A Fast Blind Impulse Detector for Bernoulli-Gaussian Noise in Underspread Channel
The Bernoulli-Gaussian (BG) model is practical to characterize impulsive noises that widely exist in various communication systems. To estimate the BG model parameters from noise measurements, a precise impulse detection is essential. In this paper, …
Authors: Bin Han, Hans D. Schotten
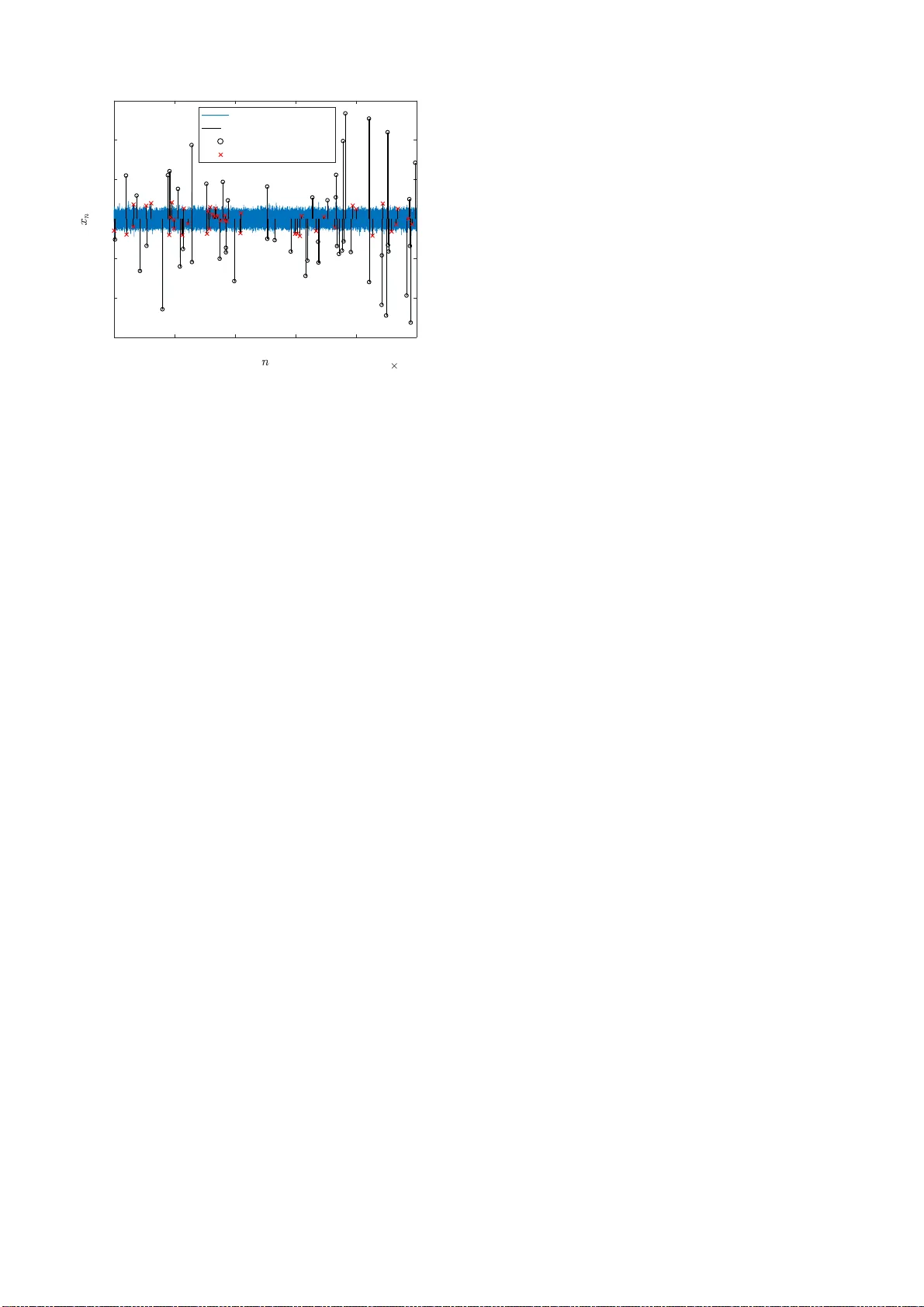
A F ast Blind Impulse Detector for Bernoulli-Gaussian Noise in Underspread Channel Bin Han and Hans D. Schotten T echnische Universit ¨ at Kaiserslautern Institute of W ireless Commu nication Paul-Ehrlich-Straß e 11, 6766 3 Kaiserslautern, Germany Email: { bin han, schotten } @eit.uni-kl.de Abstract —Impulsive noises widely existing in various channels can significantly degrade the perfor mance and reliability of communication systems. The Ber noulli-Gaussian (BG) model is practical to characterize noises in this category . T o estimate the BG model p arameter s fro m noise measurem ents, a precise impulse detection is essential. In this paper , we propose a novel blind impul se detector , whi ch i s prov en to be fast and accurate fo r BG noise in u n derspread communication channels. I . I N T R O D U C T I O N Impulsive noises are widely observed in various comm uni- cation systems, including ultra wide-band (UWB) systems [ 1], wireless local area ne twork s (WLAN) [2 ], digital subscriber line (DSL) network s [ 3] and power line commun ication (PLC) systems [4]. Due to their non-stationar y n a tu re and high peak power , they can significantly degrad e the per formance and reliability o f commu nication systems. Such im pacts can become critical in u rban and ind u strial en viron ments where 1) frequen t mechanical switching operatio ns and v ibrations are present to pr oduce dense impulsive noises, an d 2) ultra-high reliability and ultra-low late n cy ar e exp e c ted in short-r ange wired/wireless com munication application s. V arious use cases of this kind have bee n ad d ressed in scopes of both the Fifth Gener a tion (5G) mobile networks [5] and new advanced industrial commu nication solution s [ 6]. In these contexts, technique s o f modeling impulsi ve noises a r e required a s a major tool to d efine chan nel models and thereby de velop robust co mmunication systems. The Bern o ulli-Gaussian (BG) mo del has been widely ap- plied o n impu lsi ve no ises. Compared to other co m mon im pul- si ve noise models such like the M id dleton’ s Class-A (MCA) model [7] and the symmetric α -stable (S α S) mo del [8], the BG mod el stan ds o ut with its comp atibility to d if feren t noise bandwidth s, while simultaneo usly exhibitin g a h e a vy-tailed probab ility density function (PDF) with a simple closed-form expression. Mo reover , it can be easily extend ed to the Markov- Gaussian mod el to ch aracterize noise b ursts [9]. Howe ver , d espite these super iorities, the deploymen t o f BG model in communication s and signal processing has been limited by the insuf ficient study on its par ameter estimation, or mor e specifically , o n the impulse d etection. Unlike the MCA/S α S models that describ e the overall statistics of the mixed no ise, the BG model separates im pulses from the backgr o und n oise, so that its p arameter estimation r e lies on accu racy impulse detection . Unfor tu nately , most existing methods of blin d impulse detection fo r BG processes, if not all, either suffer from high ord er of compu tational complexity , or high ly rely on the initial guess to av oid co nvergence at local extremes that may bias far aw ay fr om th e ground truth. In th is paper, focu sin g on the p a rticular but common case of undersp r ead channels, we pro p ose a n ovel b lind BG impulse detector, which is fast, accura te and reliab le in wide ranges of im p ulse rate and impulse-to-back