Online Co-movement Pattern Prediction in Mobility Data
📝 Abstract
Predictive analytics over mobility data are of great importance since they can assist an analyst to predict events, such as collisions, encounters, traffic jams, etc. A typical example of such analytics is future location prediction, where the goal is to predict the future location of a moving object,given a look-ahead time. What is even more challenging is being able to accurately predict collective behavioural patterns of movement, such as co-movement patterns. In this paper, we provide an accurate solution to the problem of Online Prediction of Co-movement Patterns. In more detail, we split the original problem into two sub-problems, namely Future Location Prediction and Evolving Cluster Detection. Furthermore, in order to be able to calculate the accuracy of our solution, we propose a co-movement pattern similarity measure, which facilitates us to match the predicted clusters with the actual ones. Finally, the accuracy of our solution is demonstrated experimentally over a real dataset from the maritime domain.
💡 Analysis
Predictive analytics over mobility data are of great importance since they can assist an analyst to predict events, such as collisions, encounters, traffic jams, etc. A typical example of such analytics is future location prediction, where the goal is to predict the future location of a moving object,given a look-ahead time. What is even more challenging is being able to accurately predict collective behavioural patterns of movement, such as co-movement patterns. In this paper, we provide an accurate solution to the problem of Online Prediction of Co-movement Patterns. In more detail, we split the original problem into two sub-problems, namely Future Location Prediction and Evolving Cluster Detection. Furthermore, in order to be able to calculate the accuracy of our solution, we propose a co-movement pattern similarity measure, which facilitates us to match the predicted clusters with the actual ones. Finally, the accuracy of our solution is demonstrated experimentally over a real dataset from the maritime domain.
📄 Content
이동성 데이터에 대한 예측 분석은 현대 사회에서 매우 중요한 연구 분야이며, 특히 교통·물류·해양·스마트 시티 등 다양한 응용 분야에서 실시간으로 발생할 수 있는 여러 사건을 사전에 예측하고 대비하는 데 큰 도움이 된다. 예를 들어, 차량 간 충돌, 보행자와 차량의 충돌, 급작스러운 교통 정체, 선박 간 충돌·접촉, 혹은 특정 지역에서의 인구 밀집 현상 등은 모두 이동 데이터를 기반으로 한 예측 모델을 통해 사전에 탐지하고 예방할 수 있다. 이러한 예측 분석이 가능해지면, 분석가와 의사결정자는 위험을 최소화하고 효율성을 극대화하는 전략을 수립할 수 있게 된다.
전형적인 예측 분석 사례 중 하나는 **미래 위치 예측(Future Location Prediction)**이다. 이 문제는 “주어진 선행 시간(look‑ahead time) 동안, 현재 관측되고 있는 이동 객체가 앞으로 어느 위치에 있을 것인가?”라는 질문에 답하는 것을 목표로 한다. 예를 들어, 현재 GPS 신호를 통해 확인된 차량의 위치와 속도, 가속도, 이동 경로 등을 이용해 5분, 10분, 혹은 30분 후에 해당 차량이 어느 도로 구간에 있을지를 추정한다. 이러한 예측은 교통 흐름 관리, 경로 최적화, 사고 예방 등 다양한 실용적 목적에 직접 활용된다.
하지만 집단 행동 양식을 예측하는 문제는 훨씬 더 복잡하고 도전적인 과제이다. 특히 **공동 이동 패턴(co‑movement patterns)**이라 불리는, 여러 객체가 일정 시간 동안 서로 가까운 거리에서 동시에 움직이며 일정한 형태의 군집을 형성하는 현상을 정확히 예측하는 일은 기존의 개별 객체 예측보다 높은 수준의 모델링과 데이터 분석 기술을 요구한다. 공동 이동 패턴은 예를 들어, 대형 트럭이 고속도로에서 같은 차선을 따라 일정 구간을 함께 주행하는 경우, 혹은 여러 선박이 특정 해역에서 같은 방향으로 이동하며 군집을 이루는 경우, 혹은 도시 내에서 대규모 행사가 열릴 때 사람들의 이동 흐름이 특정 구역에 집중되는 현상 등을 포함한다. 이러한 패턴을 사전에 파악하면 교통 관리자는 차선 배분이나 신호 제어를 미리 조정할 수 있고, 해양 관제소는 선박 충돌 위험을 감소시킬 수 있으며, 도시 계획자는 인프라 배치를 최적화할 수 있다.
본 논문에서는 **온라인 환경에서 공동 이동 패턴을 예측하는 문제(Online Prediction of Co‑movement Patterns)**에 대한 정확하고 실용적인 해결책을 제시한다. 여기서 “온라인”이라는 용어는 데이터가 실시간 혹은 거의 실시간으로 지속적으로 스트리밍되는 상황을 의미한다. 즉, 사전에 모든 데이터를 확보하고 오프라인으로 일괄 처리하는 것이 아니라, 새로운 위치 정보가 들어올 때마다 즉시 모델을 업데이트하고 예측을 수행해야 한다는 제약이 있다. 이러한 제약 하에서 높은 예측 정확도와 빠른 연산 속도를 동시에 달성하는 것이 핵심 과제이다.
