Topological universality of on-demand ride-sharing efficiency
Ride-sharing may substantially contribute to future-compliant sustainable mobility, both in urban and rural areas. The service quality of ride-sharing fleets jointly depends on the topology of the underlying street networks, the spatio-temporal demand distributions, and the dispatching algorithms. Yet, efficiency of ride-sharing services is typically quantified by economic or ecological ad-hoc measures that do not transfer to new service regions with different characteristics. Here we derive a generic measure of ride-sharing efficiency based on the intrinsic ride-sharing dynamics that follows a universal scaling law across network topologies. We demonstrate that the same scaling holds across street networks of distinct topologies, including cities, islands and rural areas, and is insensitive to modifying request distributions and dispatching criteria. These results further our understanding of the collective dynamics of ride-sharing fleets and may enable quantitative evaluation of conditions towards increasing the feasibility of creating or transferring ride-sharing services to previously unserviced regions.
💡 Research Summary
The paper addresses a fundamental challenge in on‑demand ride‑sharing: predicting and optimizing service efficiency across regions with vastly different street‑network structures, demand patterns, and dispatching algorithms. Existing performance metrics—fuel consumption, monetary cost, or ad‑hoc ecological indices—are tied to specific cities or operational settings and cannot be transferred reliably to new environments. To overcome this, the authors propose a universal, dynamics‑based efficiency measure that depends only on the intrinsic collective behavior of the fleet.
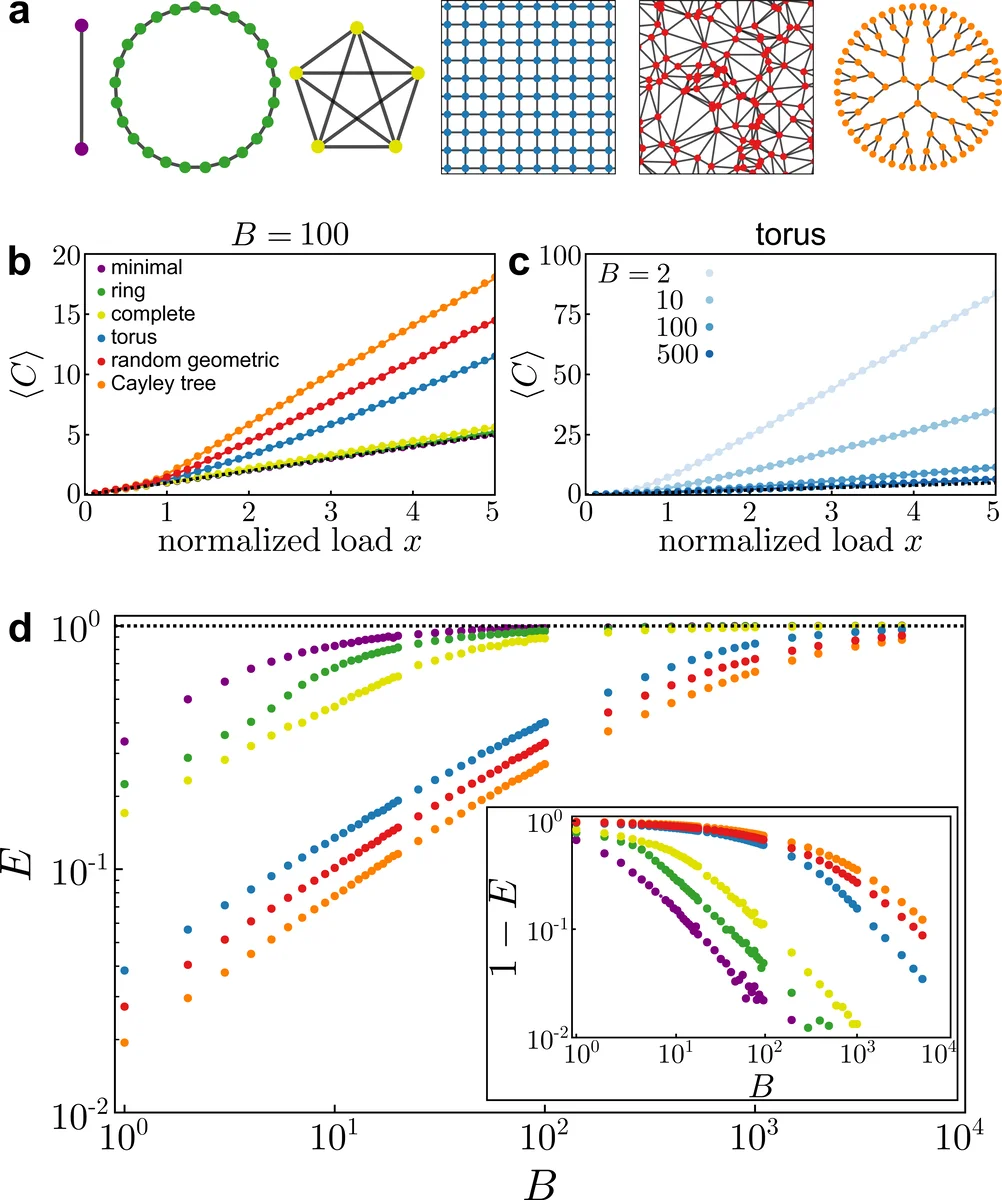
The authors model a ride‑sharing fleet as B identical “buses” that receive stochastic ride requests at rate λ. They introduce a normalized system load x = (λ · h̄_l)/(v · B), where h̄_l is the average trip length (derived from the demand distribution) and v is the characteristic vehicle speed. When x < 1, each request can be served individually (taxi‑like operation); when x > 1, sharing becomes necessary. The key observable is the average number of scheduled customers per vehicle, h_Ci, which includes passengers already on board and those scheduled for future pick‑ups. In the high‑load regime, an ideally efficient system would satisfy h_Ci = x, i.e., each vehicle carries exactly the load implied by the normalized request rate.
Efficiency E is defined as the asymptotic deviation from this ideal scaling: E = lim_{x→∞}(h_Ci/x − 1). A value of E = 0 corresponds to perfect efficiency; larger E indicates excess occupancy (inefficient sharing). The authors also define a susceptibility χ = ∂h_Ci/∂x − 1, which converges to E at high load.
Through extensive simulations on six synthetic graph topologies (complete graph, ring, torus, random geometric graph, Cayley tree, minimal two‑node graph) and on dozens of real street networks (major cities, islands, rural regions), the authors discover that all efficiency curves collapse onto a single universal function f when plotted against the scaled variable B/B₁/₂. Here B₁/₂ is a topology‑dependent scaling factor representing the number of vehicles required to achieve half of the maximal possible efficiency E_max. The universal relation is E = E_max · f(B/B₁/₂).
Analytically, the authors consider the limit of a very large fleet (B → ∞) with an efficient dispatcher that eliminates detour delays. In this limit, the average driving time per request t_d scales as a constant (independent of B), while the average waiting time t_w decays as B⁻¹ because more vehicles traverse each shortest path more frequently. Substituting these scalings into the expression for h_Ci yields h_Ci ≈ x·(1 + γ B⁻¹), where γ is the proportionality constant at which waiting time equals the intrinsic travel time τ = h̄_l/v. Identifying γ with B₁/₂ leads to the asymptotic scaling law E = E_max · f(B/γ) = E_max · f(B/B₁/₂), with f(z) ≈ 1/(1 + z⁻¹) for large z. This derivation shows that the entire efficiency curve, not just its tail, can be described by a single scaling factor despite the underlying complexity.
To link B₁/₂ to network topology, the authors introduce a measure of shortest‑path distinctness ℓ_tot/h̄, where ℓ_tot is the total length of all links and h̄ is the average shortest‑path length (averaged over the demand distribution). Small ℓ_tot/h̄ indicates that many requests share long overlapping routes (e.g., rings or minimal graphs), facilitating sharing and yielding a small B₁/₂. Large ℓ_tot/h̄ corresponds to networks where shortest paths are largely disjoint (e.g., toroidal grids), making sharing harder and increasing B₁/₂. Empirical data across all tested networks show a strong linear correlation between ℓ_tot/h̄ and B₁/₂.
Importantly, the universal scaling function f is robust to variations in request distributions (correlated vs. uncorrelated, symmetric vs. asymmetric origins‑destinations) and to different dispatching strategies (nearest‑vehicle, minimal‑detour, hybrid). Only the maximal attainable efficiency E_max depends on the algorithm; with an ideal dispatcher, E_max ≈ 1.
The paper’s contributions are threefold: (1) a novel, dynamics‑based efficiency metric that abstracts away from specific economic or environmental indicators; (2) the discovery of a universal scaling law linking efficiency to fleet size via a single topology‑dependent factor B₁/₂; (3) a clear, quantitative link between network structural properties (shortest‑path overlap) and ride‑sharing performance. These results enable planners to predict the feasibility and required fleet size for ride‑sharing services in previously unserved regions simply by measuring basic topological descriptors of the street network, without exhaustive simulation or detailed demand modeling. This universality paves the way for scalable, data‑light deployment of sustainable mobility solutions worldwide.
Comments & Academic Discussion
Loading comments...
Leave a Comment