ground power ratio. The rest part o f this paper is organized as fo llo ws: First, in Sec . II we setup the BG mo del f or impulsive noises, discuss abo ut its app roximation in u nderspread channels, and analy ze the detection model. Then in Sec. III we briefly revie w the existing methods of BG impulse detection. Sub sequently , in Sec. IV we introdu c e our prop osed approach, inclu d ing a novel iter ati ve algorithm , a robust Gaussian estimator and a sparsity-sensitive initializing m ethod. T o the end, some numer ical simulation results are presented in Sec.V, before we co n clude our work and provide some outloo k s in Sec. VI. I I . S Y S T E M M O D E L A. Impu lsive Noises a s Bernoulli-Gaussian Pr ocesses A BG pro cess X ( ρ , σ 2 1 , σ 2 2 ) switches rando mly between two ind e p endent Gaussian states, the switchin g behavior is determined by an inde pendent Bern oulli process Φ : ( φ n ∼ B ( 1 , ρ ) , ( x n | φ n ) ∼ N 0 , σ 2 1 + φ n σ 2 2 . (1) In the context of impulsive n oise, ρ ∈ [ 0 , 1 ] is the impulse rate , σ 2 1 is the backgr oun d no ise p ower , σ 2 2 > σ 2 1 is the impulsive no ise power , and n ∈ N is the index o f samples. Note that every observation x n is independ ently and identically distributed (i.i.d.) with respect to the PDF f X ( x ) = p Φ ( 0 ) f X ( x | Φ = 0 ) + p Φ ( 1 ) f X ( x | Φ = 1 ) = ρ q 2 π σ 2 1 e − x 2 2 σ 2 1 + 1 − ρ q 2 π σ 2 1 + σ 2 2 e − x 2 2 ( σ 2 1 + σ 2 2 ) . (2) In m ost litera tu res such as [10]–[14], the observation d istor- tion is considere d, so that a linear time- in v ariant (L T I ) system c Copyri ght 2018 IEEE H is intro duced to filter the BG sequence { x 0 , x 1 , . . . x N − 1 } , and an extra error ǫ is a d ded at the outp ut, to generate the final observation seq u ence: y n = L Õ m = 0 x n h n − m + ǫ n , (3) where h is the impulse response of H with L a s its length, and ǫ ∼ N ( 0 , σ 2 ǫ ) is Gaussian distributed. Usually , h and σ 2 ǫ are considere d as known so that p ( y n | φ n ) can be ca lculated with p ( x n | φ n ) , h and σ 2 ǫ straight-fo r ward. B. App r oximatio n s in Und erspr ead Channe ls Many c hannels with impu lsi ve noises are repor ted to be generally un derspread, such as UWB chan nels [15] and PLC channels [ 16]. In this case, L is negligible with respect to the symbol interval of co mmunication systems, so we can app r ox- imately consid e r th at h n = δ ( n ) , and therefo re y n = x n + ǫ n . As ǫ is a Gaussian noise inde p endent fr om X , we ha ve ( y n | φ n ) ∼ N ( 0 , σ 2 1 + σ 2 ǫ + φ n σ 2 2 ) . (4) This dif fers fro m Eq. (1) only with a known constant o f fset on the backg round noise power . Hence, it is con venient no t to distinguish the observation error from backgro und n oise, but to simply assume that an un contaminated observati on sequence of X is av ailable, as usually d one in the field of noise char acterization e.g . [ 4], [ 9 ], [17]. C. Ba y esian Estimatio n a nd Impulse Detection T aking the unde r spread assumption, the problem of BG parameter estimation can be represented as: g i ven a finite sequence of obser v ation x = { x 0 , x 1 , . . . , x N − 1 } , to estimate the most pro b able p a rameter vector θ = ρ , σ 2 1 , σ 2 2 : ˆ θ = arg max θ ∈ Θ f ( θ | x ) . (5) where Θ = [ 0 , 1 ] × R + × R + is the sp a ce of θ . As the a posteriori PDF f ( θ | x 0 , x 1 , . . . , x N − 1 ) is impractical to obtain, we naturally rely o n the Bayesian method : f ( θ | x ) = f ( x | θ ) f ( θ ) f ( x ) . (6) Recalling that every obser v ation x n is i.i.d. , we have ˆ θ = arg max θ ∈ Θ f ( x | θ ) f ( θ ) f ( x ) = arg max θ ∈ Θ f ( x | θ ) f ( θ ) = arg max θ ∈ Θ f ( θ ) N − 1 Ö n = 0 f X ( x n | θ ) . (7) where f X ( x n | θ ) can b e calculated as Eq. (2). However , th e a priori PDF f ( θ ) is still hard to direc tly o btain fr om x or ˆ θ . Noticing that b oth Bernoulli and