Multilinear Control Systems Theory
In this paper, we provide a system theoretic treatment of a new class of multilinear time-invariant (MLTI) systems in which the states, inputs and outputs are tensors, and the system evolution is governed by multilinear operators. The MLTI system representation is based on the Einstein product and even-order paired tensors. There is a particular tensor unfolding which gives rise to an isomorphism from this tensor space to the general linear group, i.e. the group of invertible matrices. By leveraging this unfolding operation, one can extend classical linear time-invariant (LTI) system notions including stability, reachability and observability to MLTI systems. While the unfolding based formulation is a powerful theoretical construct, the computational advantages of MLTI systems can only be fully realized while working with the tensor form, where hidden patterns/structures can be exploited for efficient representations and computations. Along these lines, we establish new results which enable one to express tensor unfolding based stability, reachability and observability criteria in terms of more standard notions of tensor ranks/decompositions. In addition, we develop a generalized CANDECOMP/PARAFAC decomposition and tensor train decomposition based model reduction framework, which can significantly reduce the number of MLTI system parameters. We demonstrate our framework with numerical examples.
💡 Research Summary
The paper introduces a comprehensive theory for Multilinear Time‑Invariant (MLTI) systems, where the state, input, and output variables are tensors rather than vectors or matrices. Building on the Einstein product and even‑order paired tensors, the authors construct a special unfolding operation (denoted ϕ) that maps an even‑order tensor to a conventional matrix in the general linear group GL(ΠJ,ℝ). This isomorphism allows the direct translation of classical linear‑system concepts—stability, controllability, observability—into the tensor domain.
A major contribution is the derivation of relationships between the unfolding rank (rankU) used in earlier MLTI work and more familiar tensor rank notions such as multilinear rank, CP‑rank, and Tensor‑Train (TT) rank. By proving that a full‑rank unfolding is equivalent to certain conditions on these tensor ranks, the authors provide criteria for controllability and observability that avoid explicit matricization, thereby preserving hidden multi‑dimensional structure and reducing computational overhead.
Stability analysis is carried out by defining a tensor‑valued Lyapunov function using the notion of U‑positive definiteness. The paper shows that higher‑order singular value decomposition (HOSVD), CP decomposition (CPD), and TT decomposition can each furnish sufficient conditions for stability. In particular, the factor matrices obtained from these decompositions serve as explicit solutions to tensor Lyapunov equations, enabling efficient verification even for very high‑order systems.
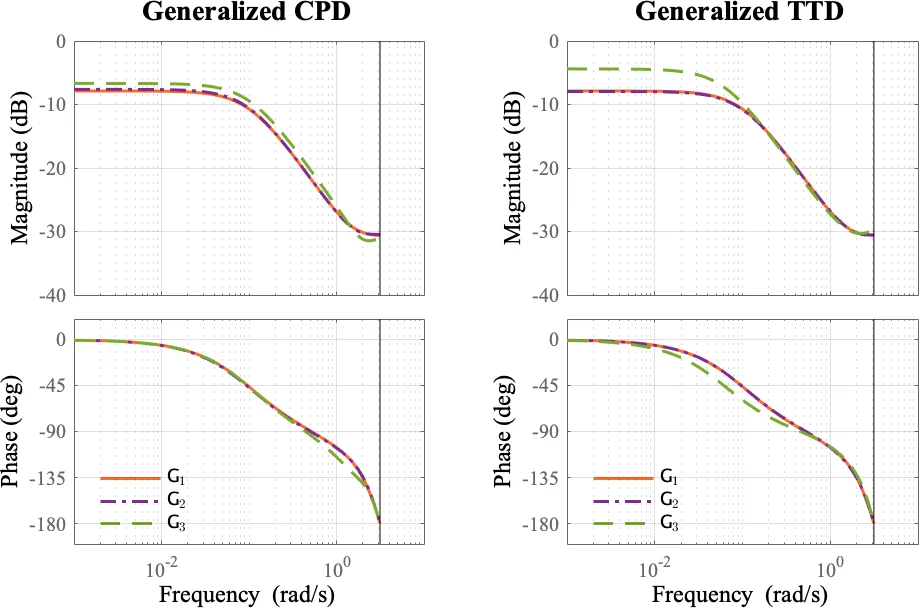
The second major pillar of the work is a model‑reduction framework based on generalized CPD and TT‑decompositions. By expressing the system tensors as low‑rank cores and factor matrices, the authors retain the Einstein‑product dynamics while dramatically shrinking the number of parameters. They prove that the reduced model inherits the stability, controllability, and observability properties of the original system, and they provide detailed computational‑complexity analyses showing that the tensor‑based approach scales far better than unfolding‑to‑matrix methods.
Four numerical experiments illustrate the practical impact. In a human‑action‑recognition task from video, the MLTI model outperforms traditional LTI approaches in classification accuracy. In a 4D Nucleome (4DN) study, the tensor formulation captures the interplay of genome structure, function, and phenotype without exploding dimensionality. A robotic manipulation example demonstrates that the reduced‑order tensor model achieves comparable control performance with substantially lower runtime. Finally, a large‑scale Markov‑process simulation shows that TT‑based approximations cut memory usage dramatically while preserving transition‑matrix fidelity.
Overall, the paper bridges tensor algebra and control theory, delivering both a rigorous theoretical foundation for MLTI systems and concrete algorithms for analysis and reduction. By leveraging the Einstein product, unfolding isomorphisms, and modern tensor decompositions, it opens a pathway to scalable, structure‑aware control of high‑dimensional dynamical systems. Future directions suggested include extensions to nonlinear multilinear dynamics, real‑time tensor computation on specialized hardware, and applications across biology, robotics, and networked systems.
Comments & Academic Discussion
Loading comments...
Leave a Comment