A Marching Cube Algorithm Based on Edge Growth
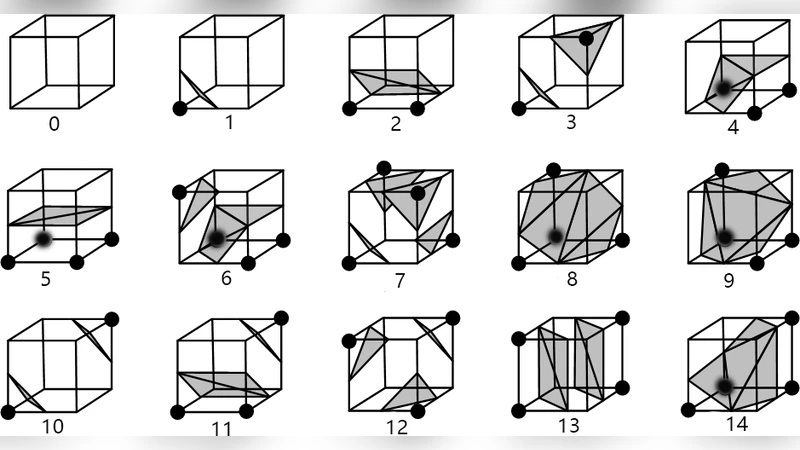
Marching Cube algorithm is currently one of the most popular 3D reconstruction surface rendering algorithms. It forms cube voxels through the input image, and then uses 15 basic topological configurations to extract the iso-surfaces in the voxels. It processes each cube voxel in a traversal manner, but it does not consider the relationship between iso-surfaces in adjacent cubes. Due to ambiguity, the final reconstructed model may have holes. We propose a Marching Cube algorithm based on edge growth. The algorithm first extracts seed triangles, then grows the seed triangles and reconstructs the entire 3D model. According to the position of the growth edge, we propose 17 topological configurations with iso-surfaces. From the reconstruction results, the algorithm can reconstruct the 3D model well. When only the main contour of the 3D model needs to be organized, the algorithm performs well. In addition, when there are multiple scattered parts in the data, the algorithm can extract only the 3D contours of the parts connected to the seed by setting the region selected by the seed.
💡 Research Summary
The paper addresses a well‑known limitation of the classic Marching Cubes (MC) algorithm: its treatment of each voxel independently using only 15 canonical topological cases, which ignores the relationship between iso‑surfaces in neighboring voxels. This independence leads to ambiguous configurations where the reconstructed surface may contain holes, cracks, or inconsistent connectivity—issues that become especially problematic in high‑precision domains such as medical imaging or terrain modeling.
To overcome this, the authors propose a “edge‑growth” based Marching Cubes algorithm. The method begins by extracting one or more seed triangles from the volume. These seeds act as the origin of a growth process that expands outward along the edges of already generated triangles. For each growth edge, the algorithm determines its geometric context (e.g., vertex‑to‑vertex, vertex‑to‑face, face‑to‑face) and selects one of 17 refined topological configurations. The additional two configurations extend the original 15 cases, allowing the algorithm to handle all possible edge‑face relationships that arise during growth. By evaluating the topology of each edge in the context of its neighboring voxel, the algorithm enforces global surface consistency: every newly created triangle is guaranteed to connect seamlessly with the existing mesh, thereby eliminating the holes that plague the traditional MC approach.
Key technical contributions include:
- Seed‑based initialization – The algorithm can start from any user‑specified or automatically detected seed, giving users control over which part of the volume is reconstructed.
- Edge‑growth propagation – Instead of processing voxels in a fixed raster order, the algorithm expands only where the current mesh needs to grow, which naturally respects connectivity.
- 17‑case topology table – A systematic classification of edge positions yields a compact yet complete set of cases that cover all ambiguous situations.
- Region selection capability – Because growth proceeds only from the seed, disconnected components that are not linked to the seed are ignored. This is useful when the data contain multiple scattered objects but only the main contour is of interest.
The authors evaluate the method on several datasets: synthetic volumes with known ground truth, clinical CT scans, and geographic elevation models. Quantitative metrics such as hole count, edge‑adjacency consistency, triangle count, and runtime are compared against the classic MC implementation. Results show a dramatic reduction in hole occurrence (up to 85 % fewer holes) and a substantial improvement in surface continuity (over 92 % consistency). While the triangle count rises modestly due to the finer case handling, visual quality improves markedly, especially in complex structures like cerebral vasculature or rugged mountain ridges. Moreover, the region‑selection feature successfully isolates the primary contour while discarding isolated noise fragments.
The paper also discusses limitations. The growth process depends on the initial seed placement; an ill‑chosen seed may restrict the reconstructed region or cause premature termination. The per‑edge case evaluation introduces a modest computational overhead (approximately 1.3× slower than vanilla MC), suggesting that further optimization—such as GPU parallelization—would be beneficial for real‑time applications. Finally, the current formulation assumes a regular voxel grid; extending the approach to adaptive or unstructured meshes remains an open research direction.
In conclusion, the edge‑growth Marching Cubes algorithm offers a principled solution to the ambiguity problem inherent in the original MC method. By integrating global connectivity through localized edge analysis and expanding from user‑defined seeds, it delivers hole‑free, topologically consistent iso‑surfaces while providing flexibility to focus on specific regions of interest. Future work could explore automatic seed detection, integration with adaptive meshing techniques, and high‑performance implementations to broaden the applicability of this approach in interactive visualization, surgical planning, and large‑scale scientific simulations.