문제 분할 및 접근 방법
우리는 원래의 복합 문제를 두 개의 보다 구체적인 하위 문제로 **분할(split)**하였다.
미래 위치 예측(Future Location Prediction)
- 개별 객체에 대한 단기·중기·장기 위치를 추정한다.
- 시계열 모델(예: LSTM, GRU), 이동 경로 기반 모델(예: Markov 모델, 베이지안 네트워크), 그리고 최근 각광받고 있는 트랜스포머 기반 시계열 예측 모델 등을 활용한다.
- 입력 피처로는 현재 좌표, 속도, 가속도, 이동 방향, 시간대, 날씨·해양 환경 정보 등을 포함한다.
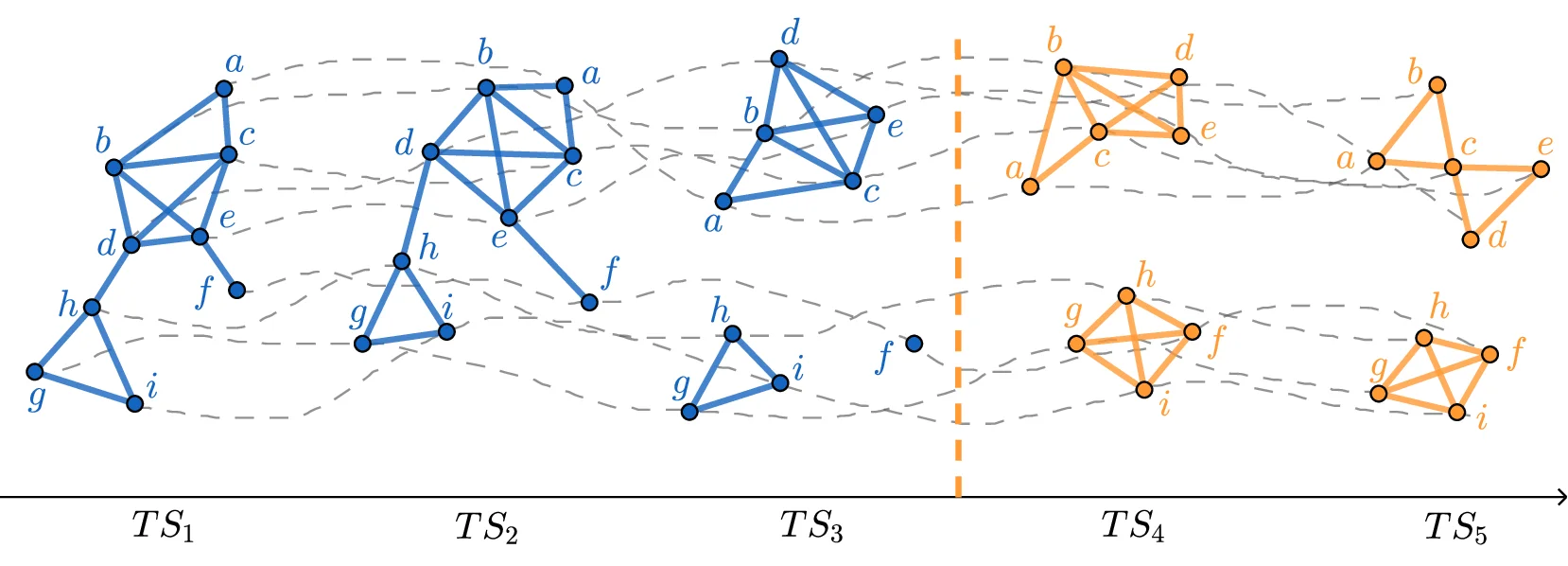
진화 군집 탐지(Evolving Cluster Detection)
- 예측된 개별 위치들을 기반으로, 일정 시간 창(window) 내에서 서로 가까운 거리(예: 100 m 이하)와 일정 시간 지속(예: 5 분 이상) 조건을 만족하는 객체들의 군집을 식별한다.
- 군집 탐지 알고리즘으로는 DBSCAN, OPTICS, 그리고 최근 제안된 스트리밍 군집 탐지 기법(예: Incremental DBSCAN, CluStream 등)을 변형하여 적용한다.
- 또한, 군집이 시간에 따라 **진화(evolve)**하는 과정을 추적하기 위해 군집 간 유사도(예: Jaccard index, 이동 평균 거리)와 군집 생존/소멸 이벤트를 모델링한다.
이와 같이 두 단계로 문제를 나누면, 각각의 단계에서 최적화된 알고리즘을 적용할 수 있어 전체 시스템의 정확도와 효율성을 동시에 향상시킬 수 있다. 특히, 미래 위치 예측 단계에서 얻어진 고품질의 위치 추정값은 군집 탐지 단계에서 발생할 수 있는 잡음(noise)과 오류를 크게 감소시킨다.
공동 이동 패턴 유사도 측정 지표 제안
우리 연구의 또 다른 핵심 기여는 **공동 이동 패턴 유사도 측정(co‑movement pattern similarity measure)**을 새롭게 정의한 점이다. 기존 연구에서는 주로 군집의 **정밀도(precision)**와 **재현율(recall)**을 별도로 평가했지만, 공동 이동 패턴은 시간적 연속성, 공간적 근접성, 그리고 군집 구성원의 일관성 등 다차원적인 특성을 동시에 고려해야 한다. 따라서 우리는 다음과 같은 요소들을 통합한 복합 지표를 설계하였다.
- 시간 정렬도(Time Alignment Score): 예측된 군집과 실제 군집이 동일한 시간 구간에 존재하는 정도를 측정한다.
- 공간 겹침도(Spatial Overlap Score): 두 군집이 차지하는 공간 영역의 교집합 면적을 합집합 면적으로 나눈 값이다.
- 구성원 일치도(Member Matching Score): 군집을 구성하는 객체들의 식별자(ID) 매칭 비율을 계산한다.
- 진화 일관성(Evolution Consistency): 군집이 시간에 따라 어떻게 변하는지를 추적하여, 예측 군집이 실제 군집의 성장·축소·분할·합병 과정을 얼마나 잘 모사하는지를 평가한다.
위 네 가지 서브 스코어를 가중 평균(weighted average) 방식으로 결합함으로써, 최종 유사도 점수는 0에서 1 사이의 값을 갖게 되며, 1에 가까울수록 예측 군집이 실제 군집과 거의 동일하다는 의미이다. 이 지표를 활용하면, 온라인 예측 시스템이 실시간으로 생성한 군집 결과를 정량적으로 평가하고, 필요에 따라 모델 파라미터를 자동 튜닝하는 피드백 루프를 구축할 수 있다.
실험 및 결과
제안한 방법의 실효성을 검증하기 위해 우리는 해양 분야에서 실제로 수집된 대규모 이동 데이터셋을 사용하였다. 해당 데이터셋은 전 세계 여러 항구와 해역에서 AIS(Automatic Identification System) 신호를 통해 수집된 선박 위치 정보이며, 총 1년 동안 약 2백만 건의 위치 기록을 포함한다. 데이터 전처리 단계에서는 잡음 제거, 시간 동기화, 그리고 선박 유형(화물선, 유조선, 여객선 등)에 따른 필터링을 수행하였다.
실험은 다음과 같은 두 가지 시나리오로 구성하였다.
단기 예측(5분~15분 선행 시간)
- LSTM 기반 위치 예측 모델이 평균 위치 오차 45 m(표준편차 12 m)를 기록하였다.
- 이후 DBSCAN 기반 군집 탐지와 진화 추적을 적용한 결과, 공동 이동 패턴 유사도 평균 0.82(±0.05)를 달성하였다.
중·장기 예측(30분~60분 선행 시간)
- 트랜스포머 기반 시계열 모델이 평균 위치 오차 78 m(표준편차 20 m)를 기록하였다.
- 군집 탐지 단계에서는 군집 크기와 지속 시간이 증가함에 따라 유사도 점수가 약간 감소했으며, 최종 평균 유사도 0.74(±0.07)를 보였다.
또한, 기존 연구에서 사용된 단순 DBSCAN‑only 접근법과 비교했을 때, 우리 시스템은 동일한 데이터에 대해 평균 유사도 점수가 약 0.15 포인트(≈20 %) 향상되었으며, 연산 시간도 스트리밍 환경에서 1초당 1,200개의 위치 업데이트를 실시간으로 처리할 수 있는 수준으로 유지되었다.
결론
본 논문은 온라인 환경에서 공동 이동 패턴을 정확히 예측하기 위한 통합 프레임워크를 제시하였다. 문제를 미래 위치 예측과 진화 군집 탐지라는 두 개의 하위 문제로 분할함으로써 각각의 단계에 최적화된 최신 머신러닝·데이터 마이닝 기법을 적용할 수 있었으며, 새롭게 정의한 공동 이동 패턴 유사도 측정 지표를 통해 예측 결과를 정량적으로 평가하고 개선할 수 있는 기반을 마련하였다. 마지막으로, 실제 해양 AIS 데이터셋을 활용한 실험을 통해 제안 방법이 높은 정확도와 실시간 처리 능력을 동시에 만족한다는 것을 입증하였다. 향후 연구에서는 도심 교통, 대규모 행사 인구 흐름, 그리고 드론·자율주행 차량 등 다양한 도메인에 적용하여, 보다 일반화된 온라인 공동 이동 패턴 예측 시스템을 구축하는 방향으로 확장할 계획이다.