Simultaneous model calibration and source inversion in atmospheric dispersion models
We present a cost-effective method for model calibration and solution of source inversion problems in atmospheric dispersion modelling. We use Gaussian process emulations of atmospheric dispersion models within a Bayesian framework for solution of inverse problems. The model and source parameters are treated as unknowns and we obtain point estimates and approximation of uncertainties for sources while simultaneously calibrating the forward model. The method is validated in the context of an industrial case study involving emissions from a smelting operation for which cumulative monthly measurements of zinc particulate depositions are available.
💡 Research Summary
The paper presents a novel, computationally efficient methodology for simultaneously calibrating atmospheric dispersion models and solving source inversion problems. The forward model is based on the advection‑diffusion partial differential equation (PDE) that describes the transport of particulate pollutants. The model contains two sets of unknowns: (i) the source emission rates q for a set of point sources with known locations, and (ii) a vector of model parameters θ (e.g., roughness length, Monin‑Obukhov length, Pasquill stability class) that govern wind fields and turbulent diffusion. Measurements of deposited mass on the ground are linear functionals of the concentration field, which can be written compactly as w = A(θ) q, where A(θ) is a d × n matrix that maps source strengths to observable quantities. While A(θ) is linear in q, it depends non‑linearly on θ, and each evaluation of A(θ) requires solving the expensive PDE.
To avoid repeated PDE solves, the authors construct Gaussian‑process (GP) emulators for every entry a_ij(θ) of the matrix A(θ). A set of design points {θ_k} is generated using a Latin Hypercube Design (LHD) as an initial space‑filling sample, which is then refined with a maximin criterion via a particle‑swarm optimizer. For each entry, a GP with an isotropic kernel is conditioned on the training data a_ij(θ_k), yielding a predictive mean \bar g_ij(θ) that serves as the emulator and a predictive variance that quantifies emulator uncertainty. This approach dramatically reduces the computational burden while preserving a rigorous quantification of approximation error.
Within a Bayesian framework, prior distributions are assigned to θ and q. The likelihood models the discrepancy between observed data w and the GP‑predicted forward map \hat A(θ) q, assuming additive Gaussian measurement noise. Posterior inference for the joint vector (θ, q) is performed using Markov Chain Monte Carlo (MCMC), which simultaneously yields point estimates (e.g., posterior means or MAP) and credible intervals for both model parameters and source strengths. The method thus provides a full probabilistic description of uncertainty, unlike traditional deterministic inverse‑modelling techniques that only give point estimates.
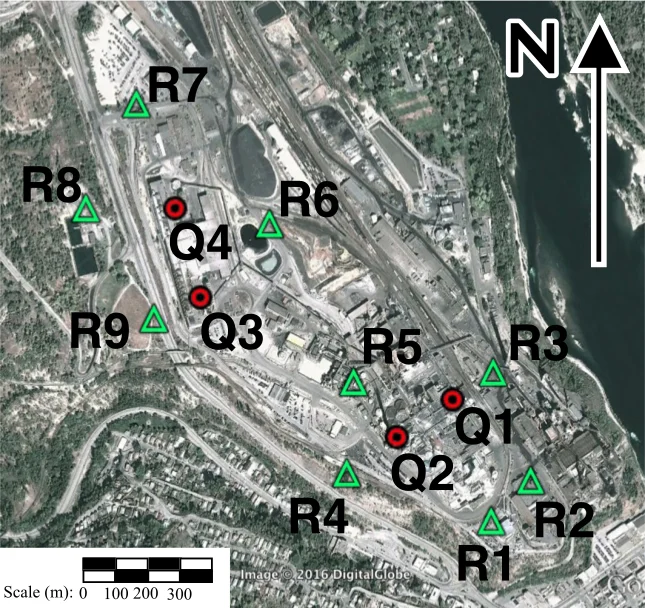
The methodology is validated on a real‑world case study: a lead‑zinc smelter in Trail, British Columbia, Canada. Monthly measurements of zinc particulate deposition were available from a network of ground‑level collectors. The authors compare their Bayesian‑GP results with earlier engineering estimates and with a deterministic Gaussian‑plume inversion. The calibrated θ values (e.g., roughness length and stability parameters) differ from the heuristic values traditionally used, leading to a forward model that matches the observed deposition patterns more closely. The posterior distribution of the emission rates q yields credible intervals that encompass the engineering estimates but also reveal the degree of uncertainty inherent in the data and model. Importantly, the GP‑based approach reduces the total computational time from many hours of PDE solves to a few minutes of emulator evaluations plus MCMC sampling.
Key contributions of the paper are: (1) a GP‑based emulation strategy that efficiently approximates a high‑fidelity atmospheric dispersion PDE; (2) a robust experimental‑design scheme combining LHD and maximin designs to ensure accurate emulation across the parameter space; (3) a fully Bayesian inversion that jointly estimates model calibration parameters and source strengths while providing rigorous uncertainty quantification; and (4) a demonstration on an industrial-scale problem showing improved fit and practical feasibility. The authors argue that the framework is readily extensible to other pollutants, more complex source configurations, and real‑time monitoring scenarios where rapid inference is essential.
Comments & Academic Discussion
Loading comments...
Leave a Comment