Adaptive MPC under Time Varying Uncertainty: Robust and Stochastic
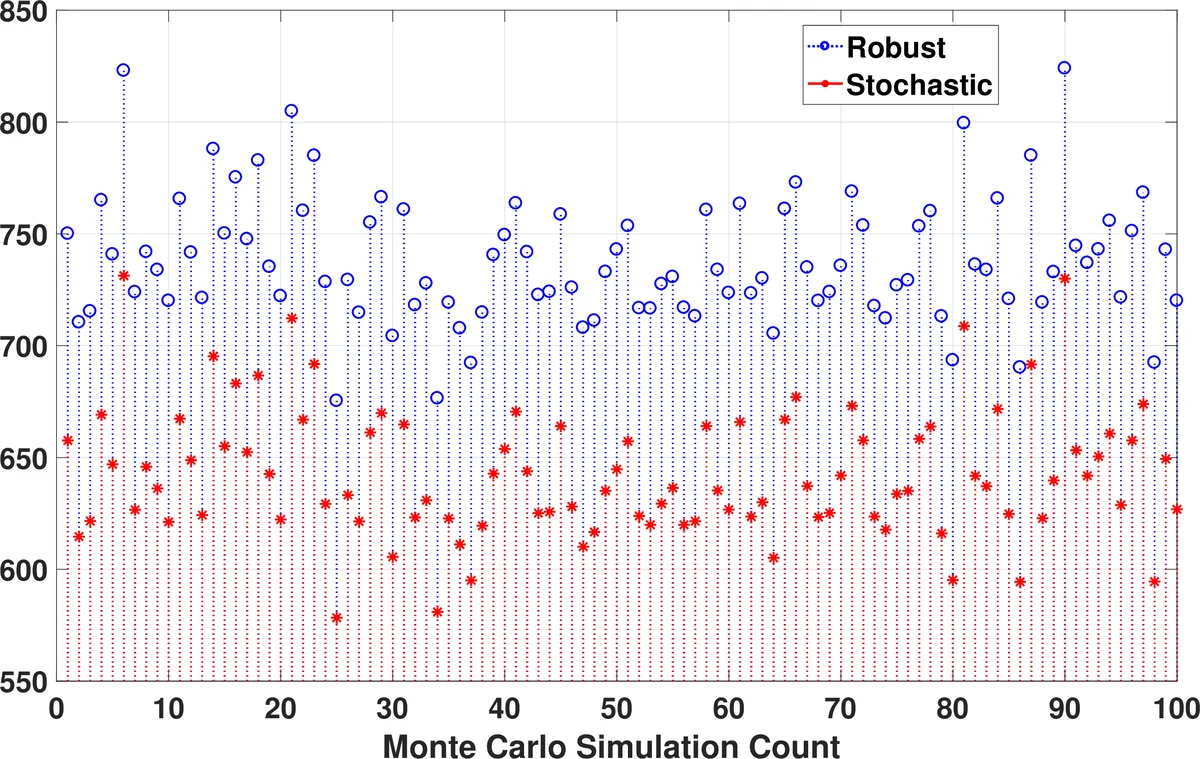
This paper deals with the problem of formulating an adaptive Model Predictive Control strategy for constrained uncertain systems. We consider a linear system, in presence of bounded time varying additive uncertainty. The uncertainty is decoupled as the sum of a process noise with known bounds, and a time varying offset that we wish to identify. The time varying offset uncertainty is assumed unknown point-wise in time. Its domain, called the Feasible Parameter Set, and its maximum rate of change are known to the control designer. As new data becomes available, we refine the Feasible Parameter Set with a Set Membership Method based approach, using the known bounds on process noise. We consider two separate cases of robust and probabilistic constraints on system states, with hard constraints on actuator inputs. In both cases, we robustly satisfy the imposed constraints for all possible values of the offset uncertainty in the Feasible Parameter Set. By imposing adequate terminal conditions, we prove recursive feasibility and stability of the proposed algorithms. The efficacy of the proposed robust and stochastic Adaptive MPC algorithms is illustrated with detailed numerical examples.
💡 Research Summary
The paper proposes a unified adaptive Model Predictive Control (MPC) framework for linear systems subject to bounded additive uncertainty that consists of a known‑bound process noise and a time‑varying offset term. The offset is unknown point‑wise in time, belongs to a known polytope Ω, and its rate of change is bounded by a known set P. The key idea is to maintain a “Feasible Parameter Set” (FPS) that contains all admissible values of the offset given the data collected so far. Using a set‑membership approach, the FPS is updated at each sampling instant by intersecting the initial polytope with linear inequalities derived from the latest state measurement, the applied input, the known noise bounds, and the rate‑of‑change constraints. The authors prove that the FPS never becomes empty and always contains the true offset (Proposition 1).
Two constraint handling scenarios are considered: (i) robust state constraints (C x + D u ≤ b) together with hard input limits, and (ii) chance constraints on the state (P(G x ≤ h) ≥ 1 − α) together with hard input limits. In both cases the MPC problem is solved over a finite horizon N in a receding‑horizon fashion, but the constraints must hold for every possible offset in the current FPS and for every admissible noise realization (robust case) or with a prescribed violation probability (stochastic case). Predicted FPSs Θ_{k|t} are constructed for each future step k ∈
Comments & Academic Discussion
Loading comments...
Leave a Comment