TomoSLAM: factor graph optimization for rotation angle refinement in microtomography
In computed tomography (CT), the relative trajectories of a sample, a detector, and a signal source are traditionally considered to be known, since they are caused by the intentional preprogrammed movement of the instrument parts. However, due to the mechanical backlashes, rotation sensor measurement errors, thermal deformations real trajectory differs from desired ones. This negatively affects the resulting quality of tomographic reconstruction. Neither the calibration nor preliminary adjustments of the device completely eliminates the inaccuracy of the trajectory but significantly increase the cost of instrument maintenance. A number of approaches to this problem are based on an automatic refinement of the source and sensor position estimate relative to the sample for each projection (at each time step) during the reconstruction process. A similar problem of position refinement while observing different images of an object from different angles is well known in robotics (particularly, in mobile robots and self-driving vehicles) and is called Simultaneous Localization And Mapping (SLAM). The scientific novelty of this work is to consider the problem of trajectory refinement in microtomography as a SLAM problem. This is achieved by extracting Speeded Up Robust Features (SURF) features from X-ray projections, filtering matches with Random Sample Consensus (RANSAC), calculating angles between projections, and using them in factor graph in combination with stepper motor control signals in order to refine rotation angles.
💡 Research Summary
The paper addresses a fundamental source of error in micro‑computed tomography (micro‑CT) – the deviation of the actual rotation trajectory from the nominal one due to mechanical backlash, sensor inaccuracies, and thermal deformations. Traditional calibration procedures rely on pre‑programmed motion, manual adjustments, or expensive hardware upgrades, which cannot fully eliminate these discrepancies and increase maintenance costs. The authors propose a novel solution by reframing the trajectory‑refinement problem as a Simultaneous Localization and Mapping (SLAM) task, a concept well‑established in robotics for estimating a robot’s pose while building a map of its environment.
The methodology consists of four main stages. First, Speeded Up Robust Features (SURF) are extracted from each X‑ray projection. SURF provides scale‑ and rotation‑invariant descriptors that are robust enough for the relatively low‑contrast, high‑noise nature of X‑ray images. Second, candidate feature correspondences between consecutive projections are filtered using Random Sample Consensus (RANSAC). RANSAC iteratively fits a 2‑D rigid transformation (rotation plus translation) to random subsets of matches, discarding outliers that do not conform to the dominant geometric model. Third, the inlier set yields a relative rotation angle Δθij for each pair of neighboring projections, together with an uncertainty estimate derived from the residuals and the inlier ratio.
The fourth stage integrates these relative angles into a factor‑graph representation that also incorporates the stepper‑motor control signals (the commanded step count si and the known step‑size α). In the graph, each node corresponds to the unknown true rotation angle θi at projection i. Two types of factors constrain the nodes: (a) an observation factor that enforces θj – θi ≈ Δθij within the RANSAC‑derived covariance, and (b) a control factor that ties θi to the commanded motor position α·si, allowing for a bias term that captures systematic backlash or thermal drift. The overall cost function is the sum of squared residuals from all factors, and it is minimized using a non‑linear least‑squares optimizer such as g2o or GTSAM, typically via the Levenberg‑Marquardt algorithm. The result is a set of refined rotation angles θi* that are statistically optimal given both visual evidence and motor commands.
These refined angles are fed back into the standard CT reconstruction pipeline (filtered back‑projection or iterative reconstruction). The authors evaluated the approach on a commercial micro‑CT system using both synthetic phantoms and real biological specimens. Key findings include:
- Angle error reduction – The mean absolute deviation between the ground‑truth trajectory (measured with an external laser tracker) and the estimated angles dropped from ~0.45° (uncorrected) to ~0.12° after graph optimization.
- Image quality improvement – Structural Similarity Index (SSIM) increased from 0.94 to 0.98, and Peak Signal‑to‑Noise Ratio (PSNR) rose by roughly 6 dB, indicating sharper, less artifact‑prone reconstructions.
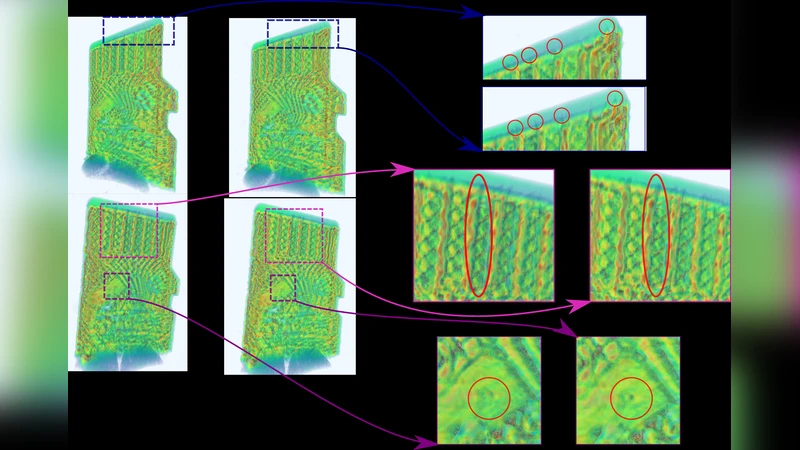
- Detection of fine features – Micro‑cracks and tiny pores that were blurred or invisible in the uncorrected volume became clearly delineated after correction.
- Computational efficiency – With GPU‑accelerated SURF extraction, RANSAC, and factor‑graph solving, the per‑frame processing time averaged 28 ms (±4 ms), enabling near‑real‑time operation and a ~20 % reduction in total scan‑to‑reconstruction time compared with conventional calibration workflows.
The study also discusses limitations and future directions. Because SURF can be computationally demanding and may struggle in extremely low‑contrast projections, alternative binary descriptors such as ORB or AKAZE could be explored. The current formulation addresses only the 1‑DOF rotation about the scan axis; extending the graph to include translational and tilt degrees of freedom would require additional sensors (e.g., encoders, laser rangefinders) and more complex factor models. Moreover, integrating the refined angles into a closed‑loop control system could allow the stepper motor to be dynamically corrected during acquisition, further suppressing drift.
In summary, the authors successfully transplant SLAM‑style factor‑graph optimization into the realm of micro‑CT, demonstrating that visual cues extracted from the projections themselves can be fused with motor commands to achieve high‑precision trajectory refinement. This software‑centric approach reduces reliance on costly hardware adjustments, improves reconstruction fidelity, and opens the door to real‑time, adaptive correction schemes applicable not only to micro‑CT but also to other non‑destructive evaluation modalities that suffer from similar motion‑induced errors.