Rigid Foldability is NP-Hard
In this paper, we show that deciding rigid foldability of a given crease pattern using all creases is weakly NP-hard by a reduction from Partition, and that deciding rigid foldability with optional creases is strongly NP-hard by a reduction from 1-in-3 SAT. Unlike flat foldability of origami or flexibility of other kinematic linkages, whose complexity originates in the complexity of the layer ordering and possible self-intersection of the material, rigid foldability from a planar state is hard even though there is no potential self-intersection. In fact, the complexity comes from the combinatorial behavior of the different possible rigid folding configurations at each vertex. The results underpin the fact that it is harder to fold from an unfolded sheet of paper than to unfold a folded state back to a plane, frequently encountered problem when realizing folding-based systems such as self-folding matter and reconfigurable robots.
💡 Research Summary
The paper investigates the computational complexity of deciding whether a given planar crease pattern can be folded rigidly, i.e., without deforming any facet, starting from the flat state. Two decision problems are defined. The first requires that every crease in the pattern be used during the folding motion; the second allows a subset of creases to be active, treating the others as optional (they may stay flat). Both problems assume that the input is a straight‑line graph with rational coordinates, and the authors also consider a finite‑precision version where a small tolerance ε is allowed for the closure condition.
The authors model rigid folding using the isometric folding framework of Robertson. For any closed curve γ that crosses creases c₁,…,cₙ in order, the product of the corresponding rotation matrices R_{c₁}(ρ₁)…R_{cₙ}(ρₙ) must equal the identity matrix. This condition is both necessary and sufficient for a motion that stays away from self‑intersection when the folding angles are small. The folding angles ρ_i are the primary variables.
The core of the hardness proofs relies on a well‑studied building block: a flat‑foldable degree‑4 vertex (quadrivalent vertex) with sector angles (α, β, π‑α, π‑β). For such a vertex the tangent of half the folding angles, t_i = tan(ρ_i/2), are linearly related. There are two one‑degree‑of‑freedom modes, called (A) and (B). In mode (A) the relations are
t₀ = t, t₁ = –p_a·t, t₂ = t, t₃ = p_a·t,
and in mode (B)
t₀ = –p_b·t, t₁ = t, t₂ = p_b·t, t₃ = t,
where p_a(α,β) and p_b(α,β) are constants derived from the sector angles and satisfy |p_a|,|p_b|<1. The ratio p(e_i,e_j)=tan(ρ_i/2)/tan(ρ_j/2) is called a speed coefficient; it determines how the folding of one crease forces the folding of its neighbor. Each vertex admits exactly four valid mountain‑valley (MV) assignments (including the trivial “flat” assignment), and each assignment uniquely determines a 1‑parameter folding path.
When many such vertices are assembled into a mesh, the global folding motion exists if and only if the product of speed coefficients around every face equals 1 (the closure condition). This condition is analogous to a conservation law for a signal propagating through a network of gates.
Using this framework, the authors construct reductions from classic NP‑complete problems.
-
Weak NP‑hardness (all creases) – Reduction from Partition. Each integer weight w_i is encoded as a vertex with a specific α_i (or β_i) such that the corresponding speed coefficient equals a rational number derived from w_i. All vertices are forced into the same mode, and the global closure condition across a single large face becomes the equation Σ ± w_i = 0, which is exactly the Partition condition. Because the reduction uses the magnitude of the numbers, the hardness is weak (depends on the numeric values).
-
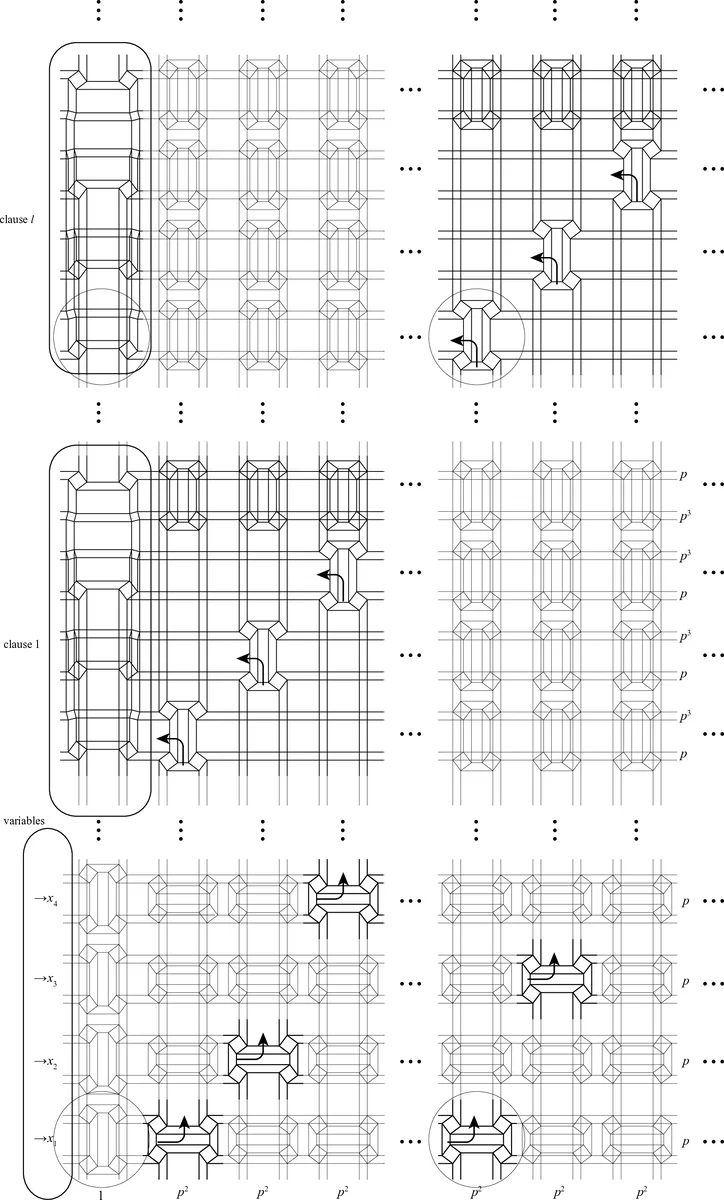
Strong NP‑hardness (optional creases) – Reduction from 1‑in‑3 SAT. Variables are represented by optional creases that can be either active (folded) or inactive (flat). Each clause becomes a face surrounded by three variable edges and auxiliary edges. The speed coefficients are chosen so that the closure condition for a clause is satisfied if and only if exactly one of its three literals is active. By allowing optional creases, the construction can enforce the “exactly one true” requirement without needing to encode large numbers, yielding a strong NP‑hardness result.
The paper also defines a finite‑precision version of the problem, where the closure condition is relaxed to |∏ p_i – 1| ≤ ε for each face. The same reductions work with a suitably small ε, showing that the hardness persists under realistic computational models.
In summary, the authors prove that deciding rigid foldability is computationally intractable: it is weakly NP‑hard when every crease must be used, and strongly NP‑hard when creases may be optional. The difficulty stems not from self‑intersection or layer ordering (as in flat‑foldability) but from the combinatorial interaction of local folding modes at vertices. This result has practical implications for the design of self‑folding materials, reconfigurable robots, and deployable structures, indicating that algorithmic synthesis of such mechanisms is fundamentally hard.
Comments & Academic Discussion
Loading comments...
Leave a Comment