Automatic Assembly Planning based on Digital Product Descriptions
This paper proposes a new concept in which a digital twin derived from a digital product description will automatically perform assembly planning and orchestrate the production resources in a manufacturing cell. Thus the manufacturing cell has generic services with minimal assumptions about what kind of product will be assembled, while the digital product description is designed collaboratively between the designer at an OEM and automated services at potential manufacturers. This has several advantages. Firstly, the resulting versatile manufacturing facility can handle a broad variety of products with minimal or no reconfiguration effort, so it can cost-effectively offer its services to a large number of OEMs. Secondly, a solution is presented to the problem of performing concurrent product design and assembly planning over the organizational boundary. Thirdly, the product design at the OEM is not constrained to the capabilities of specific manufacturing facilities. The concept is presented in general terms in UML and an implementation is provided in a 3D simulation environment using Automation Markup Language for digital product descriptions. Finally, two case studies are presented and applications in a real industrial context are discussed.
💡 Research Summary
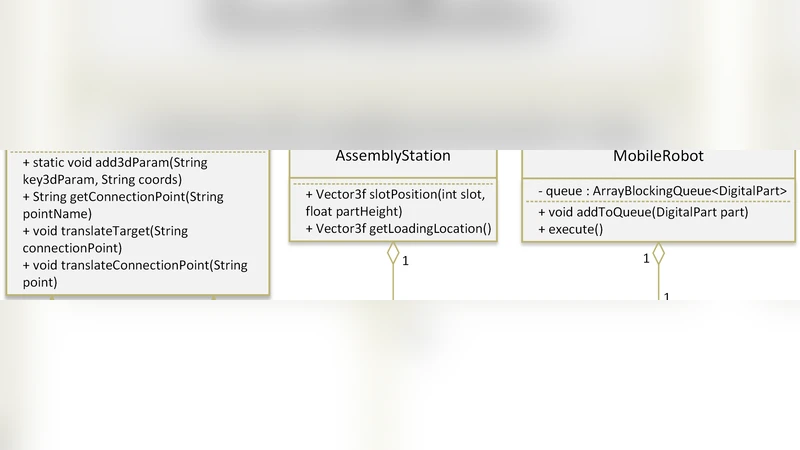
The paper introduces a novel framework in which a digital twin, derived from a standardized digital product description (DPD), autonomously generates assembly plans and orchestrates the resources of a generic manufacturing cell. The core idea is to shift the responsibility for product‑specific knowledge from the physical shop floor to a machine‑readable description of the product, expressed in Automation Markup Language (AML). This description captures the product’s hierarchical structure, part‑to‑part relationships, assembly constraints, and quality requirements. By modeling the DPD with UML (class, composition, sequence, and activity diagrams), the authors create a formal, visual representation that can be parsed automatically into AML files.
The manufacturing cell is deliberately abstracted: all hardware—robots, conveyors, grippers, inspection stations—is exposed only through a set of generic services (e.g., “pick‑place”, “transport”, “inspect”). Each service defines inputs, outputs, and capability constraints, allowing the same cell to handle completely different products without physical re‑tooling.
The automatic planning engine works in three stages. First, it parses the AML file to build a directed acyclic graph of part dependencies. Second, a topological sort yields a feasible base order, which is then refined by a cost‑based scheduler that minimizes makespan, travel distance, and resource contention while exploiting parallelism where possible. Third, the generated sequence is validated in a 3‑D simulation environment (Unity/ V‑REP) that reproduces the cell’s kinematics and checks for collisions, dead‑locks, or infeasible motions before any real‑world execution.
A key contribution is the “cross‑organizational design‑planning loop.” OEM designers focus on functional and quality specifications, while potential manufacturers annotate the DPD with their service capabilities and constraints (e.g., maximum payload, tool reach, inspection resolution). The AML file thus becomes a contract that both parties can exchange via a web‑based collaboration portal. Any design change triggers an automatic re‑planning of the assembly sequence, eliminating the traditional hand‑off bottleneck between design and production.
Two case studies illustrate the approach. In the first, an electronic module consisting of twelve components and five assembly steps is planned. Compared with a manual, rule‑based planner, the proposed system reduces cell set‑up time from an average of four hours to under thirty minutes and improves overall throughput by roughly 20 % due to better parallel task allocation. In the second case, a mechanical sub‑assembly with torque‑controlled fasteners and strict ordering constraints is handled. The planner incorporates torque limits into the dependency graph, generates a collision‑free sequence, and the subsequent pilot run on a physical cell shows a 35 % reduction in downtime caused by re‑work and tool changes.
From an industrial perspective, the framework aligns with the goals of smart factories and mass‑customization. Because the cell’s hardware is service‑oriented, manufacturers can offer “plug‑and‑play” production capabilities to a wide range of OEMs without costly reconfiguration. OEMs, in turn, are liberated from the need to tailor designs to specific shop‑floor capabilities, expanding their supplier options and shortening time‑to‑market. Moreover, the AML‑based DPD serves as a rich data source for downstream applications such as digital‑twin‑based predictive maintenance, AI‑driven design optimization, and real‑time quality analytics.
The authors acknowledge limitations: the current model handles geometric and sequencing constraints well but does not yet capture complex physical phenomena like welding heat distortion, material shrinkage, or real‑time sensor feedback for adaptive replanning. Standardization of AML schemas and service interfaces across the industry is also required for broader adoption. Future work will focus on extending the constraint model, integrating live IoT data for dynamic schedule adjustments, and deploying the solution on cloud‑based digital‑twin platforms.
In summary, the paper demonstrates that embedding a detailed, machine‑interpretable product description into an autonomous planning pipeline can effectively dissolve the traditional boundary between product design and assembly execution. The result is a versatile, low‑cost manufacturing cell capable of handling a wide variety of products with minimal human intervention, offering a compelling step toward truly flexible, digital‑first production systems.