Evacuation Route Planning for Alternative Fuel Vehicles
As the number of adopted alternative fuel vehicles increases, it is crucial for communities (especially those that are susceptible to hazards) to make evacuation plans that account for such vehicles refueling needs. During emergencies that require preemptive evacuation planning, travelers using alternative fuel vehicles are vulnerable when evacuation routes do not provide access to refueling stations on their way to shelters. In this paper, we formulate and solve a novel seamless evacuation route plan problem, by designing $k$-minimum spanning trees with hop constraints that capture the refueling needs of each $k \in K$ vehicle fuel type on their way to reach a shelter. We develop a branch-and-price algorithm based on a matheuristic column generation approach to solve the evacuation problem. We apply the proposed framework to the Sioux Falls transportation network with existing infrastructure deployment and present numerical experiments. Specifically, we discuss the evacuation travel and refueling times under scenarios of various alternative fuel vehicles driving ranges. Our findings show that the characteristics of each vehicle fuel type, like driving range and the refueling infrastructure topology, play a pivotal role in determining evacuation route plans. This means that an evacuation route could prove unique to a single vehicle fuel type, while being infeasible to the others. Finally, we observe that the driving range constraints could force evacuee vehicles to detour to meet their refueling needs before reaching safety and increase the total evacuation time by 7.32 % in one of the evaluated scenarios.
💡 Research Summary
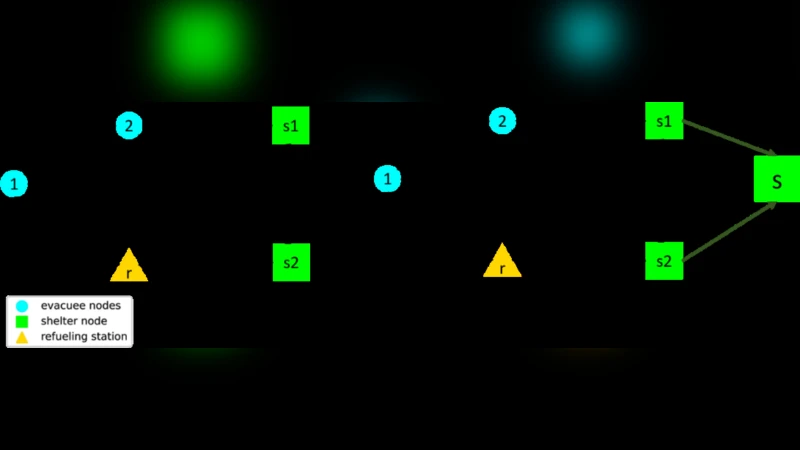
This paper addresses a critical gap in disaster‑evacuation planning: the growing presence of alternative‑fuel vehicles (AFVs) such as electric, hydrogen, and bio‑fuel cars, whose limited driving ranges and sparse refueling infrastructure make them vulnerable during large‑scale evacuations. Traditional evacuation models assume conventional internal‑combustion vehicles and ignore the need for intermediate charging or refueling stops. To capture these realities, the authors formulate a novel “k‑minimum spanning tree with hop constraints” (k‑MST‑HC) problem. For each fuel type k ∈ K, a spanning tree connects the origin community to designated shelters while ensuring that the number of hops (i.e., the number of charging or refueling events) does not exceed a limit derived from the vehicle’s maximum range. The hop limit effectively forces any feasible route to include enough refueling stations so that the vehicle never exceeds its range between stops.
Because the k‑MST‑HC problem is NP‑hard, the authors develop a branch‑and‑price framework enhanced with a matheuristic column‑generation scheme. The master problem selects a set of candidate trees (columns) that together cover all shelters at minimum total travel time. The sub‑problem generates new columns by solving a constrained k‑MST routing problem; a Lagrangian relaxation introduces price variables, and a label‑setting algorithm respects the hop constraint while seeking low‑cost trees. Rather than exhaustive enumeration, the column generator uses a heuristic‑driven exact method: an initial greedy construction creates a feasible tree, followed by local search (2‑opt and edge exchanges) and iterative price updates. This hybrid approach yields high‑quality solutions with modest computational effort.
The methodology is tested on the Sioux Falls transportation network (≈200 nodes, 400 edges) using the actual locations of charging and fueling stations. Three AFV categories are examined: electric vehicles (range ≈ 150 km), hydrogen fuel‑cell vehicles (≈ 300 km), and bio‑fuel vehicles (≈ 200 km). Four shelters are designated, and for each fuel type the authors compare the evacuation time of the k‑MST‑HC solution against the unconstrained shortest‑path baseline. Results reveal stark differences across fuel types. Electric vehicles, constrained by a sparse charging‑station network, experience an average evacuation‑time increase of 7.32 % due to required detours for recharging. Hydrogen vehicles, benefitting from a denser refueling infrastructure, incur virtually no additional delay (<1 %). Bio‑fuel vehicles fall in between, with a roughly 3 % increase. Moreover, the study shows that a route feasible for one fuel type can be infeasible for another, underscoring the need for fuel‑type‑specific evacuation maps.
Sensitivity analyses demonstrate that modest infrastructure investments (e.g., adding a few strategically placed charging stations) can reduce the electric‑vehicle time penalty from 7.32 % to under 4 %. The authors argue that emergency planners should incorporate AFV characteristics into evacuation drills, develop customized routing guidance, and prioritize the placement of refueling assets in high‑risk communities.
The paper concludes by highlighting its contributions: (1) a mathematically rigorous model that integrates vehicle range and refueling constraints into evacuation routing, (2) a scalable branch‑and‑price‑matheuristic algorithm capable of solving realistic networks, and (3) quantitative evidence that refueling infrastructure topology critically influences evacuation efficiency. Limitations include the static network assumption (no road closures or real‑time congestion), fixed average refueling times, and a single‑shelter destination per scenario. Future work is proposed on dynamic traffic conditions, multi‑shelter selection, stochastic fuel‑availability modeling, and cost‑benefit analyses of infrastructure upgrades.
Overall, the study provides both a theoretical framework and a practical decision‑support tool for municipalities aiming to safeguard the growing fleet of alternative‑fuel vehicles during emergencies.
Comments & Academic Discussion
Loading comments...
Leave a Comment