Data Likelihood of Active Fires Satellite Detection and Applications to Ignition Estimation and Data Assimilation
Data likelihood of fire detection is the probability of the observed detection outcome given the state of the fire spread model. We derive fire detection likelihood of satellite data as a function of the fire arrival time on the model grid. The data likelihood is constructed by a combination of the burn model, the logistic regression of the active fires detections, and the Gaussian distribution of the geolocation error. The use of the data likelihood is then demonstrated by an estimation of the ignition point of a wildland fire by the maximization of the likelihood of MODIS and VIIRS data over multiple possible ignition points.
💡 Research Summary
The paper presents a physically‑motivated probabilistic framework for incorporating satellite active‑fire detections into wildland fire spread models. The authors define the model state as a fire‑arrival‑time field on a spatial grid. They first model the heat release after fire arrival with a simple exponential decay, representing the fraction of maximum heat as a function of time. This heat fraction is then fed into a logistic regression model of fire detection probability, originally calibrated by Schroeder et al. (2008), which yields a detection probability that rises sharply once the heat fraction exceeds about 1 % and includes a low false‑alarm rate. To account for the substantial geolocation error of satellite pixels (e.g., ~1.5–2 km for VIIRS), the detection probability curve is convolved with a two‑dimensional Gaussian kernel. The resulting log‑likelihood function is asymmetric: it increases steeply just after fire arrival and decays more slowly, matching the empirical shape observed in satellite data.
The derived likelihood is applied to evaluate the consistency between a simulated fire and observed detections. For any candidate ignition point and time, the WRF‑SFIRE (WRF‑Fire) model is run, producing a fire‑arrival‑time map. The likelihood of each observed MODIS or VIIRS active‑fire pixel is computed using the analytical function, and the sum of log‑likelihoods over all pixels provides a scalar “data likelihood” for that simulation. Maximizing this scalar across a set of candidate simulations yields a maximum‑likelihood estimate (MLE) of the ignition location and time.
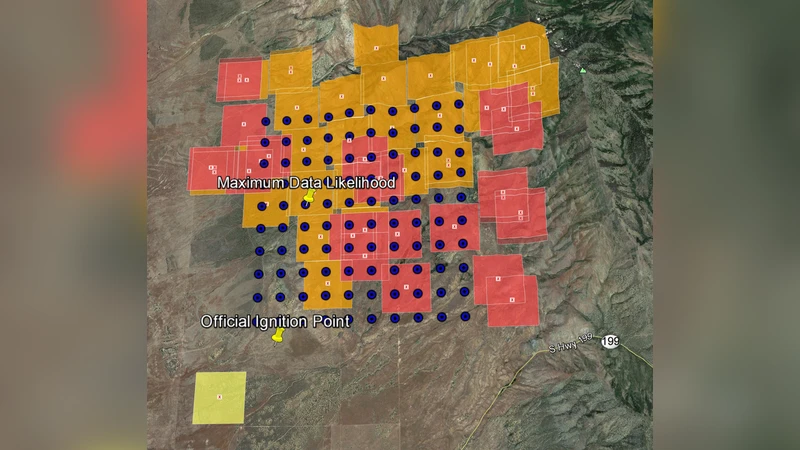
Three experiments validate the approach. 1) A synthetic, flat‑terrain fire with homogeneous fuel and no wind is generated analytically. 500 simulations over a 10 × 10 spatial grid and five ignition times are evaluated. The MLE correctly identifies the true ignition point, but the estimated ignition time is biased early (≈10 % earlier) because an earlier start yields a larger fire that covers more detection pixels, artificially inflating the likelihood. 2) The “Hill” experiment uses the full WRF‑SFIRE coupled atmosphere‑fire model on a 2 km × 2 km domain with a small hill and northeast wind. Artificial detection pixels are placed on the fire perimeter at t = 400 s. Out of 300 simulations spanning a 10 × 10 grid and three ignition times, the highest likelihood corresponds exactly to the true ignition point (1400 m, 1400 m) and time (60 s). 3) A real‑world case, the 2013 Patch Springs fire in Utah, is analyzed using the first two days of MODIS and VIIRS detections. A 10 × 10 grid (≈500 m resolution) and ten ignition times (2 h spacing) generate 1,000 simulations. The MLE locates the ignition at 40.372° N, ‑112.659° W at 01:00 UTC on 11 Aug 2013, roughly 3 km north of the official investigation point and one hour earlier than the reported ignition time (02:00 UTC). The authors attribute the spatial offset to limited detection coverage and the temporal offset to the coarse time sampling of the simulations.
The study’s contributions are threefold: (i) a derivation of a fire‑detection likelihood that explicitly links heat release, logistic detection response, and geolocation uncertainty; (ii) demonstration that this likelihood can be efficiently evaluated for many candidate simulations, enabling systematic MLE of ignition parameters; and (iii) illustration of the likelihood’s potential role in data assimilation frameworks (e.g., particle filters, variational DA, or optimization‑based inverse modeling) as a physically consistent observation operator. The authors suggest future work to incorporate additional environmental dependencies (fuel moisture, wind speed), to treat missing data and cloud‑obscured pixels within a Bayesian framework, and to develop fast optimization algorithms for real‑time operational use. Overall, the paper provides a solid statistical bridge between coarse, uncertain satellite fire detections and high‑resolution fire‑spread models, opening pathways for more accurate fire initialization and improved predictive capabilities.
Comments & Academic Discussion
Loading comments...
Leave a Comment