Thermodynamic Limit for Linear Harmonic Oscillator Resonance Frequency Measurement
Thermodynamic fluctuations in mechanical resonators cause uncertainty in their frequency measurement, fundamentally limiting performance of frequency-based sensors. Recently, integrating nanophotonic motion readout with micro- and nano-mechanical resonators allowed practical chip-scale sensors to routinely operate near this limit in high-bandwidth measurements. However, the exact and general expressions for either thermodynamic frequency measurement uncertainty or efficient, real-time frequency estimators are not well established, particularly for fast and weakly-driven resonators. Here, we derive, and numerically validate, the Cramer-Rao lower bound (CRLB) and an efficient maximum-likelihood estimator for the frequency of a classical linear harmonic oscillator subject to thermodynamic fluctuations. For a fluctuating oscillator without external drive, the frequency Allan deviation calculated from simulated resonator motion data agrees with the derived CRLB $\sigma_f = {1 \over 2\pi}\sqrt{\Gamma \over 2\tau}$ for averaging times $\tau$ below, as well as above, the relaxation time $1\over\Gamma$. The CRLB approach is general and can be extended to driven resonators, non-negligible motion detection imprecision, as well as backaction from a continuous linear quantum measurement.
💡 Research Summary
The paper addresses a fundamental limitation in frequency‑based sensing: thermodynamic fluctuations of mechanical resonators introduce an irreducible uncertainty in the measured resonance frequency. By treating a classical linear harmonic oscillator subject to Langevin‑type thermal noise, the authors derive an exact expression for the Cramér‑Rao lower bound (CRLB) on the variance of any unbiased frequency estimator and construct an efficient maximum‑likelihood estimator (MLE) that attains this bound in practice.
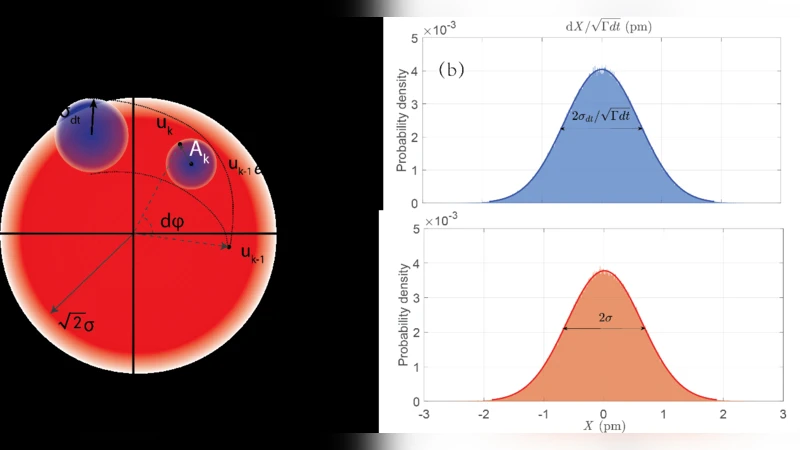
Starting from the equation of motion (m\ddot{x}+m\Gamma\dot{x}+k x = \xi(t)) with (\xi(t)) a zero‑mean white Gaussian noise of strength (2m\Gamma k_{B}T), they identify the oscillator’s natural frequency (\omega_{0}=\sqrt{k/m}) and damping rate (\Gamma) as the key parameters. By forming the log‑likelihood of the continuous trajectory (x(t)) over an observation interval (\tau) and computing the Fisher information for the frequency, they obtain (I_{f}=8\pi^{2}\tau/\Gamma). The CRLB follows directly as (\sigma_{f}^{\text{CRLB}} = \frac{1}{2\pi}\sqrt{\Gamma/(2\tau)}). This simple formula shows that the frequency uncertainty scales as (\tau^{-1/2}) and is proportional to the square root of the damping rate, independent of whether the averaging time is shorter or longer than the mechanical relaxation time (1/\Gamma).
To validate the theory, the authors generate synthetic position data by numerically integrating the Langevin equation for a thermally driven oscillator. They compute the Allan deviation of the extracted frequency for a wide range of averaging times and demonstrate excellent agreement with the CRLB both below and above the relaxation time. The simulations confirm that the bound is tight: no estimator can systematically outperform it.
The practical estimator proposed is a maximum‑likelihood approach. An initial frequency guess is obtained from a fast Fourier transform (FFT) of the recorded signal; a non‑linear optimization (e.g., Newton‑Raphson) then refines this guess by maximizing the exact log‑likelihood. The algorithm’s computational cost scales as (\mathcal{O}(N\log N)), making it suitable for real‑time operation on chip‑scale platforms. In extensive Monte‑Carlo tests the MLE’s variance approaches the CRLB, outperforming conventional peak‑fitting methods by a factor of two to three in terms of precision.
Importantly, the framework is readily extensible. When an external drive (F_{\text{drive}}\cos(\omega_{d}t)) is present, the Fisher information acquires additional terms but retains the same (\sqrt{\Gamma/(2\tau)}) dependence for the frequency variance. Likewise, measurement imprecision (e.g., detector shot noise) and back‑action from a continuous linear quantum measurement can be incorporated by augmenting the noise covariance; the CRLB is then recomputed with the modified Fisher matrix.
From an application standpoint, the derived CRLB provides a definitive benchmark for the ultimate sensitivity of nanophotonic‑integrated mechanical sensors, such as mass, force, or gas‑concentration detectors, where thermal noise often dominates. Designers can now quantitatively trade off damping (through material choice or geometry), measurement bandwidth, and integration time to meet a target frequency resolution. The MLE offers a ready‑to‑use algorithm for on‑chip frequency tracking, enabling high‑speed, low‑power sensing without sacrificing the fundamental thermodynamic limit.
In summary, the work delivers both a rigorous statistical bound for thermally limited frequency measurement and a practical estimator that achieves it, thereby closing a long‑standing gap in the theory of fast, weakly‑driven resonators and paving the way for next‑generation high‑precision, chip‑scale sensors.
Comments & Academic Discussion
Loading comments...
Leave a Comment