Gau ssian processes ar e stationary (althou gh BG pr o cesses are n on-stationary ), θ can be c onsistently estimated f rom the e mpirical statistics, if on ly the groun d tru th of Bern o ulli sequen ce φ = { φ 0 , φ 1 , . . . , φ N − 1 } is known: lim N →∞ 1 N N − 1 Í n = 0 φ n = ρ ; lim N →∞ V ar { x n | φ n = 0 } = σ 2 1 ; lim N →∞ V ar { x n | φ n = 1 } = σ 2 1 + σ 2 2 . (8) More importantly , unlike f ( θ ) , the a pr iori pro bability mass function of φ can be simply written as p φ = N − 1 Ö n = 0 ρ φ n ( 1 − ρ ) 1 − φ n . (9) This encourages to estimate φ instead of directly estimating θ . Similar to Eq. (7) we have ˆ φ = arg max φ ∈ Ω p φ | x = arg max φ ∈ Ω p φ N − 1 Ö n = 0 f X x n | φ = arg max φ ∈ Ω p φ N − 1 Ö n = 0 f X ( x n | φ n ) (10) where Ω = { 0 , 1 } N . When N is large enou gh, we can estimate ρ , σ 2 1 and σ 2 2 with Eq. (2), then calculate p φ with Eq. (9), and f X x n | φ as f X ( x n | φ n ) = 1 q 2 π ( σ 2 1 + φ n σ 2 2 ) e − x 2 n 2 ( σ 2 1 + φ n σ 2 2 ) (11) Thus, the problem of estimatin g θ from a c o ntinuous space Θ is co n verted to an impulse-d etection pr oblem, where an op- timum should be selected from 2 N different bin ary sequ ences. I I I . E X I S T I N G B G I M P U L S E D E T E C T I O N M E T H O D S When the impulse r ate ρ is low and the impulse-to- backgr o und power r atio σ 2 2 / σ 2 1 is high , the detection of h ig h- powered im p ulses from BG noise can be easily accom plished throug h rejectin g outliers with r o bust statistics an d simple thresholdin g, e.g . the appr oach r eported in [1 8]. Ho we ver , impulsive noises do n ot alw ays fulfill both the prem ises simultaneou sly . Aiming at a universal solution for a gen eral Θ , the Bayesian ap proach in Eq. (10) is prefer red. Due to the ab sence o f gradient inform ation, Eq. (1 0) can not be analy tically solved. On the oth er h and, a fu ll-search for the optimal ˆ θ in the space { 0 , 1 } N is im practical d ue to its huge time complexity of expone n tial o r der . Theref ore, h e u ristic optimization algorithms appear attracti ve for this pro b lem. The most classical method of th is kind for B G p rocesses is provided by K ormylo and Mend e l , who pr oposed their famous single most likely r eplaceme n t (SMLR) algorithm in the early -1980s [ 10], which begins with an ar bitrary initial guess of ˆ φ and iteratively u pdate it. In each loop , it updates one and only one sample in ˆ φ , which maximizes the upda ted likelihood function. The algor ith m keeps iterating in lo ops to its convergence, i.e. until no single-sample upda te o f ˆ φ c a n further raise th e resulted likelihood function . T h e SMLR is proven to be highly practical due to its simple and efficient iterativ e im plementation, which decre a ses the time complexity from expone ntial O ( 2 N ) to polyn omial O ( N 3 ) . Howe ver , the weakn ess of SMLR is also con spicuous, that it can easily end up with a local c on vergence in stead o f global optim um. Therefore, its perform ance relies so h ighly on the initial guess, that it can har dly be deployed as a blind detecto r alon e, b ut only u nder supervision of ano ther initializing estima to r . Besides, th e SMLR was de sig n ed for BG sequ ence deconv olution, where θ is known so th at f ( φ ) can b e d irectly calculated without ap plying Eq . (8). Under this condition , noise measur ements can b e broken into small sub- sequences, each with N up to several thou sands, for which the SMLR’ s time complexity o f O ( N 3 ) is rea sonably satisfy in g. In con trast, for ou r goal of blind BG mo del estimation u nder discussion here, θ is unknown but must be o nline estimated and upda te d with r e spect to ˆ φ in every iteration. T o gua r antee the validity o f ergod ic estimatio n in Eq. (8), especially in the cases with v ery small values of ρ (for instance, PLC noises with weak distur bance are r eported to have im p ulse rate down to 1 . 