On Maximal Robust Positively Invariant Sets in Constrained Nonlinear Systems
In this technical communique we study the maximal robust positively invariant set for state-constrained continuous-time nonlinear systems subjected to a bounded disturbance. Extending results from the theory of barriers, we show that this set is closed and that its boundary consists of two complementary parts, one of which we name the invariance barrier, which consists of trajectories that satisfy the maximum principle.
💡 Research Summary
This paper investigates the maximal robust positively invariant (MRPI) set for continuous‑time nonlinear systems subject to state constraints and a bounded disturbance. The authors first formalize the system as (\dot x(t)=f(x(t),d(t))) with state constraints (g_i(x(t))\le0) (i=1,…,p) and a disturbance set (D) that is compact and convex. Under standard regularity assumptions (A1‑A5) guaranteeing existence, uniqueness, and smooth dependence of solutions, they define a robust positively invariant (RPI) set as a set of initial conditions whose trajectories remain inside the admissible state set for all admissible disturbances. The MRPI is then defined as the union of all RPIs contained in the constraint set, and an equivalent characterization is given: the MRPI consists of all initial states that, for every disturbance realization, generate trajectories staying forever inside the constraint set.
The paper proves that the MRPI is a closed set. This is achieved by invoking a compactness result (Proposition 3) that ensures any sequence of admissible trajectories has a uniformly convergent subsequence on any finite horizon. By continuity of the constraint functions, the limit of a convergent sequence of initial states belonging to the MRPI also belongs to the MRPI, establishing closedness (Proposition 2). This mirrors earlier results on admissible sets but with the maximization (rather than minimization) of Lie derivatives.
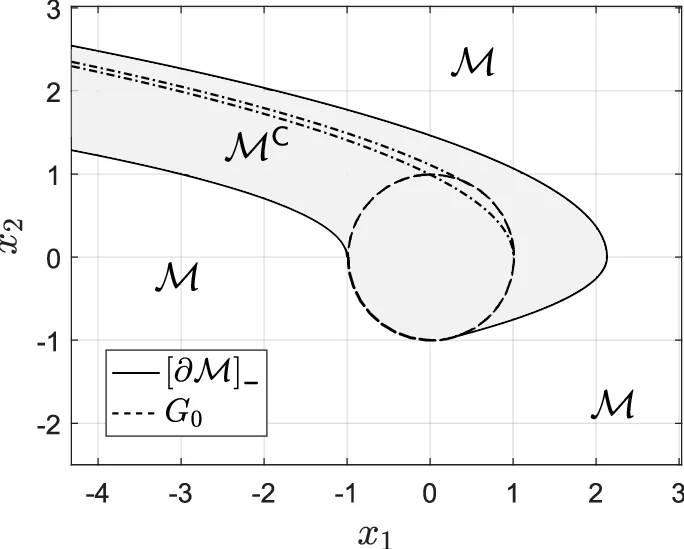
A central contribution is the detailed description of the MRPI boundary. The boundary (\partial M) is split into two complementary parts: (i) the “usable part” (
Comments & Academic Discussion
Loading comments...
Leave a Comment