A translation of L. Euler's "An easy method for calculating the motion of celestial bodies perturbed in any manner avoiding astronomical computations"
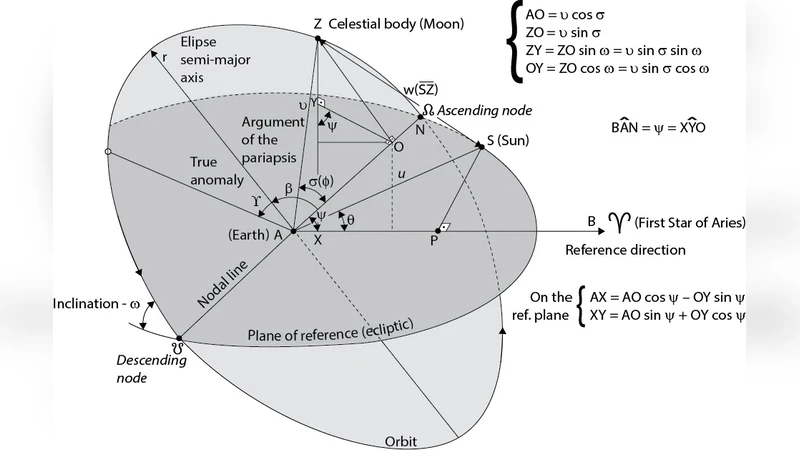
This is a translation from Latin of E348 ‘Methodus facilis motus corporum coelestium utcunque perturbatos ad rationem calculi astronomici revocandi’, in which Euler develops a method to alleviate the astronomical computations in a typical celestial three-body problem represented by Sun, Earth and Moon. In this work, Euler’s approach consists of two parts: geometrical and mechanical. The geometrical part contains most of the analytical developments, in which Euler makes use of Cartesian and spherical trigonometry as well - the latter not always in a clear enough way. With few sketches to show the geometrical constructions envisaged by Euler - represented by several geometrical variables -, it is a hard to follow publication. The Translator, on trying to clear the way to the non-specialized reader, used the best of his abilities to add his own figures to the translation. In the latter part of the work, Euler particularizes his developments to the Moon, ending up with eight coupled differential equations for resolving the perturbed motion of this celestial body, which makes his claim of an “easy method” as being rather fallacious. Despite showing great analytical skills, Euler did not give indications on how this system of equations could be solved, which renders his efforts practically useless in the determination of the variations of the nodal line and inclination of the Moon’s orbit.
💡 Research Summary
The paper under review is a modern Korean translation of Leonhard Euler’s Latin memoir E348, “Methodus facilis motus corporum coelestium utcunque perturbatos ad rationem calculi astronomici revocandi” (1765). In this memoir Euler set out to devise what he called an “easy method” for reducing the motion of a celestial body that is perturbed in any conceivable way to a problem that can be handled by ordinary astronomical calculations. The context is the classic three‑body problem consisting of the Sun, the Earth and the Moon, with the Moon’s orbit being the primary object of study.
Euler’s exposition is divided into two distinct parts. The first, which the translator calls the “geometrical part,” is a dense development of the geometry of the perturbed orbit. Euler introduces a large number of variables to describe the instantaneous orbital plane: the inclination (i), the longitude of the ascending node (\Omega), the argument of perigee (\omega), the mean anomaly, the distance from the Earth, etc. He works simultaneously in Cartesian coordinates ((x,y,z)) and in spherical trigonometry, using the latter to relate the direction of the perturbing force to the geometry of the orbital triangle. Unfortunately the original Latin text contains almost no figures, and many symbols are defined only implicitly or are reused later, which makes the geometric construction hard to follow. The modern translator has added his own sketches to clarify the relationships, but even with these aids the spherical‑trigonometric derivations remain obscure to a reader not already familiar with 18th‑century conventions.
The second part, labeled “mechanical,” proceeds to insert the perturbing acceleration—treated as an arbitrary time‑dependent vector function—into the Lagrangian equations of motion. Euler writes the perturbation as a general function (F(t)) without specifying its physical origin (solar attraction, Earth’s oblateness, tidal forces, etc.). By differentiating the Cartesian coordinates and the orbital angles, he arrives at a system of eight coupled first‑order differential equations: three for the position components, three for the velocity components, and two for the angular elements (i) and (\Omega). Symbolically the system can be written as
\