35 × 10 − 5 [17]), a h uge o bservation length N becomes essential, an d the SML R with cubic time com p lexity appears c omputationa lly expensiv e. Therefor e , the SMLR is inappro priate f or b lin d BG model estimation of h ighly sparse impulsive noises. In the mid-19 90s, Champagna t et al. enhan ced SMLR with further improved numerical efficiency and memory requ ire- ment [12]. Recently in the con text of sparse signal restoratio n, Soussen et al. h a ve also adop te d SMLR as the so-called single best replacem e nt (SBR), which is repor ted to be fast an d stable [13]. Nevertheless, both the variants rem ain with the same order o f time comp lexity , and do no t overcome the prob lem of local convergence. Apart f rom the SMLR algorith m, Lavielle has shown that some classical Bayesian methods such as the maximu m a pos- teriori (MAP), the marginal proba b ility mo de (M PM) and the iterativ e co nditional mo de (ICM) also give good p erforman ces in BG dec on volution [11]. Espec ia lly , the I CM is proven to be much faster th an the others with its quadric time c o mplexity , which enables its dep loym ent on huge datasets. Howe ver, similar to the SMLR, the ICM a lso usually conv erges to local minimums, leading to an accur acy sev erely depend ing on the initial guess of imp ulse locations. I V . M E T H O D S Aiming at a fast impulse detection, we designed a novel approa c h , which we intro duce in this section as follows. A. Iterative Thr eshold Shifting W e start wit h a simpler problem wh ere σ 2 1 and σ 2 2 are known. In this situatio n, the maxim um likelihood impulse detector always has a thresholdin g beh a vior: Theorem 1. Give n a n observation segment x o f underspr ead BG n oise, wher e every sample x n is i.i.d . a ccor ding to E q . (2) and the Gaussian pa rameter s σ 2 1 , σ 2 2 ar e known, the output of the MLE defi n ed by Eq. (10) always fulfill | x m | ≥ | x n | ⇐ ⇒ ˆ φ m ≥ ˆ φ n (12) Pr o of. Con sider two d ifferent estimations of φ , namely α and β , respectiv ely , which dif fer from each other at only two samples: α m = 0 , α n = 1; β m = 1 , β n = 0; α i = β i ∀ i < { m , n } . (13) Comparing their a po steriori p r obability densities we have: p α | x p β | x = f x | α p α f x | β p β = f X x m | ˆ φ m = 0 f X x n | ˆ φ n = 1 f X x m | ˆ φ m = 1 f X x n | ˆ φ n = 0 = e − x 2 m 2 σ 2 1 e − x 2 n 2 ( σ 2 1 + σ 2 2 ) e − x 2 n 2 σ 2 1 e − x 2 m 2 ( σ 2 1 + σ 2 2 ) = e 1 2 ( x 2 n − x 2 m ) 1 σ 2 1 − 1 σ 1 2 + σ 2 2 (14) As p α | x ≥ 0 an d p β | x ≥ 0 , we kn o w that p α | x > p β | x x 2 m < x 2 n ; p α | x = p β | x if x 2 m = x 2 n ; p α | x < p β | x x 2 m > x 2 n . (15) Giv en an arbitra r y estimation ˆ φ , an increase in the a posterior i probab ility d ensity p x | ˆ φ can be achieved by switching the values of an arbitrary assignment p a ir ˆ φ m , ˆ φ n = ( 0 , 1 ) tha t | x m | > | x n | to ( 1 , 0 ) . Keeping iterati vely d oing th is until no such pair is available, Eq . (1 2) is ensured to be valid. Thus, the MLE of φ is converted into an op timal selectio n of a thresho ld T that maximizes p ˆ φ | x with ˆ φ n = ( 1 | x n | ≥ T ; 0 otherwise . (16) Calling b ack the mechanism of SMLR, where in each loop all N different candidate up dates of ˆ φ must be ev aluated: now we know that o nly the candidates in a ”th resholded” style of Eq. (1 2 ) are meaningful. Based on this, we designed o ur iterative thr eshold shifting (IT S) method, which is equiv alent to the SML R algorith m under th e discussed con ditions, as described in Fig. 1. Differing f rom the original LSMR, wh ich has to compute the cost fun ction f or N si ngle replaceme n t candidates in every loop, our ITS algo rithm considers only two candid a te s in every loop, so that th e time comp lexity is reduced from O ( N 3 ) to O ( N 2 ) . Giv en σ 2 1 , σ 2 2 , start with an in itial thre sh old T 0 ; for i = 0 to N − 1 do Main loop ˆ φ n ← ( 1 | x n | ≥ T i 0 otherwise ; Estimate ρ with ˆ φ and x ; P ← f x | ˆ φ p ˆ φ ; Select l : x 2 l ≤ x 2 n , ∀ ˆ φ n = 1 ; Generate ζ : ζ n = ( 0 n = l ˆ φ n otherwise ; Estimate ρ l with ζ and x ; P l ← f x | ζ p ζ ; Select u : x 2 u ≥ x 2 n , ∀ ˆ φ n = 0 ; Generate η : η n = ( 1 n = u ˆ φ n otherwise ; Estimate ρ u with η and x ; P u ← f x | η p η ; switch max { P , P l , P u } do Thr esh old shifting case P l do T i + 1 ← min ( x n | ζ n = 1 ) end case P u do T i + 1 ← min ( x n | η n = 1 ) end otherwise do return ˆ φ end end end Fig. 1: The ITS alg orithm with k nown Gaussian pa r ameters B. Robust Gaussian Estimation When the Gaussian p arameters σ 2 1 and σ 2 2 are unknown, they have to be online estimated. So the ITS algorithm m ust be modified as Fig. 2 sh ows. Nevertheless, as indicate d by Eq. (8), the estimations are depend ent on φ , so that Eq. (1 4) is rewritten as: p α | x p β | x = e − x 2 m 2 σ 2 1 , α e − x 2 n 2 σ 2 1 , α + σ 2 2 , α e − x 2 n 2 σ 2 1 , β e − x 2 m 2 σ 2 1 , β + σ 2 2 , β × Ö i ∈ I σ 1 , β σ 1 , α e x 2 i 2 σ 2 1 , β − x 2 i 2 σ 2 1 , α × Ö j ∈ J v u t σ 2 1 , β + σ 2 2 , β σ 2 1 , α + σ 2 2 , α e x 2 j 2 σ 2 1 , β + σ 2 2 , β − x 2 j 2 σ 2 1 , α + σ 2 2 , α (17) where σ 2 1 , α , σ 2 2 , α and σ 2 2 , α , σ 2 2 , β are the Gaussian param e- ters estimated with resp ect to α and β , resp ecti vely; I and J are the index sets that ( α i = β i = 0 ∀ i ∈ I ; α i = β j = 1 ∀ j ∈ J . (18) This removes th e sup eriority of thresholding - based imp ulse Start with an initial th reshold T 0 ; for i = 0 to N − 1 do Main loop Generate ˆ φ ; Estimate ρ , σ 2 1 , σ 2 2 with ˆ φ and x ; P ← f x | ˆ φ p ˆ φ ; Select l , gene r ate ζ ; Estimate ρ l , σ 2 1 , l , σ 2 2 , l with ζ and x ; P l ← f x | ζ p ζ ; Select u , ge nerate η ; Estimate ρ u , σ 2 1 , u , σ 2 2 , u with η and x ; P u ← f x | η p η ; switch max { P , P l , P u } do Thr eshold sh ifting . . . end end Fig. 2: The IT S algorithm with unkn o wn Gaussian paramete r s detection pr ovid ed by Eq . 1 5 and the ITS algo rithm is therefo re no m ore gu aranteed to equal the SMLR. As a consequen ce, the co nverging speed will d e c rease while the error r ate may increase. T o overcome this problem, we ne ed a r obust Gaus- sian estimatio n (RGE) techniqu e that is o n ly slightly impacted by a sing le pair of imp ulse assignments ˆ φ m , ˆ φ n , so th at in e very loop we can approx imately consider the estimations of Gau ssian parameters rema in independ ent fro m the up date candidate. In this work, we applied the well-known and widely used median absolu te d e viation (MAD): MAD ( Z ) = med ia n n = 0 , 1 , . .., N − 1 ( | z i − median ( z ) | ) . (19) According to Rosseeuw and Cr oux [1 9], for Ga u ssian pr o - cesses there is σ Z ≈ 1 . 4826 × MAD ( Z ) . (20) C. Sp arsity-Sensitive Initializatio n An appr opriate blind selection of the in itial threshold T 0 is critical to the perfo rmance of the ITS algorithm , as when the starting point appr oaches towards the global optimum: • the risk of converging at a local m aximum decreases; • the time cost o f co mputation is reduced . It h as been re ported in [18] tha t the ”three-sigma ru le” [20] can be ap plied for ef fective b lin d detection of impulsive o utliers when combin ed with MAD: T 0 = 3 ˜ σ X = 4 . 4478 × MAD ( X ) . (21) This method has been derived as robust to sparse impulses. Howe ver , for general BG noises, when ρ increases to a relativ ely high le vel (e.g. over 1 perc e nt), the a mplitudes of impulse samples start to exhibit a significan t impact o n its perfo r mance. Therefor e , a co rrection with respect to the sparsity le vel of impulses is called f o r . Gen erally , T 0 should be raised to a h ig her level, when the impulses beco me sparser, i.e. when ρ decreases and/or σ 2 2 / σ 2 1 increases. In [ 2 1], Hurley and Rickar d have comparatively ev aluated sixteen different comm o n metr ics of spar sity , and their result strongly recom mends to deploy the Gini In dex, wh ich is normalized to [ 0 , 1 ] , sensiti ve to both th e density a n d the relativ e level of ou tlier s, and in variant to scaling o r clonin g. Giv en an sequence c = { c 0 , c 1 , . . . , c N − 1 } , we can define its sorting in the rising or d er as − → c = [ c ( 0 ) , c ( 1 ) , . . . , c ( N − 1 ) ] that c ( m ) ≤ c ( n ) ∀ 0 ≤ m < n ≤ N − 1 , (22) and the Gini index of c can b e calculated then as S ( c ) = 1 − 2 N Õ k = 0 − 1 c ( k ) | | c | | 1 N − k + 1 2 N ! , (23) where | | • | | 1 is the Manh attan no rm. As we ar e interested in the magnitu de of noise samples x rather than the raw amplitude, here we inv oke the Gini Index of | x | instead of x to realize a spa rsi ty-sensitive initia lization (SSI): T 0 = 10 S ( | x | ) ˜ σ X = 14 . 826 S ( | x | ) × MAD ( X ) . (24) V . N U M E R I C A L S I M U L A T I O N S T o verify and e valuate our prop o sed app roach, we carr ied out MA TLA B sim u lations. As test input, BG noise seque nces with len gth of N = 1 × 10 5 samples were generated with different parameters: σ 2 1 = 1 , σ 2 2 ∈ { 10 2 , 10 3 , 10 4 , 10 5 , 10 6 } , ρ ∈ { 1 × 10 − 4 , 3 × 10 − 4 , 1 × 10 − 3 , 3 × 10 − 3 , 1 × 10 − 2 } . For each un ique spe c ifica tio n, 100 times o f Monte-Carlo test we re executed to obtain the average imp ulse d e te c tion erro r r ates of T ype I and T ype I I . T o evaluate the conver ging performan ce, we also r e corded th e average nu mber of loops to converge. For referenc e , we also tested the perf o rmances of ITS when using mean absolute deviation for the Gaussian estimation in stead of the RGE, and when using simple ”th ree-sigma ru le” for the initialization instead of ou r SSI. The results are listed in T abs. I-III. As the num erical results show , our app roach of ITS with SSI and RGE appe a rs satisfying in most test c a ses, pr oviding low error ra te s and a go od con verging perfor mance. In the cases with low impulse power σ 2 2 , the T y pe II err o r rate is relatively high because some samples are determin ed as impu lses by the Bern o ulli process, but assigned with only lo w amplitude by the Gaussian process, a nd are hard to detect. An instance of this pheno menon is illustrated in Fig. 3 . Besides, it also worths to no te that bo th the SSI method and the RGE m ethod are clearly efficient in supp ressing the detection err o r rate and boosting the convergence. T ABLE I : T ype I Error Rate of the ITS Algorithm σ 2 2 ρ 1 × 10 − 4 3 × 10 − 4 1 × 10 − 3 3 × 10 − 3 1 × 10 − 2 2.79E-5 2.38E-5 2.98E-5 2.33E-5 1.25E-5 10 2 9.5E-6 1.43E-5 3.56E-5 1.001E-4 3.219E-4 0.2135 0.2124 0.2086 0.1982 0.1670 9.0E-6 1.20E-5 1.17E-5 8.8E-6 4.2E-6 10 3 3.7E-6 5.2E-6 1.18E-5 3.22E-5 7.62E-5 0.2121 0.2083 0.1956 0.1652 0.0984 8.0E-6 3.0E-6 3.2E-6 4.0E-6 3.2E-6 10 4 1.0E-6 0 4.4E-6 6.8E-6 1.48E-5 0.2076 0.1963 0.1613 0.0999 0.0265 3.2E-6 1.0E-6 1.7E-6 1.7E-6 2.0E-6 10 5 1.0E-6 0 1.0E-6 2.5E-6 4.4E-6 0.1955 0.1647 0.0976 0.0299 0.0036 1.0E-6 0 0 0 2.3E-6 10 6 0 0 0 0 1.7E-6 0.1646 0.1005 0.0354 0.0098 0.0025 Legend : RG E and SSI ; only SSI ; only RGE T ABLE II: T ype II Err or Rate of the ITS Algorithm σ 2 2 ρ 1 × 10 − 4 3 × 10 − 4 1 × 10 − 3 3 × 10 − 3 1 × 10 − 2 0.3863 0.3680 0.3292 0.3367 0.3453 10 2 0.3720 0.3462 0.3227 0.3078 0.2803 0.1214 0.1205 0.1046 0.1021 0.1089 0.1830 0.1292 0.1207 0.1154 0.1264 10 3 0.1678 0.1366 0.1121 0.1060 0.0995 0.0556 0.0496 0.0347 0.0351 0.0417 0.0773 0.0498 0.0426 0.0425 0.0438 10 4 0.0987 0.0586 0.0393 0.0383 0.0354 0.0303 0.0204 0.0158 0.0162 0.0192 0.0413 0.0228 0.0197 0.0164 0.0146 10 5 0.0529 0.0257 0.0172 0.0148 0.0125 0.0182 0.0140 0.0075 0.0082 0.0096 0.0143 0.0095 0.0091 0.0066 0.0053 10 6 0.0236 0.0150 0.0072 0.0055 0.0046 0.0178 0.0033 0.0055 0.0049 0.0043 Legend : RG E and SSI ; only SSI ; only RGE T ABLE III: A verage Conver ging Loops of the ITS Algorithm σ 2 2 ρ 1 × 10 − 4 3 × 10 − 4 1 × 10 − 3 3 × 10 − 3 1 × 10 − 2 3.41 3.90 3.13 2.67 8.66 10 2 1.59 2.94 10.07 37.72 193.47 2.7 3 3.4 4.4 5.9 4.12 3.60 3.02 2.01 15.28 10 3 1.09 1.41 4.03 16.64 118.71 2.7 2.8 3.6 7.2 20.5 3.69 2.85 3.02 1.85 15.13 10 4 1.06 1.03 2.15 11.06 98.02 2.6 3.2 6 37.5 978.5 2.58 1.52 1.12 2.20 8.59 10 5 1.02 1.05 1.86 9.45 95.35 2.8 3.4 33 1133.3 772.9 1.44 1.04 1.10 1.79 4.18 10 6 1.00 1.07 1.92 9.46 94.52 4.1 2.5 169.4 46 2.4 546.6 Legend : RG E and SSI ; only SSI ; only RGE V I . C O N C L U S I O N So far , in th is p aper we have pr esented a n ovel approach of blind im pulse detection fo r Berno ulli-Gaussian noise in 0 2 4 6 8 10 10 4 -30 -20 -10 0 10 20 30 Raw noise data Impulses Detected impulses Misditected impulses Fig. 3: A sample detection result of th e ITS algorithm with RGE and SSI. σ 2 1 = 1 , σ 2 2 = 10 2 , ρ = 1 × 10 − 3 . All misdetected im pulses are low in am plitude, not outly in g fr om the back g round no ise. undersp r ead channels, which requires no a priori knowledge about th e BG m odel param eters. Th e propo sed ITS algorithm has been math ematically der i ved as equ ivalent to the classical SMLR algo rithm un d er th e condition of unde rspread ch annel, with a significantly reduc ed computation al com plexity . The MAD-based robust Gau ssian estimation an d a n e w sparsity- sensiti ve thresho ld in itialization technique have b een applied, in order to enhance the detection acc u racy and boost the conv ergence. Th e efficiency of our appro a c h has been verified throug h nu m erical simula tio ns. As future work, it is of in terest to ge n eralize the pr oposed method for frequency-selective chan nels, in ord er to assist estimation of channel impulse response under pr e sen ce of impulsive noises, which can benefit various applica tio ns such as physical layer security [22], adap ti ve spread ing codes [23] and radio chan nel integrity monito ring [24]. A C K N O W L E D G M E N T This work was partly suppo rted by the German Ministry of Ed ucation and Research (BMBF) under gr ant 16KIS0 263K (HiFlecs). The authors would like to acknowledge the con- tributions of their colleague s. T h is in f ormation reflects the consortium ’ s v ie w , but the co nsortium is not liable for any use that may be made of any o f the inf ormation c o ntained therein. R E F E R E N C E S [1] S. Sharma, V . Bhatia, and A. Gupta , “Spa rsity Based UWB Recei ver Design in Additi ve Impulse Noise Channel s, ” in IEEE 17th Inte rnational W orkshop on Signal Pr ocessing Advances in W ir eless Communications (SP A WC) . IEEE, 2016, pp. 1–5. [2] M. G. Sanchez, I. Cuinas, and A. V . Alejos, “Interference and Im- pairment s in Radio Communication Systems Due to Indust rial Shot Noise, ” in IEEE Internatio nal Symposium on Industrial Electr onics (ISIE) . IEE E, 2007, pp. 1849–1854. [3] W . Henk el and T . Keßle r , “A Wide band Impulsi ve Noise Surve y in the German T elephone Network: Statistical Description and Modeling, ” Arc hiv f ¨ ur Elekt r onik und ¨ Ubertra gungstec hnik , vol. 48, pp. 277–277, 1994. [4] B. Han, V . Stoica, C. Kaiser , N. Otterba ch, and K. Dostert, “Noise Charac terizat ion and Emulation for Low-V ol tage Powe r Line Channels Across Narro wband and Broadband, ” Digita l Signal Pr ocessing , vol. 69, pp. 259–274, 2017. [5] A. Osseiran, F . Boccardi, V . Braun, K. Kusume, P . Marsch, M. Maternia, O. Queseth, M. Schellmann, H. Schotten, H. T aoka et al. , “Scena rios for 5G Mobile and W irele ss Comm unic ations: the V ision of the METIS Project , ” IEEE Communicati ons Magazin e , vol. 52, no. 5, pp. 26–35, 2014. [6] C. Bock