following condition for optima lity: λ j = N ν θσ 2 α = N SCR θσ 2 α , j = 1 , . . . , θ , (11) which in turn implies that the o ptimal A should be such that M − 1 2 AA H M − 1 2 = N SCR θσ 2 α B θ B H θ . (12) According to (11) and (12), the optimal space-time code must have r ank { A } = δ = θ (i.e., th e cod e must exploit th e maximum possible numb er o f degrees of freedom as permitted by the rank co nstraint) and SCR = ν ; whereby , b oth in equality constraints in ( 9) can eq ui valently b e replac ed with a strict equality . The fo llo wing remark s are now in o rder . For a target SCR a nd a given rank constrain t θ , the above coding strategy amounts to g enerating θ ind ependent an d id en- tically d istrib uted diversity paths at each receive antenna; also, each path enjoys the same av erage sig nal-to-clutter r atio given by N SCR /θ . Notice th at increasing the num ber of diversity paths θ at each receive antenna (i.e., incre asing the rank o f A ) comes at the pr ice of reducing the received average SCR per path. This intu ition will be farth er exp loited in what follows. The solution in (1 1) coincid es with the so lution that we would obtain if, under a definite rank constrain t, we adopted the lower Ch ernoff-bound on the detec tion p robability as objective function . This result was first o bserved in [2] fo r fu ll-rank coding (i.e., θ = ∆ ). Finally , we point ou t that the optimal code matrix comp lying with (12) is not unique. I n fact, let U A Σ A V H A be th e SVD of A , whe re U A is a unitary N × N matrix containing the left singular vectors, Σ A is an N × M matrix containin g the singular values o n the main diag onal and V A is a u nitary M × M m atrix containing the right singular vectors. Also, let U M Λ − 1 M U H M be the spectr al deco mposition of M − 1 , wh ere U M = ( u M , 1 , . . . , u M ,N ) is an N × N un itary matrix an d Λ − 1 M = diag { 1 /λ M , 1 , . . . , 1 / λ M ,N } with 1 /λ M , 1 ≥ . . . ≥ 1 /λ M ,N > 0 . Then, (12) can b e rewritten as U M Λ − 1 / 2 M U H M U A Σ A = s N SCR θσ 2 α B θ . (13) It is clear that th e unitary matrix V A can be arbitrarily chosen since it does not com e in to play in (13). Also, it is instructive to conside r the class o f optimal solu tions obtained by setting U A = U M . In this case, the right singular vectors of A are match ed to the N eigenvectors of the noise matr ix M which in turn define as many orthogon al modes in the sign al space. The position of the θ non- zero singular values in Σ A determines which su bset o f ortho gonal modes is employed for transmission. In particular, let n (1) , . . . , n ( θ ) be the row (or column) indexes co rrespondin g to the n on-zero singular values in Σ A . Condition ( 13) is fulfilled b y setting [ Σ A ] n ( j ) ,n ( j ) = s λ M ,n ( j ) N SCR θσ 2 α , j = 1 , . . . , θ . (14) It is seen fro m (14) th at more e nergy must be allocated to m ore interfered mod es in ord er to eq ualize the ir received average SCR’ s. Amon g all the p ossible cho ices, setting n ( j ) = j f or j = 1 , . . . , θ minimizes the to tal transmit energy tr { Σ A Σ H A } required to a chie ve a given SCR since tr ansmission takes place along the least interfered modes. 1) Ana lysis and trade-o ffs : Th e detectio n perfo rmance of the GLR T under rank - θ optima l coding in ( 11) has a simple closed-for m expression. Ind eed, since the con straint on SCR allows ge nerating exactly θL ind ependent div ersity p aths with one and the same received av erage SCR g i ven by N SCR /θ , the test statistic ( 6) is a Gamma ra ndom variable with sha pe parameter θ L a nd scale paramete r 1 + N SCR /θ un der H 1 , implying that P d = exp − η 1 + N SCR /θ θ L − 1 X ℓ =0 1 ℓ ! η 1 + N SCR /θ ℓ . The inherent trade-off between number of generated di versity paths θ L and am ount of en ergy integration gran ted o n each path N SCR /θ is visible a lready at this stage, and is co nfirmed by the asymptotic behavior (f or incr easingly large SCR ) of the detection prob ability , i.e .: P d ∼ 1 − 1 ( θL )! η 1 + N SCR /θ θ L . (15) Notice that no strategy is uniform ly sup erior in terms of detection p erformanc e, but the o ptimal value o f θ d epends upon the operating SCR , as also confirmed by Figure 3. Ind eed, while for large SCR the asymptotic behavior in (1 5) ind icates that maxim izing the d i versity order ( i.e., ch oosing θ = ∆ ) amounts to maximizin g th e detection pr obability , in the low signal-to-clu tter regime this trend d oes no t hold anymo re. T o have an intuitive justification of this fact, recall th at increasin g the number o f diversity pa ths eventually leads to more and more con strained target amplitude fluctuation s. On the o ther hand, (8) reveals that the de tection probability is in the form P d = E β [ F ( β , η )] = E β 0 [ F ( β r ms β 0 , η )] , wher e β r ms is th e root m ean square value o f the ra ndom variable β , while β 0 is a random variable with unit rms value. F ( β , η ) , r egarded as a function o f β , is a cu mulativ e distribution function an d, therefor e, exhibits a sigmoid al shap e ( i.e., is ∪− conve x in th e region β r ms → 0 , while being ∩ -con vex in the region β r ms → ∞ ). Und er these circu mstances, mor e and m ore con strained fluctuations (i. e., lower dispersio n r atios of the p arameter β ) typically result in larger values o f P d in the ∩− conv exity region, while being d etrimental in the ∪− convexity region. −10 −5 0 5 10 15 20 25 10 −2 10 −1 10 0 Power-un limi ted: N = 4, M = 4, L = 1, P f a = 10 − 4 1 − P d S C R [dB] θ =4 θ =3 θ =2 θ =1 Fig. 3. Probabili ty of miss versus SCR for the opt imal codin g in (11). B. P ower -limited system In power-limited systems, the problem to be solved is max A log 2 h det I N + σ 2 α M − 1 2 AA H M − 1 2 i s . t . tr { AA H } ≤ N E rank { A } ≤ θ (16) where E > 0 is the av ailable transmit e nergy per sig nal dimension and θ ∈ { 1 , 2 , . . . , ∆ } . A solution to ( 16) was derived in [ 3] for θ = N ≤ M . Also, maximizing th e o bjecti ve function in (16) for θ = 1 am ounts to maximizing SCR in (4) and the solution to this prob lem un der a transmit energy constraint c an again be fo und in [3]. In the following, the solution to (1 6) for arb itrary values of θ is discussed. Notice first that the prob lem ( 16) can be re cast as max T 0 log 2 det I N + σ 2 α T s . t . tr { M 1 2 T M 1 2 } ≤ N E rank { T } ≤ θ (17) where we r ecall T = B Λ B H . Since th e r ank constraint fo rces λ θ +1 = . . . = λ N = 0 , (17) is also eq ui valent to max Λ θ 0 , B H θ B θ = I θ θ X j =1 log 2 (1 + σ 2 α λ j ) s . t . tr { B θ Λ θ B H θ M } ≤ N E (18) where Λ θ = diag { λ 1 , . . . , λ θ } , B θ = ( b 1 , . . . , b θ ) and b j is the j − th column of th e unitar y matr ix B = ( b 1 , . . . , b N ) . Observe that the choice of B θ only affects the feasible region of the problem (18). As a consequ ence, the optimal B θ must ensure th e largest fe asible set fo r Λ θ which r ules the value of the objectiv e fu nction. This imp lies that th e first θ colum ns of B must b e equ al to the eig en vectors u M , 1 , . . . , u M ,θ of M correspo nding to th e θ smallest e igen values [10 , L emma 9.H.1.h ]. Th e last N − θ c olumns of B can b e arb itrarily chosen (provided that B is unitary) since they do not come into play in th e optimization (1 8). Therefo re, we can assume in the following that B = U M , which in turn implies U A = U M and T = U M Λ − 1 2 M P A Λ − 1 2 M U H M with P A = Σ A Σ H A = diag { p A, 1 , . . . , p A,θ , 0 . . . , 0 } . Hen ce, (18) reduces to the fo llo wing standard water-filling problem [4] max p A, 1 ≥ 0 ,...,p A,θ ≥ 0 θ X j =1 1 + σ 2 α p A,j λ M ,j s . t . θ X j =1 p A,j ≤ N E (19) whose solution is simply giv en by p A,j = max 0 , µ − λ M ,j σ 2 α , θ X j =1 p A,j = N E . (20) Some r emarks ar e now in order . Und er tr { AA H } ≤ N E and rank { A } ≤ θ , the optimal code matrix A = U A Σ A V H A is recovered (u p to a right m ultiplication b y a n M × M unitary matrix ) by f orcing U A = U M , [ Σ A ] j,j = √ p A,j for j = 1 , . . . , θ and p A,j giv en b y (20), and [ Σ A ] j,j = 0 f or j = θ + 1 , . . . , ∆ . Th is solution ( which subsume s the results in [3] for the special cases θ = 1 an d θ = N ≤ M ) has a nice physical inter pretation. Th e optimized code discards the noisiest N − θ modes defined by M in the signal spa ce. Also, sin ce th e rem aining θ or thogonal direction s present a different disturban ce level, m ore en ergy is allocated to m ore reliable mod es ac cording to (20). The numbe r of ac ti vated modes depend s not only upon the u pper ran k c onstraint θ , but also u pon the av ailable transm it energy E , the target strength σ 2 α and the eigenvalues λ M , 1 ≤ . . . ≤ λ M ,θ of the disturb ance covariance matr ix. If E σ 2 α /λ M ,θ → ∞ , then p A, 1 ≥ · · · ≥ p A,θ > 0 and δ = rank { A } = θ . Instead, if not en ough energy is av ailable for tran smission or if th e target is weak, a dditional modes may be switched off. Also, no tice that the activ ated modes have in gener al different rece i ved av erage signal-to - clutter ratio ’ s given by σ 2 α p A,j /λ M ,j for j = 1 , . . . , δ ≤ θ (more on this infr a ). W e em phasize that the situation here is dramatically different from what observed in the previous section under a recei ved a v - erage SCR co nstraint, wherein the tr ansmitter always acti vates the largest po ssible nu mber of o rthogona l modes permitted by the r ank constrain t and p umps into them as much energy as to make these path s equiv alen t at the receiv er side. 1) Ana lysis and trade-offs: In Figure 4, w e rep ort 1 − P d (prob ability of miss) f or the o ptimal water-filling solution in (20). W e assume P f a = 10 − 4 , M = N = 4 and L = 1 ; also, we consider an exponentially- shaped distur bance covariance matrix with [ M ] i,j = σ 2 d 0 . 7 | i − j | , whose eigenv alues are { 0 . 203 , 0 . 318 , 0 . 75 4 , 2 . 725 } σ 2 d . T o elicit the jo int effects o f th e transmit energy con straint and the target strength, the curves are plotted versus the parameter γ = E σ 2 α /σ 2 d . Notice first that, if γ → 0 , the optimal co de matrix acti- vates only the least interfere d mo de, independ ent of the ran k constraint θ ; in this case, the test statistic ( 6) is a Gamma random variable with shape parameter L and scale para meter −20 −15 −10 −5 0 5 10 15 20 25 10 −4 10 −3 10 −2 10 −1 10 0 Power-limited: N = 4, M = 4 , L = 1 , P f a = 10 − 4 , ρ = 0 . 7 1 − P d γ [dB] θ =4 θ =3 θ =2 θ =1 Fig. 4. Probability of miss versus γ for the opt imal codin g in (20). 1 + σ 2 α N E /λ M , 1 under H 1 , imply ing that P d = exp − η 1 + σ 2 α N E /λ M , 1 L − 1 X ℓ =0 1 ℓ ! η 1 + σ 2 α N E /λ M , 1 ℓ . This result con firms the basic in tuition that, when th e tran smit energy is scar ce or if the target is weak, we should give u p div ersity and concetrate all the energy along the least interfered direction in the signal space in order to maximize the r ecei ved av erage signal-to- disturbance ratio. A similar result also holds in MIMO p oint-to-po int wireless chann els [6]. On the other hand , if γ is large e nough, relax ing the rank constraint θ a llo ws gener ating δ ≥ 1 o rthogona l mo des 3 . In our example, if − 6 . 1 dB < γ < 2 . 3 dB up to three mo des c an be acti vated; instead, full rank c oding b ecomes possible o nly if γ > 2 . 3 dB. For a fixed E , it is clear that increasing the n umber δ of mo des (i.e ., di versity b ranches) again cames at the price of reducin g the en ergy transmitted (an d the refore th e a verage SCR ratio recei ved) along each path. A s a co nsequence, there is no strategy which is uniformly optimal for all v alues of γ . R E F E R E N C E S [1] E. Fishle r , A. Haimovich, R. Blum, L. Cimini, D. Chizhik, and R. V alen- zuela , “Spa tial di ve rsity in radars - Mode ls and dete ction performance, ” IEEE T rans. Signal Pr ocess. , vol. 54, no. 3, pp. 823–838, Mar . 2006. [2] A. De Maio and M. Lops, “Desig n principles of MIMO rada r detectors, ” IEEE Tr ans. A er osp. Elec tr on. Syst. , vol. 43, no. 3, pp. 886–898, Jul. 2007. [3] ——, “Space-time coding in MIMO radar , ” in MIMO Radar Signal Pr ocessing , Jian-Li and P . Stoica, Eds. Ne w Y ork, NY : John W iley & Sons, Inc., Apr . 2008 (in press). [4] T . M. Co ver an d J. A. T homas, Elements of Inf ormation Theory . New Y ork , NY : John W iley & Sons, Inc., 1991. [5] M. R. Bell, “Informa tion theory and radar wav eform design, ” IEEE T rans. Inf. Theory , vol. 39, no. 5, pp. 1578 –1597, Sep. 1993. [6] D. Ts e and P . V iswana th, F undamen tals of W ireless Communicati on . Cambridge Uni versity Press, 2005 . [7] H. L. V . Trees, Detection, Estimation , and Modul ation Theory – P art III . Ne w Y ork, NY : John W iley & S ons, Inc., 2001. [8] E. J. K elly and W . L . Root, “ A representati on of vector -va lued random processes, ” J ournal of Math ematics and Physic s , vol. 39, no. 3, pp. 211– 216, Oct. 1960. 3 In this case , the test statistic (6) is the s um of δ Gamma rando m v ariab les with shape parameter L and dif ferent scale parameters. [9] R. A. Horn and C. R. Johnson, Mat rix Analysis . Cambridge Uni versity Press, 199 3. [10] A. W . Marshall and I. Olkin, Inequalities: Theory of Majorization and Its Applic ations . Academic Press, 1979.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment