Motion-Encoded Particle Swarm Optimization for Moving Target Search Using UAVs
💡 Research Summary
This paper presents a novel algorithm named Motion-Encoded Particle Swarm Optimization (MPSO) for the critical task of searching for a moving target using Unmanned Aerial Vehicles (UAVs). The core challenge is to plan an optimal UAV flight path that maximizes the probability of detecting the target within a limited operational timeframe, often referred to as the “golden time.”
The authors begin by framing the search problem within a Bayesian probabilistic framework. The target’s location is modeled using a belief map, initialized based on prior information (e.g., last known position). The target is assumed to follow a conditionally deterministic Markov motion model. The UAV’s sensor is modeled as binary, providing only “detection” or “no detection” observations with a known likelihood. The belief map is recursively updated through a predict-update cycle: the prediction phase propagates the target’s probability distribution using its motion model, and the update phase refines it using the latest sensor observation. From this framework, the objective function is derived as the cumulative probability of detecting the target for the first time within a finite number of search steps. The goal is to find the UAV path that maximizes this cumulative detection probability.
The primary contribution is the development of the MPSO algorithm. Traditional PSO applications for path planning often encode a solution (particle position) as a sequence of grid coordinates representing the path nodes. This approach can generate invalid paths and disrupt the swarm’s coherence. MPSO introduces a fundamental shift by encoding a UAV’s search path not as a list of points, but as a sequence of motion vectors. Each path segment is represented by a motion vector defined by a magnitude (ρ) and a direction (α). Thus, each particle’s position in the swarm is a string of these motion vectors. The PSO algorithm then operates in this continuous motion-vector space, updating velocities and positions according to adapted formulas that consider the particle’s personal best and the swarm’s global best.
For fitness evaluation, the continuous motion vector sequence is mapped back to a feasible discrete path on the grid-based search map. This mapping involves normalizing the step size and quantizing the direction to one of eight possible neighbors of the UAV’s current cell, ensuring physically realizable movements. The resulting discrete path is then evaluated using the Bayesian-derived objective function to compute the cumulative detection probability. This value guides the update of the personal and global best positions.
The proposed MPSO offers key advantages. The motion encoding preserves the natural momentum and coherence of the particle swarm, helping to avoid premature convergence to local optima. It effectively separates the continuous optimization process from the discrete execution constraints, leading to more efficient and effective exploration of the solution space.
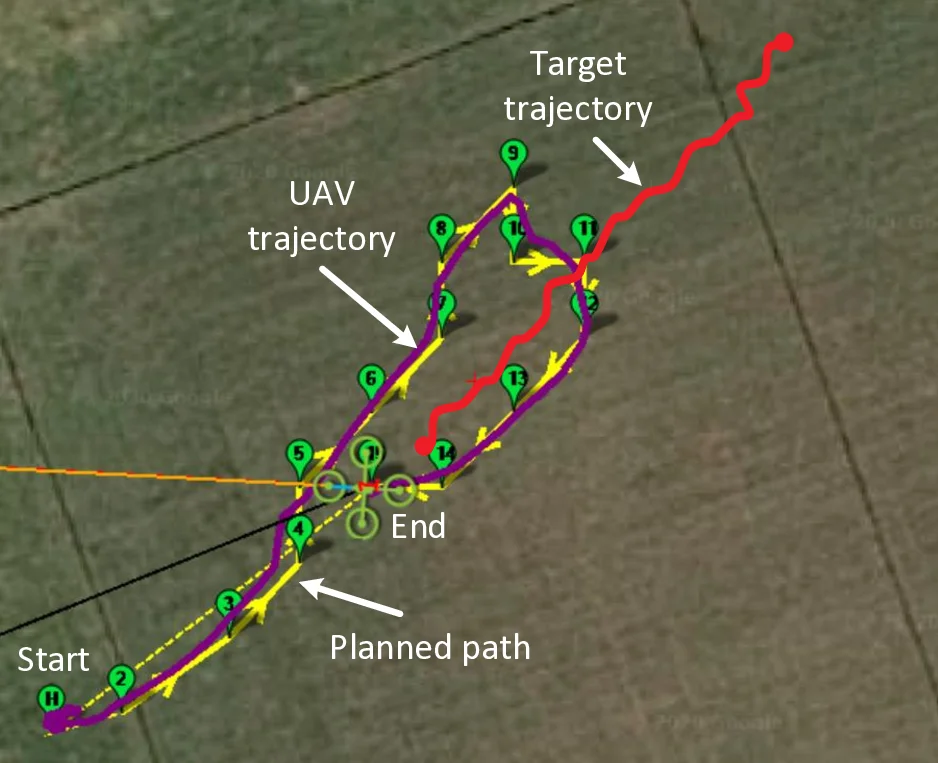
The algorithm’s performance is rigorously validated through extensive simulations and real-world experiments. Simulation results demonstrate that MPSO significantly outperforms the original PSO algorithm, improving the target detection probability by 24% and reducing the computation time by a factor of 4.71. Furthermore, MPSO shows superior performance compared to other state-of-the-art metaheuristic algorithms, including Artificial Bee Colony (ABC), Ant Colony Optimization (ACO), Genetic Algorithm (GA), Differential Evolution (DE), and Tree-Seed Algorithm (TSA), across most tested search scenarios involving different target speeds and motion patterns. Practical field experiments with real UAVs searching for a dynamic target further confirm the robustness and applicability of MPSO in real-world conditions.
In conclusion, this paper successfully develops and demonstrates MPSO, an innovative PSO variant that reformulates the path planning problem through motion encoding. By aligning the algorithm’s search space with the physical motion of the UAV, MPSO achieves a remarkable balance between high detection performance, computational efficiency, and practical implementability, offering a powerful solution for dynamic target search with UAVs.
Comments & Academic Discussion
Loading comments...
Leave a Comment