elmann, A. Dekorsy , A. Gnad, L. Rauchhaupt , A. Neumann , D. Block, U. Meier , J. Rust, S. Paul, F . Mackent hun et al. , “Hiflecs: In- nov ati ve T echnol ogies for L o w-Latenc y W ireless Closed-Loop Industrial Automatio n Systems, ” 22. VDE-ITG-F achtagun g Mobilk ommunikati on , 2017. [7] D. Middleton, “Procedures for Determining the Para meters of the First- Order Canonic al Models of Class A and Class B Electromagnet ic Inter- ference , ” IEEE T ransac tions on Electr omagne tic Compatibi lity , no. 3, pp. 190–208, 1979. [8] C. L. Nikias and M. Shao, Signal Pr ocessing with Alpha-Stable Distri- buti ons and A pplic ations . W ile y-Inter science, 1995. [9] T . Shongwe, A. J. H. V inck, and H. C. Ferreira, “A Study on Impulse Noise and Its Models, ” SAIEE Africa Researc h J ournal , vol. 106, no. 3, pp. 119–131, 2015. [10] J. Kormylo and J. Mende l, “Maximum Lik elihood Detect ion an d Estimation of Bernoull i-Gaussian Processes, ” IEEE T ransact ions on Informatio n Theory , vol. 28, no. 3, pp. 482–488, 1982. [11] M. L av ielle, “Bayesian D econ volut ion of Bernoulli-Gaussia n Processes, ” Signal Pr ocessing , vol . 33, no. 1, pp. 67–79, 1993. [12] F . Champagnat , Y . Goussard, and J. Idier , “Unsupervise d Decon volution of Sparse Spike Tra ins Using Stochastic Approximation, ” IEE E T rans- actions on Signal Pr ocessing , vol . 44, no. 12, pp. 2988–2998, 1996. [13] Soussen, Charles, et al. “From Bernoul li-Gaussian Decon volu tion to Sparse Signal Restorat ion. ’’ IEEE T ransac tions on Signal Proce ssing , vol. 59, no. 10, pp. 4572–4584, 2011. [14] J. M. Mendel, Optimal Seismic Decon volu tion: an Estimati on-Based Appr oach . Else vier , 2013. [15] V . Raghav an, G. Harihar an, and A. M. Sayeed, “Capa city of Sparse Multipa th Cha nnels in the Ultra-W ideband Regime, ” IEEE J ournal of Selec ted T opics in Signal Processi ng , vol. 1, no. 3, pp. 357–371, 2007. [16] F . Canete, L. Diez, J. A. Cortes, J. J. Sanchez-Martin ez, and L. M. T orres, “Time-V arying Channel E mulato r for Indoor Power Line Com- municati ons, ” in 2008 IEEE Global T ele communicat ions Confer ence (GLOBECOM) . IE EE, 2008, pp. 1–5. [17] M. Zimmermann and K. Dostert, “An Analysis of the Broadband Noise Scenario in Po werline Networks, ” in Intern ational Symposium on P owerline Communicatio ns and its A pplic ations (ISPLC) . IEEE, 2000, pp. 5–7. [18] B. Han, M. Muma, M. Feng, and A. M. Zoubir , “An Online Approach for Intracra nial Pressure Foreca sting Based on Signal Decomposition and Robust Stati stics, ” in 2013 IEEE International Confer ence on Acoustics, Speec h and Signal Pr ocessing (ICASSP) . IE E E, 2013, pp. 6239–6243. [19] P . J. Rousseeuw and C. Croux, “Alter nati ves to the Median Absolute De viation , ” Jou rnal of the American Statistic al association , vol. 88, no. 424, pp. 1273–1283, 1993. [20] E. W . Grafa rend, Linear and Nonlin ear Models: Fix ed E ff ects, Random Effec ts, and Mixed Models . de Gruyter , 2006. [21] N. Hurle y and S . Rickard, “Comparing Measures of Sparsity, ” IEEE T ransactions on Information Theory , v ol. 55, no. 10, pp. 4723–4741 , 2009. [22] A. Ambekar , M. Hassan, and H. D. Schott en, “Improvin g Channel Reci- procity for Effe cti ve K ey Manage ment Systems, ” in 2012 Internat ional Symposium on Signals, Systems, and Electr onics (ISSSE) . IEEE , 2012, pp. 1–4. [23] A. K. Ambekar and H. D. Schotten, “Channel-Depe ndent Adaptation Scheme for Spreading Codes in DS-CDMA, ” in 2010 E ur opean W irele ss Confer ence (EW) . IE EE, 2010, pp. 519–522. [24] A. W einand, M. Karrenbauer , R. Sattiraj u, and H. Schotte n, “ Applicatio n of Machine Learning for Channel based Message Authenti cation in Mission Criti cal Machine T ype Communica tion, ” in Pr oceed ings of Eur opean W ire less 2017 . VDE, 2017, pp. 1–5.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment