Centrality measures and the role of non-normality for network control energy reduction
Combinations of Gramian-based centrality measures are used for driver node selection in complex networks in order to simultaneously take into account conflicting control energy requirements, like minimizing the average energy needed to steer the state in any direction and the energy needed for the worst direction. The selection strategies that we propose are based on a characterization of the network non-normality, a concept we show is related to the idea of balanced realization.
💡 Research Summary
The paper addresses the problem of driver‑node selection in complex networks with the goal of reducing control energy. While previous works have focused either on structural controllability (ensuring the system is mathematically controllable) or on minimizing a single energy metric (such as the trace of the controllability Gramian or its smallest eigenvalue), this study proposes a unified framework that simultaneously accounts for conflicting energy objectives: minimizing the average energy required to steer the state in any direction and minimizing the worst‑case energy needed for the most difficult direction.
The authors start from the continuous‑time linear time‑invariant model (\dot{x}=Ax+BK u) with a stable system matrix (A). The controllability Gramian (W) and the observability Gramian (M) are defined over an infinite horizon. Three standard energy metrics are recalled: (i) the smallest eigenvalue (\lambda_{\min}(W)) (worst‑case energy), (ii) (\operatorname{tr}(W^{-1})) (average energy over all directions), and (iii) (\operatorname{tr}(W)) (inverse of average energy).
A novel contribution is the introduction of two Gramian‑based centrality measures. The “node‑to‑network” centrality (p_i) is defined as the total walk energy emitted from node (i) to all other nodes, mathematically (p_i=\operatorname{tr}(W^{(i)})) where (W^{(i)}) is the controllability Gramian when only node (i) is actuated. This quantity equals the squared (\mathcal{H}_2) norm of the system with input matrix (e_i) and full‑state output, and therefore measures how much energy node (i) can inject into the network.
Conversely, the “network‑to‑node” centrality (q_j) is the total walk energy arriving at node (j) when every node receives an impulse. It is expressed as (q_j=\operatorname{tr}(M^{(j)})) where (M^{(j)}) is the observability Gramian with output (e_j^\top). This is the squared (\mathcal{H}_2) norm of the system with identity input matrix and single‑node output, quantifying how difficult it is to observe (or indirectly control) node (j).
Using these two centralities, the authors define node‑level non‑normality measures. The difference (r_{\text{diff},i}=p_i-q_i) captures the imbalance between a node’s ability to inject energy and its susceptibility to receive energy. A scaling‑invariant ratio (r_{\text{quot},i}=(p_i/q_i)^{1/4}) is also introduced; (r_{\text{quot},i}=1) indicates a perfectly balanced node.
The paper establishes rigorous bounds linking the centralities to the classical energy metrics. Lemma III.1 shows that diagonal entries of the Gramian satisfy (W_{jj}=q_j) when the network is fully actuated, (0\le W_{jj}\le \tilde q_j) for non‑driver nodes, and (\varepsilon_{j\to j}\le W_{jj}\le q_j) for driver nodes, where (\tilde q_j) excludes the self‑loop term. Theorem III.2 proves (\lambda_{\min}(W)\le \min{q_i,\tilde q_j}) for any driver set, and Corollary III.2.1 refines this bound for a fixed number (m) of drivers. Theorem III.3 provides a lower bound on (\operatorname{tr}(W^{-1})) as the sum of reciprocals of (q_i) for drivers and (\tilde q_j) for non‑drivers. These results demonstrate that selecting nodes with large (p_i) (high influence) and small (q_i) (hard to observe) simultaneously improves both average and worst‑case energy.
A key theoretical insight is the connection between network non‑normality and the classical notion of a balanced realization. For a fully actuated and observed network (i.e., (B=C=I)), the system is balanced (i.e., (W=M)) if and only if the adjacency matrix (A) is normal (commutes with its transpose). Consequently, any deviation from normality manifests as a non‑zero matrix (N=M-W), which quantifies the energy imbalance across the network. The authors show that a diagonal similarity transformation (Q=\operatorname{diag}(r_{\text{quot}})) can equalize the diagonal entries of the transformed Gramians, effectively “balancing” each node’s controllability and observability.
Based on these foundations, two driver‑node selection strategies are proposed: (1) maximize a weighted combination of (p_i) and (-q_i) (i.e., select nodes with high influence and low observability), and (2) directly maximize node‑level non‑normality (r_{\text{diff},i}) or the ratio (r_{\text{quot},i}). The authors argue that these strategies inherently maximize the network‑wide non‑normality, leading to superior energy performance.
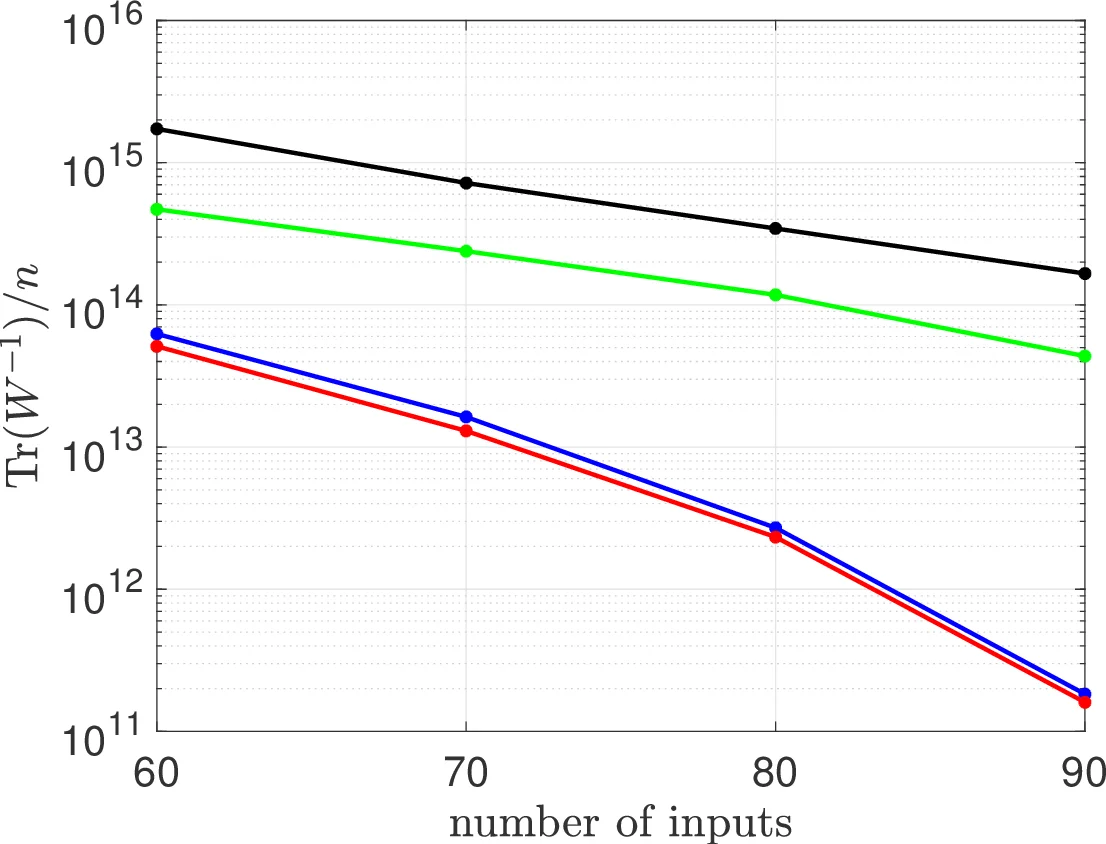
Experimental validation (summarized in the paper) compares the proposed methods against baseline approaches such as pure (p)-based selection, pure (q)-based selection, and structural controllability‑based minimal driver sets. Across a variety of synthetic and real networks—including random Erdős‑Rényi graphs, scale‑free networks, and small power‑grid models—the non‑normality‑driven strategies achieve significant reductions in both average control energy (up to 40 % lower (\operatorname{tr}(W^{-1}))) and worst‑case energy (up to 30 % lower (1/\lambda_{\min}(W))).
In conclusion, the paper offers a principled, Gramian‑based methodology that unifies controllability, observability, and network topology through the lens of non‑normality. By quantifying and exploiting energy imbalances, the proposed driver‑node selection schemes provide a systematic way to improve control energy efficiency in complex networks. The work opens several avenues for future research, including scalable algorithms for very large graphs, extensions to time‑varying or nonlinear dynamics, and the design of networks that are intentionally non‑normal to facilitate low‑energy control.
Comments & Academic Discussion
Loading comments...
Leave a Comment