Bearing-Only Consensus and Formation Control under Directed Topologies
We address the problems of bearing-only consensus and formation control, where each agent can only measure the relative bearings of its neighbors and relative distances are not available. We provide stability results for the Filippov solutions of two…
Authors: Arman Karimian, Roberto Tron
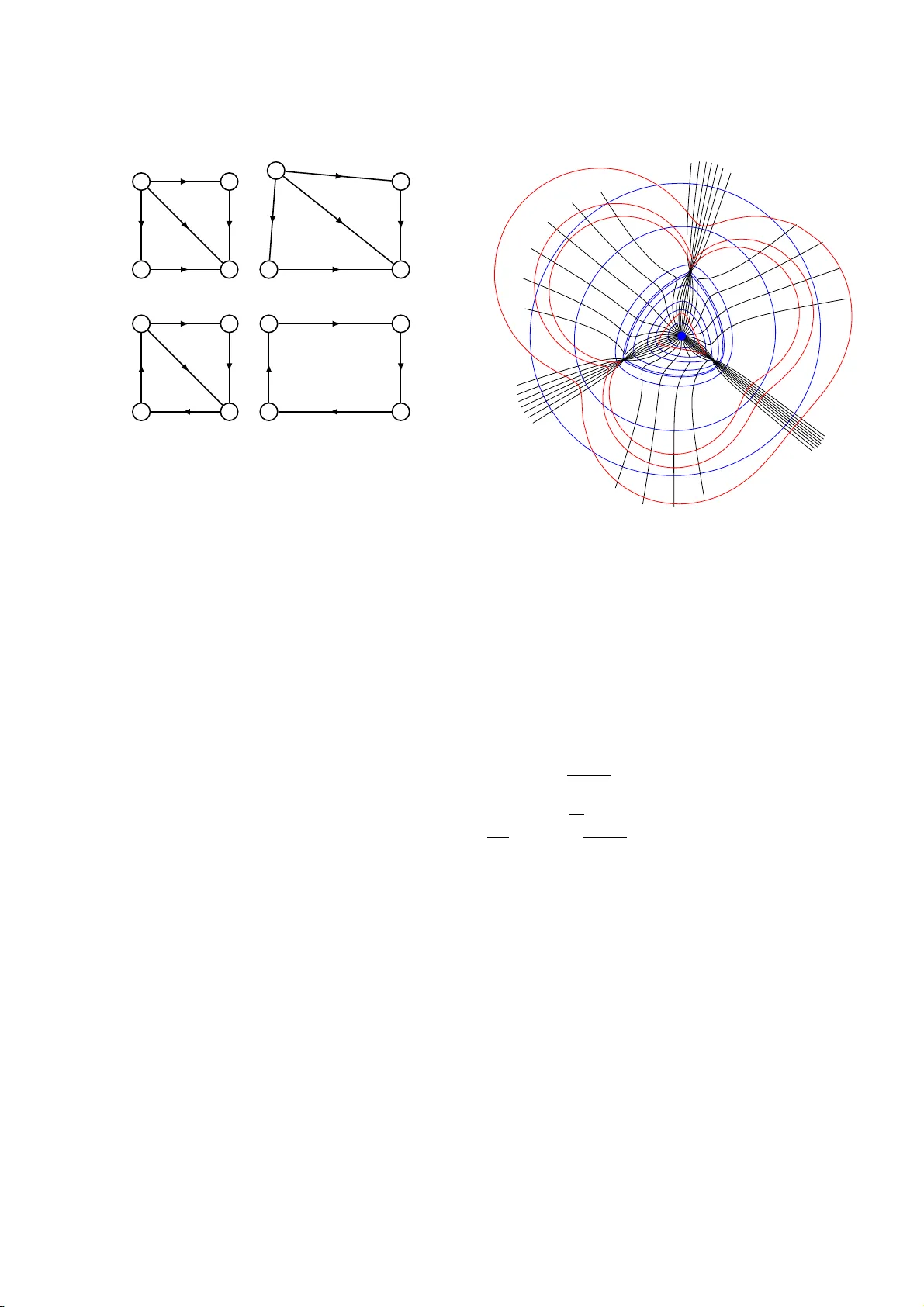
Bearing-Only Consensus and F ormation Contr ol under Di rected T opologies Arman Karimian and Rob e rto T ron Abstract — W e address the pro b lems of bearing-only con- sensus and f ormation control, where each agent can only measure the relativ e bearings of its neighbors and relative distances ar e not a vailable. W e pro vide stabili t y r esults for the Filippov solutions of two gradient-descent laws from non- smooth L yapunov functions in the context of differential in- clusion. For the consensus and formation control problems with undirected sensin g topologies, we prov e finite-time and asymptotic conv ergence of the p roposed non-smooth gradient flows. For the directed consensus pr oblem, we prov e asymptotic con vergence using a d ifferent non-smooth L yapunov function giv en that the sensing graph h as a glo bally reachable node. Finally , For the d i rected fo rmation control problem we prov e asymptotic con vergence f or directed cycles an d directed acyclic graphs and also introduce a n ew notion of bearing persistence which guarantees conv ergence to th e desired bearings. I . I N T RO D U C T I O N Distributed and co operative control of multi-agen t systems using relativ e bear in g measureme n ts has gaine d a growing interest in recen t year s [ 3], [12], [13 ] , [ 1 7]. Using bearing measuremen ts, which are r elati ve directions between agents, as opposed to relative position s is m otiv ated by the u se of vision-based sen so rs. Such sen sors pr ovide p recise m e asure- ments of direction between ag e nts while the correspo nding distances are gener ally not known exactly . The first p roblem addressed in this paper is the m u lti-robot rendezvous pr oblem, wh ich is the task of steering robots such that they eventually con verge to the same loc ation. For robo ts with single integrator dyn a mics, this p roblem is essentially the sam e as the co nsensus problem and has been extensi vely studied in the literature wh e n dif f erence b etween the states are a vailable to agents thr ough communicatio n [11]. Howe ver, this task is n o t fu lly explored for th e bearin gs-only case [20]. The bearing -only formation control prob lem, whose goal is to steer a group of ag ents to a set o f desired r e lati ve positions, is the second pr oblem we ad dress. I n th e literature, two g eneral solutions fo r this task has b een presented in [19] and [14] for single in tegrator dyn amics. T he contro ller giv en in [19] uses an ad ho c p rotocol based on pro je c tor matrices while [14] is ba sed o n minimizing a positive defin ite function th rough g radient descent. Both of these approac h es, howe ver, are limited to undirected graphs, i.e. agents should sense their relative b earings in a bidirectional manner . In [18], a co ntroller is presen ted for dire c ted graphs, but relies on relative positions and the stability of the co ntroller is not The authors are with the Department of Mechan ical Engineeri ng of Boston Uni versity , Boston, MA. E-mail: { armandok,tron } @bu. edu . proved. In [13 ], the co ntroller in [19] was extended to th e Leader-First Follower structures. The n otion of bearing persistence, as was intr oduced in [18], ensures that the desired for mation is achievable in directed inter a ction topolo g ies. In addition , the notio n of infinitesimal bearing rig idity (or simply rigidity) [ 19] is key in gua ranteeing that fo r a given set of b e a ring measurem ents between a gro up of ag ents, a uniqu e class of solutions exist which o nly differ by a glob a l tran slation, ro tation and scalin g of the agents’ p ositions. While th e second n o tion has bee n a subject of in terest in the p ast years [1 ], [8 ] , b e aring persistence is fairly n ew and need s mor e attention. The inh erent discontinuo u s natu re of bearing measure- ments yields d ifferential equa tio ns with discontinuou s right- hand side and th eir p roof of stability usually re q uires non- smooth L yapun ov fu n ctions. W e pr esent stability r esults in th e m o re gen eral context of differential in clusion fo r consensus and form ation contr o l problem using bearin g measuremen ts only . P ap er motiva tion . F or the consensus problem, in [20] a proof of stability was presented fo r undir ected grap hs, how- ev er, pr oof of finite-time co n vergence was lacking. In [4], a controller with bearings were pr oposed with finite-tim e conv ergen ce, howev er, it was limited to o n e dimen sional space. For the f ormation co ntrol prob lem, the existing results for d irected graph s are very limited and also the d e finition of bear ing per sistence given in [18 ] is based on a co ntroller that requ ires relative p ositions an d is no t compatible with a bearing- only controller . P ap er co ntrib utions . In this pap er , we fo cus on agen ts with single integrato r dynamics and assume that the agents have agreed on a common refe r ence frame. Fu rthermor e, we presu m e that there are no constra in ts on the field of view of ag ents an d their sensors are omni- directional. Under these assumptions, for th e co n sensus p roblem we extend the controller in [4] to h ig her dimensio n s and to direc ted graphs. For un directed g raphs, we prove that conver gence happen s in finite time. F o r the directed graphs, we only establish asymptotic stability and lea ve finite time co n vergence as a con jecture. For the f o rmation control prob lem, we prove that the con troller in [14] stabilizes dir ected acyclic graphs and also directed cycle grap hs. W e pr esent a n ew definition for bearing persistence and also p rovide a coun ter example for the conjecture made in in [18] on stability of the given controller . I I . N O T A T I O N A N D P R E L I M I N A R I E S A. General notatio n W e denote the dimension of workspace by d . Th e cardin a l- ity of a set S is given by |S | an d its conve x h ull an d con vex closure is giv e n by co( S ) and co( S ) . The euclidean norm is denoted by k . k and the Kr onecker pr oduct is d enoted b y ⊗ . The d − d imensional open and clo se ball cen tered at c with radius r a re denoted a s B d ( c , r ) and ¯ B d ( c , r ) respe c ti vely . W e denote the id entity matr ix b y I d ∈ R d × d and 1 d ∈ R d denotes the column vector of all ones. The stack( . ) and diag( . ) oper ators are used to stack column vecto rs vertically into a bigger co lumn vector and squ are matrices d ia g onally into a bigge r square matrix. A pr ojection ma trix P ( v ) for a vector v ∈ R d is defined by: P ( v ) , I d − vv T k v k 2 , (1) and is symmetric and po siti ve semidefinite with a single zero eigenv alue that correspon d s to the eig en vector v . B. Graph Theory and F ormations A (dir ected ) graph G = ( V , E ) is g iven by a set of vertices V = { 1 , . . . , n } conn e c ted by direction al edg es given by the set E ⊆ V × V . An un dir ected g raph is a grap h where fo r ev er y ed g e ( i, j ) ∈ E the oppo site edge ( j, i ) is also in E . The compleme n t of E is given by ¯ E , { ( j, i ) : ( i, j ) ∈ E } . Th e set of neighbo rs of a vertex v is given by N + v and N − v , where the former contains the vertices to which an ou tgoing edg e from v exists and th e later co ntains the vertices with ingoin g edges to v . For an undirected graph , the se two sets are eq ual and denoted as N v . A weighted graph G = ( V , E , A ) is a graph with positiv e weig h ts a ij ∈ R a ssociated to every edge ( i, j ) in E such that a ij = a j i if ( j, i ) is also in E , an d th e adjacen c y m a trix A = [ a ij ] ∈ R n × n holds all the weights such that weig h t of edg e s not in E is zero. The d e gree matrix ∆ = diag( a i ) ∈ R n × n is a diag onal matrix with entries equal to the sum of the rows of A , i.e., a i = P j ∈V a ij . An orien tation of a grap h G = ( V , E ) is given b y G σ = ( V , E σ ) with |E σ | = m such th at every edge e ∈ E only appears in one directio n in E σ = { e k } m k =1 in som e arbitrar y orderin g. The Oriented In cidence ma trix H = [ h ve ] ∈ {± 1 , 0 } n × m is such that fo r every e k = ( i, j ) ∈ E σ we h av e h ik = 1 and h j k = − 1 and zero other wise. The Directed Oriented Incidence matrix is given b y H + = [ g ve ] ∈ {± 1 , 0 } n × m where g ik = 1 e k = ( i, j ) ∈ E and e k ∈ E σ − 1 ( i, j ) ∈ E and e k = ( j, i ) ∈ E σ 0 otherwise . (2) If the gra ph is undire c te d we have H + = H . The Lapla cian matrix is g iv en by L , ∆ − A = H + diag( w 1 , . . . , w m ) H where w k = max( a ij , a j i ) for e k = ( i, j ) ∈ E σ . In this paper, we make the standing assumption that graph s are free of self-loops (i.e. ( i, i ) / ∈ E , ∀ i ∈ V ) , an d we ig hts are nonnegative. A fo r mation F = ( G , x ) is a pairin g o f the vertices o f G with the vector x = stac k( x 1 , . . . , x n ) ∈ R nd where verte x v is assigned to x v ∈ R d for all v ∈ V . For an edge ( i, j ) ∈ E σ , the correspond in g bea rin g measurement u ij ∈ R d is defined by: u ij , x j − x i d ij d ij 6 = 0 0 d ij = 0 (3) with d ij , k x j − x i k b eing the Euclidean distance b etween vertices i a n d j . C. F ormation E quivalence and Bearing Rigidity T wo formation s F = ( G , x ) and ˜ F = ( G , ˜ x ) are: • Identical if x = ˜ x . • Congruent if x = ˜ x + 1 n ⊗ t f o r som e t ∈ R d . • Similar if x = s ˜ x + 1 n ⊗ t for som e s > 0 and t ∈ R d . • Equivalent if u ij = ˜ u ij for every ( i, j ) ∈ E . A framework F is said to be (infin itesimally bearing) rigid if every framework ˜ F that is e quiv alent to F is also similar to F . Intuitively , a ny two rig id frameworks with the same underly ing graphs G an d equal bearing measurements must have a similar shape up to a tra nslation and a scaling factor . I I I . B E A R I N G - O N LY C O N S E N S U S Linear consensus problem s in networks with fixed un d i- rected topologies reach con sensus o n a co m mon state by minimizing the L aplacian poten tial which is the sum of squared differences between the states of neighbo ring ag ents [11]. In formatio n co nsensus application, for a formatio n F with a conn e c ted and und irected gr aph G = ( V , E ) , th e Laplacian potential is defined as: φ ( x ) = 1 2 X { ( i,j ) , ( j,i ) }⊆E k x j − x i k 2 = 1 2 x T Lx (4) with L = L ⊗ I d being the infl ated Lap lacian matrix with constant u nit weig h ts for edges in E . T he poten tial function (4) is ob tained by summing the smo oth edge potentials φ { i,j } ( x i , x j ) = 1 2 d 2 ij over all edges. By setting the velocity of each ag ent to negative of the der i vative of φ with respect to its position, we get: ˙ x i = − ∂ φ ∂ x i = X j ∈N i x j − x i (5) or eq u i valently ˙ x = − Lx . Since L is a constant and positive semi-definite m atrix, the agents converge exponen tially to their centroid and the rate of co n vergence is lower -b ounded by the algebraic co nnectivity of G . Moreover , the cen troid does not chan ge at all times and agents converge to the centroid of their initial formatio n. However , this contro ller requires every ag ent to know its relative position with respect to all its neigh b ors, i.e. ˙ x i = P j ∈N i d ij u ij . In this section we will show that on ly knowing the relativ e bearing measurements u ij is enoug h for reachin g consensus in finite time. W e will prove that f or a dire cted grap h , consensus is reached by the co ntroller: ˙ x i = X i ∈N + i u ij , (6) if the graph has a globally reachable n ode. W e first begin with undirected graphs as a special case, then we will discuss the general case of dir e c ted grap hs. A. Undir ected graphs Consider th e conve x and n on-smoo th ed ge poten tial func- tion ϕ { i,j } ( x i , x j ) = d ij , summed over all edges in E : ϕ ( x ) = X { ( i,j ) , ( j,i ) }⊆E ϕ { i,j } (7) By setting the velocity of each of th e single-in tegrator agents to the opposite of th e gradien t o f (7), we obtain the f ollowing controller : ˙ x i = − ∂ ϕ ∂ x i = X j ∈N i u ij (8) Let w k = 1 d k if d k = k x j k − x i k k is no t ze ro an d w k = 0 otherwise, for every e k = ( i k , j k ) ∈ E σ . Using v ariable weights w k over edges, we define the wighted la p lacian matrix as ˘ L , H diag ( { w k } m k =1 ) H T and ˘ L , ˘ L ⊗ I d = H diag ( { w k I d } m k =1 ) H T where H , H ⊗ I d . Hence, the potential func tio n in (7) can be wr itten as: ϕ = x T ˘ Lx (9) and contro ller in (8) is given by: ˙ x = − ∂ ϕ ∂ x = − ˘ Lx , (10) or also as ˙ x = Hu . Howe ver, ϕ { i,j } is no t differentiable when x i = x j . Consequ ently , ϕ is no t differentiable when - ev er the distance between any p air o f ag ents conn ected by an edg e r eaches zero . I n such circumstanc e s, we pick th e zero vector as a sub-g radient of ϕ { i,j } (which is alw ay s non - negativ e) , as u ij was defined in (3). This sud den ch a nge in magnitu de of u ij will make the rig ht h a nd side of (10) discontinuo us. Therefo re, we resort to solutions in the Filippov sense in ter ms of differential inclusion [5] and use n on-smoo th analysis to prove stability . Co n sider the dif ferential e q uation with discontin uous right hand side: ˙ x = X ( x ) (11) W e co nsider solu tions in the f orm of differential inclusion ˙ x ∈ K [ X ]( x ) , where K : R dn → 2 R dn is a set- valued map ev aluated aroun d x excluding any set S of measure zero : K [ X ]( x ) = \ δ> 0 \ µ ( S )=0 co X B dn ( x , δ ) \ S . (12) where µ ( . ) is the Leb esgue measure. This yields X ( x ) if X is co ntinuous at x or conve xificatio n of th e limits o f X about points where X is discontin uous. Also, for a locally Lipschitz and regular functio n f : R dn → R , the Clarke generalized gradient is defined as: D f ( x ) = co lim q → + ∞ ∂ ∂ x f ( x q ) | x q → x , x q / ∈ Ω f (13) where Ω f is the set of points where f is n o t differentiable, and the set-valued Lie deriva tive of f is given by: ˜ L X f ( x ) = ℓ ∈ R | ∃ v ∈ K [ X ]( x ) s.t. ζ T v = ℓ, ∀ ζ ∈ D f ( x ) (14) which can possibly b e empty . Now , we introd uce the LaSalle Inv arian ce Principle for disco ntinuous systems: Theor em 1 ( LaSalle Invariance Princip le [2]): Let f : R d 7→ R b e a locally L ipschitz and r egular function . Let x 0 ∈ S ⊂ R d , with S compact and strongly in variant for (11). Assume that either max ˜ L X f ( x ) ≤ 0 o r ˜ L X f ( x ) = ∅ for all x ∈ S . Let Z X ,f = { x ∈ R d | 0 ∈ ˜ L X f ( x ) } . Then, any solution x : [ t 0 , + ∞ ) 7→ R d of ( 1 1) starting f r om x 0 conv erges to th e largest weakly in variant set M contain ed in Z X ,f ∩ S . Moreover , if the set M is an affine collectio n of po ints, then th e limit of all solutio ns starting at x 0 exists and equals one of them. Pr oposition 1 (F in ite-time co n vergence [6]): Unde r the same a ssum ptions of Theore m 1 , f urther assume that there exists a n eighbor hood U of Z X ,f ∩ S in S such that max ˜ L X f ≤ ǫ < 0 almost everywhere on U \ Z X ,f ∩ S . Then, any solution x : [ t 0 , + ∞ ) 7→ R d of (11) starting at x 0 ∈ S reach es Z X ,f ∩ S in fin ite time. Mor eover , if U = S , then the co n vergence time is upper b o unded by ǫ − 1 ( f ( x 0 ) − min x ∈ S f ( x )) . By setting X to be (10), we see that due to X being bound ed and upper semico ntinuous with no nempty , compact, and con vex values, Filippov solution s of (10) exists . The generalized grad ient of ϕ { i,j } with respect to stack( x i , x j ) is giv e n b y: D ϕ { i,j } = ( { stack( − u ij , − u j i ) } d ij 6 = 0 { stack( ǫ ij , − ǫ ij ) } , ǫ ij ∈ ¯ B d ( 0 , 1) d ij = 0 (15) Let N • i denote neighb o rs o f i whose distance to i is ze r o. The set-valued map fo r ˙ x = X ( x ) is th en g i ven by: K [ X ]( x ) = − D ϕ ( x ) = − ˘ Lx ⊕ I (16) where ⊕ is the Minkowski sum and I is the set g iven by: I = { stack ( ǫ 1 , . . . , ǫ n ) | ∀ i ∈ V , ǫ i ∈ ¯ B d ( 0 , |N • i | ) , ǫ i + X j ∈N • i ǫ j = 0 } (17) Let ¯ x = 1 n P i ∈V x i be the ce n troid of the form ation. W e define the d isagreement vector for each agent by δ i = x i − ¯ x . This c an b e written in th e ag gregate form by δ = Jx , where J = ( I n − 1 n 1 n 1 T n ) ⊗ I d is the matrix that removes th e compon ent of x in the linear subspac e J = s pan( 1 n ⊗ I d ) . Now , we will show tha t the controller given in (1 0) is lower - bound ed by the con stan t ν defin e d by: ν = min x k ˘ Lx k s.t. k Jx k = 1 (18) Intuitively , ν de p ends on the topology of the grap h, and similar to a lg ebraic connectivity an d is greater than zer o if the grap h is conn e cted. Lemma 1 : ν > 0 if G is co n nected. Pr oof: Notice that (18) can be rewritten as: ν = min y k ˘ Ly k s.t. k y k = 1 y ∈ J ⊥ Since y belong s to th e intersection of a sphere with a linear subspace, which is com p act, the minim um exists. Furthermo re, k ˘ Ly k is non-negative and therefore ν ≥ 0 . W e will show that ν 6 = 0 for conn ected gr a phs by c ontradiction . If ν is zero a nd d ij 6 = 0 for a ll ed ges in E , th en ˘ L is of rank n − 1 and y ∈ n ull( ˘ L ) = span( 1 n ⊗ I d ) = J . Since we assum ed y ∈ J ⊥ , th en y = 0 , wh ich violates k y k = 1 . If the re are coinc ident adjacent agen ts, g i ven the definition of a bear in g vector in (3), the correspo nding weight of edges con n ecting them is zero as if those edges were absent. Hen ce, the no n -zero edges can b e p artitioned into κ co nnected com ponents ( κ ≥ 1 ) with weighted laplacians { ˘ L k } κ k =1 such that ˘ L = dia g( ˘ L k ) after some permu tation over node s. Sinc e each compo nent is con nected, ˘ L k y k equals zero if and only if all nodes in comp o nent k are c oincident, where x k denotes the coor dinates of nodes from com ponent k . Hence, ˘ Ly is zero if an d only if all n odes of each compon ent are coincide n t. Given that the n odes conn e cted by ze ro-weight ed ges are also co in cident, and these edg es connect these co m ponents to form a con nected graph, all the nodes n eed to be co in cident, violating the k y k = 1 condition . For the n ext step, we will show finite-tim e stability o f ( 1 0). Theor em 2: max ˜ L X ϕ ( x ) = −k ˘ Lx k 2 ≤ − ν 2 Pr oof: By definition, we h a ve that D ϕ ( x ) = ˘ Lx ⊕ I and K [ X ]( x ) = − ˘ Lx ⊕ I . Based on ( 14), we will show the intersection of in ner prod ucts of member s of D ϕ ( x ) with K [ X ]( x ) is either e mpty or eq uals −k ˘ Lx k 2 . If n one of the nodes are intersecting, I is empty and we have ˜ L X ϕ ( x ) = −k ˘ Lx k 2 . If I is n ot empty , su ppose exists α ∈ I and ℓ ∈ ˜ L X ϕ ( x ) such that: \ β ∈I ( ˘ Lx + α ) T ( − ˘ Lx + β ) = ℓ Since for ev e r y β ∈ I , − β is also in I , then by picking the values − α an d α fo r β we g e t ℓ = − k ˘ Lx + α k 2 and ℓ = −k ˘ Lx k 2 + k α k 2 . By settin g th ese two te r ms equal an d simplifying them, we have k α k 2 + α T ˘ Lx = 0 . This is true on ly if α = 0 , which means ℓ = −k ˘ Lx k 2 , or if α = − ˘ Lx . T his cannot happen since α ∈ I , its non -zero entries only corresp o nd to agen ts that are intersecting and the non-ze r o entries of ˘ Lx corr e spond to ag ents th at are not intersecting. Furthermor e, since k ˘ L ( x ) x k = k ˘ L ( β x ) β x k fo r any β > 0 the m agnitude of ˘ Lx d oes no t chang e with scale and the ineq uality k ˘ L ( x ) x k ≥ ν fr om Lemm a 1 also stands for k ˘ L ( β x ) β x k . Hence , the proof is complete. As was shown in Theorem 2, the set-valued Lie-deriv ative of ϕ ( x ) is upper bou nded b y a n egati ve co nstant, which indicates tha t the co n vergence happ ens in finite- time , with t reach ≤ ϕ x ( t =0) ν 2 . Lemma 2 : The centro id o f a form ation under c o ntroller (8) is inv arian t. Pr oof: Let Ξ κ = 1 n P n i =1 x ( κ ) i be the average of coordin ates of all agents alon g dimension κ ≤ d . Since K [ X ]( x ) = − ˘ Lx ⊕ I , for any χ ∈ K [ X ]( x ) we have th at P n i =1 χ i = 0 . T h erefore, D Ξ κ = S χ ∈K [ X ]( x ) P n i =1 χ ( κ ) i = 0 for any κ ≤ d an d th e pr o of is complete. From lemma 2 we ca n see that the age nts converge to the av er age value of their initial p ositions an d this centro id is in variant alo n g time. B. Dir ected graphs In the pre v ious section , we inv e stigated consensu s fo r undi- rected g raphs. I n practice, howe ver , ag ents may not sen se the bearing vectors o f their neigh b ors in a b idirectional manner or thro ugh comm unication. As we will show in this section, having bidirectional sensing informa tion is n ot necessary . W e model these interactio ns with a d irected sensin g g raph G , where ( i, j ) ∈ E me a ns that i can measure u ij . As we showed earlier, for an u ndirected g r aph it su ffi ces fo r th e graph to be connected in orde r to reach consensus. In this section, we in vestigate the con troller g i ven in (8) but for the directed g raph G , w h ich is: ˙ x i = X j ∈N + i u ij (19) or as ˙ x = H + u . W e will show that it suffices for G to have a glob a lly reachable no d e, or equivalently , the comp lement of G to ha ve a directed span ning tree in ord er to reach consensus. Assumption 1: The d irected graph G has a glo bally reach- able node. The intuition b ehind (19) is that each agen t i has a priv ate conv ex o b jectiv e f unction ϕ i ( x ) = P j ∈N + i d ij which tries to minimize by m oving in the direction of − ∂ ϕ i ∂ x i . The m inimizer of ϕ i with respect to x i is unique if { x j } j ∈N + i are not collinear and is called the geome tr ic median or Fermat point [9]. Th e geometr ic med ian is always in side the c on vex hu ll of neighb ors of i and hen ce i reaches co nsensus with its neighbo rs if they all co n verge to the same poin t. Assumption 1 ensures that all n odes co n verge to the same p oint deter m ined b y the glo b ally reachable node o r nodes. The glo bally reachab le node can be uniq u e, wh ich is referred to as lead er , or belo n gs to a strongly c o nnected compon ent of th e g raph in which case all th e nodes in the strongly co nnected c o mponen t are reach able by other nodes o f the graph . Leader is stationary since it has no neighbo rs an d all oth er nodes converge to it. If th e re is mor e than one globally reach able nod e, the con vergence point of th e strongly co nnected comp onent comp osed of globally reachable nodes determ ines the final conver gence point. In the linear consensus proble m with controller ˙ x i = P j ∈N + i x j − x i , the same assump tion is sufficient for con- sensus [16]. I nstead of sensing graphs, th e con ven tion is to use commun ication graphs where edges show the direction of informa tio n flow and are essentially the the reverted version of the sensing grap h s by definition. For a com munication graph, the assumption 1 is equiv alen t to ¯ G having a dir ected spanning tree. First we sho w th a t the equilibr ium po ints of (19) are in J . Later , we introduce the maximu m distance between any pair of nodes as a L yapu nov function f or (1 9) and prove stability . Lemma 3 : Under assumption 1, ˙ x = 0 if an d on ly if consensus is reached . Pr oof: If no two neighb oring agents are colliding at an instance, all edge weights are positive ( w k > 0 ) and ˙ x = ˘ L + x where ˘ L + = L + ⊗ I d and L + is the weigh ted Laplacian of a graph with a g lo bally reachable n ode. L + has rank n − 1 [15, Lemma 2] with 1 n being the eigenv ector correspon ding to the single zero eigen value while other eigenv alues are positive. Th erefore, null( ˘ L + ) = J and ˙ x is zero whenever x ∈ J which m eans th at agents are in consensus. If th ere are some coincident neighbo rs in formation F = ( G , x ) , say x p = x q for q ∈ N • p , since the weight of edges co nnecting coinciding agents is zer o we can a ssum e tho se edges (i.e. ( p, q ) ) are r emoved. W e g roup such no des p an d a ll q ∈ N • p and all r ∈ N • q and so o n recursively into sets {Q i } n ′ i =1 with n ′ < n . W e in troduce a new formation F ′ = ( G ′ , x ′ ) with n ′ vertices where node i is co nnected to j in G ′ if exists at least a vertex in Q i connected to a vertex in Q j in G . Since connectivity is maintained in this transfor mation, G ′ also has a globally reachab le nod e . W e set x ′ i = x q for any q ∈ Q i and ˙ x ′ i = P q ∈Q i ˙ x q . Since n odes of G ′ are not co incident, ˙ x ′ 6 = 0 wh ich y ields ˙ x 6 = 0 . Now , we will show globa l stability of co ntroller (19). Theor em 3: Contro ller (19) achieves con sensus under as- sumption 1. Pr oof: T ake the non-sm o oth L ya p unov functio n V ( x ) = ma x p,q ∈V k x p − x q k to be maxim u m eu clidean distance between the nod es of G . Since V ( x ) = 0 mea n s all nodes are coincident, x must belong to the subspace J . Now we only need to show that ˜ L X V ( x ) < 0 . Let p and q b e the only two n odes with m aximum distance d pq . Let e pq = x q − x p k x q − x p k be the unit vecto r pointing to q fr om p . Hence, ∂ V ∂ x p = − e pq and ∂ V ∂ x q = e pq while o ther derivati ves are zero. Unless either p or q is the leader, both nod es have neighb ors. For any k ∈ N p , we can write x q − x p = x q − x k + x k − x p , o r eq uiv alently d pq e pq = d pk u pk + d kq e kq with d pk , d kq < d pq . T aking a dot product of b o th sides with e pq , we get e T pq u pk > 0 . Theref o re, since ˙ x p = P k ∈N p u pk we get e T pq ˙ x p > 0 . Same argument is valid for q if q is not the leader . Hence , ˜ L X V ( x ) = e T pq ( ˙ x q − ˙ x p ) < 0 . Now suppo se there is mo re than a sing le p air of nod es with maximum distance b etween them, p robably with some coinciding nodes. In th is case, Ω V is the set of all position s such that there exists more th a n one pair of no des with maxim um distance and D V ( x ) is the con vex hull of limits of deriv a tives of V ( x ) as x is app roached from outside of Ω V . T h erefore, for any p air { p, q } with max imum distance we have y ∈ D V such that y p = − y q = − e pq and oth er entries are ze ro, and D V is th e con vex hull of such vectors. Moreover , fr om the earlier argum ent we have ˙ x T y < 0 . If non e of the pairs with maximum distance ar e coincident with any of their n eighbor s, we have K [ X ]( x ) p = ˙ x p for any n ode p from the pair s a n d consequen tly ˙ x T ζ < 0 for any ζ ∈ D V . Theref ore, ˜ L X V ( x ) is the inter section of negative v alu es which is either n egati ve or empty . In the case that a node from a p air is coinciden t with a neighbor, say p is coinc id ent with p ′ ∈ N p from { p, q } , then { p ′ , q } is also a pair with maximu m distance. W e have K [ X ]( x ) p = ˙ x p + ǫ for ǫ ∈ ¯ B d ( 0 , 1) and K [ X ]( x ) p ′ = ˙ x p ′ . In this case ˜ L X V becomes the intersection over the inn er produ ct o f members of two sets, an d since for the p air { p ′ , q } the Lie deriv ative is negative, the inter section is again eith er negativ e o r empty . Ther e f ore, fro m Theo rem 1 a sy mptotic stability of consen sus follows. Theorem 3 o nly establishes asymp totic stability . Ho w ever , from o bservation it ca n be seen the convergence happ e ns in finite time. A framework with a directed g raph G satisfying assumption 1 and with dyn amics given in (1 9) can be seen as a cascade sy stem . Partitioning G in to strongly co nnected compon ents, each com p onent is seen as a subsystem. Since there is path between e very subsystem to the compon ent containing the globally reacha b le node(s), subsystems f orm a directed acyclic graph with a single leaf. Th erefore, the first step in proving finite- time convergence of (19) is to show finite-time conver g ence in strong ly co nnected graph s. Here, we present a conjec tured upp er boun d o n the co n vergence time in strongly con nected grap hs. Conjectur e 1 : In a stron gly connected graph with n no des, conv ergen ce of contro ller (19) happen s in finite time an d the conv ergen ce time is up p er bou nded by l 2 n sec 2 ( π n ) where l is th e sum of distances between no des over the long est hamiltonian cycle in the initial formatio n at t 0 . I V . B E A R I N G - O N L Y F O R M A T I O N C O N T RO L The goal of bearing- only fo rmation control is to achieve and maintain a desired fo rmation sp ecified b y b earings f or each edge in the sensing graph using only bea r ing measu r e- ments, as opposed to linear form ation con trol which requires relativ e p o sitions instead o f b e arings. Linear formatio n contr ol p roblems draw ad vantage fro m the linear ity o f the controller ˙ x = − Lx in the c o nsensus problem . A simp le change of variables leads to exponential conv ergen ce to a desired forma tion cong ruent to x ∗ by means of ˙ x = − L ( x − x ∗ ) which only differs by a constant term Lx ∗ . In this section, we add ress the nonlinear formation control pr oblem using bearings for un directed and directed sensing graph s. Similar to th e linear pro blem, the contr ollers propo sed are of the fo rm ˙ x = f ( x ) − f ( x ∗ ) and differ by a constant term − f ( x ∗ ) compar ed to con sen sus con tr ollers ˙ x = f ( x ) introd u ced in the p r evious section. Specifically , w e prove L yapunov stability of Filippov solu- tions of the controller given in [14] for un directed graphs and also prove cascade stab ility of the aforemen tioned controller for direc ted acyclic graphs. For dir ected cyclic graph s, we present an example which shows that the Jacobian matr ix of the con troller in [14 ] may have eig en values with positive real parts. Alon g th e same line, we pre sen t another example that shows direc ted be a ring Lap la c ia n matr ix may have eigenv alues with n egati ve r eal parts, r ejecting the conjecture in [18] . A. Undir ected graphs Giv en an und ir ected graph G , the following non-smo oth and non-conve x edge potential function was suggested in [14] (as reform ulated in [18 ]): ψ { i,j } ( x i , x j , u ∗ ij ) = 1 2 d ij k u ij − u ∗ ij k 2 , (20) which is zero only if u ij equals to u ∗ ij or if d ij is zero. Similar to the undir e cted consen sus problem, summing th ese terms over all edg es yields the following objective function: ψ ( x , u ∗ ) = X { ( i,j ) , ( j,i ) }⊆E ψ { i,j } ( x i , x j , u ∗ ij ) (2 1 ) By setting the velocity o f ea c h node to be th e n egative of the grad ient of ψ with r espect to its p osition, we obtain the controller given in [14]: ˙ x i = − ∂ ψ ∂ x i = X j ∈N i u ij − u ∗ ij , (22) which can be written in th e agg regated form as: ˙ x = H ( u − u ∗ ) . (23) Similar to the po tential f unction in the consensu s prob lem, ψ { i,j } is not differentiable when d ij is zero and (23) there- fore beco mes discon tinuous when two agents are co liding. Denoting (23) by X , the set valued m a p o f X is given by: K [ X ]( x ) = − D ψ ( x ) = H ( u − u ∗ ) ⊕ I (24) where I is defined in (17). Similar to the undir e cted consensus pr o blem, asymptotic stability can be established by using (21) as L yap unov function . Pr oposition 2: Controller (23) is asympto tically stable. Pr oof: Follo win g th e pr oof o f Theor em 2 , we ha ve max ˜ L X ψ ( x ) = −k H ( u − u ∗ ) k 2 ≤ 0 . It was sh own in [14][Pr oposition 3] that H ( u − u ∗ ) equ a ls zero if and on ly if u ij = u ∗ ij for every ( i, j ) ∈ E . As a result of this, a formatio n F = ( G , x ) with initial position x 0 will co nverge to a fo rmation x ⋆ which is similar to x ∗ . If th e forma tio n is bearing rigid, x ⋆ is also similar to x ∗ . Fu rthermor e, fo llowing th e same argument fr o m Lemma 2, it can be shown that th e centroid o f Filippov solution s of (23) is inv ariant. B. Dir ected graphs In this section we con sider the controller ( 23) for directed sensing graph s, given by: ˙ x i = X j ∈N + i u ij − u ∗ ij , (25) which can be written in th e agg regate form as: ˙ x = H + ( u − u ∗ ) . (26) W e assume that each ag ent o nly acts b a sed on the measuremen ts direc tly obtained b y itself. Similar to th e directed con sensus problem, each agent i has its own private function ψ i ( x , u ∗ ) = P j ∈N + i ψ { i,j } which tries to minimize thorou gh grad ient descent. Evaluating the rate at which ψ i de- creases is difficult since it is also de pendent on th e dynamics of neighbor s of i . In the directed con sensus pro blem, we were able to use the maximum distance b etween nodes as a g lo bal metric to measu r e how far the system is f r om equilibrium . For the problem at hand, finding a similar glo bal metric seems u nrealistic an d the only option left is to investigate the ev o lu tion of pr i vate fun ctions. W e b egin by showing that if the sensing graph is a directed cycle, we can use ψ ( x , u ∗ ) to prove stab ility of (26). Later we gi ve in tuition on the equilib ria of ψ i s and prove conver g ence of dir e cted acyclic grap hs. Pr oposition 3: Controller (26) is asymptotically stable for a directed cycle gr aph. Pr oof: In a directed cycle, we have ˙ x i = u ij − u ∗ ij where j ∈ N + i is the on ly neigh bor of i . Also, we h av e ∂ ψ ∂ x i = − ( u ij − u ∗ ij ) − ( u ik − u ∗ ik ) whe r e i ∈ N + k . Assuming collisions do not occu r , we h a ve: ˙ ψ = X i ∈V − [ u ij − u ∗ ij + u ik − u ∗ ik ] T ( u ij − u ∗ ij ) = X i ∈V ( −k ˙ x i k 2 + ˙ x T i ˙ x k ) which is due to ˙ x k = u ki − u ∗ ki . Since there ar e as many edges as nodes, we can rewrite ˙ ψ over edges as: ˙ ψ = X ( k,i ) ∈E − 1 2 k ˙ x i k 2 + ˙ x T i ˙ x k − 1 2 k ˙ x k k 2 = X ( k,i ) ∈E − 1 2 k ˙ x i − ˙ x k k 2 ≤ 0 Hence ˙ ψ is always n egati ve unless all nodes have th e same velocity ˙ x i = ˙ x k . Suppose all ˙ x i = w , then we ha ve u ij − w = u ∗ ij . T aking the norm of both sides, we get w T u ij = 1 2 k w k 2 . Further more, we have P i ∈V d ij u ij = 0 , hence taking a d ot produc t with w we get P i ∈V d ij w T u ij = P i ∈V d ij 2 k w k 2 = 0 wh ich m eans w = 0 . When th e out-degree of a node i is one, as in a dir e c ted cycle graph, the equilibrium points o f its objective fun ction ψ i is a half- lin e th at starts a t the position of its neighbo r and extend s to infinity in the dir e ction of − u ∗ ij . If the out- degree is mo r e than one, the equilibriu m p oint(s) of ψ i are 1 2 3 4 (a) 1 2 3 4 (b) 1 2 3 4 (c) 1 2 3 4 (d) Fig. 1: In ( a) an d (b) sum of the bearing measu rements of nodes with th e same ind ex is equal but the fo r mations are not equiv alen t, which mea ns the underlyin g g raph is not be a ring persistent. (c) and (d) are bearin g pe r sistent gr a phs. Graph in (c) is bearin g rigid as well while (d) is not. such th at P j ∈N + i u ij = P j ∈N + i u ∗ ij . This, howe ver, does not necessarily m ean that the bearing measu r ement of each neighbo r u ij is equ al to the desired bearing u ∗ ij assuming th e equilibriu m p oint(s) exists. Befor e we discuss the existence of equilibrium p o ints, we present the th e following de finition which is motiv ated by this pro blem. Definition 1 (Bea rin g P ersistence): A d irected g raph G is bearing pe r sistent such that for any x and x ∗ ∈ R dn and all i ∈ V , P j ∈N + i u ij − u ∗ ij = 0 if an d only if x and x ∗ are equiv alen t. Remark 1: A bear ing persistent framework may not be baring rigid. The opposite dir ection is also tru e (see Fig. 1). Also, It can b e immediately deduce d th at undir ected graphs and directed graph s with out-degree on e are bear ing persistent. Even if th e sensing g raph is not bearin g persistent, it is no t trivial to study th e equilibr ia o f (26). In some applications, achieving the exact b earings between th e agents might not be imp ortant, but rath e r the overall placem e nt of an agen t with r espect to tho se it observes is. Her e we p resent a short and inform al proo f on uniq u eness of equilibr ium of (2 5). The equilibrium po int of (25) for ag e n t i with |N + i | > 1 is a point such th a t P j ∈N + i u ij = P j ∈N + i u ∗ ij = v ∗ . If k v ∗ k = |N + i | , then x i → ∞ if neig h bors o f i are no t all coinciden t. Hence we assum e that alw ay s k v ∗ k < |N + i | , or th e giv en desired bearin gs for an agent are n ot collinear . Controller (2 5) steers i to a point wher e the sum of its bearing measurem ents equals v ∗ . T he following d efinition is motiv ated by this b ehavior . Definition 2: a k -ellipsoid is the set o f po in ts such that sum o f their eu clidean distanc es from k fixed poin ts { p i ∈ R d } k i =1 called f oci is constan t. Let ϑ ( y ) , P k i =1 k y − p i k be the sum of distances to foci fro m p oint y . A k -ellipsoid denoted as Υ( ρ ) is the boun d ary o f the set-valued map • p 1 p 2 p 3 p Fig. 2: Multiple concentric 3-ellipses (blue curves) with foci { p i } 3 i =1 . Po int p is the g eometric median of focal points. Direction of gradien t of ϑ ( . ) do es no t ch ange alo n g each black curve starting fro m p , and its magnitu d e do es not change along red curve. Θ( ρ ) = { y ∈ R d | ϑ ( y ) ≤ ρ } for a given ρ ≥ ρ ⋆ where ρ ⋆ = min y ϑ ( y ) . Θ( ρ ) is a sublevel set of of a convex fu nction and is therefor e a bounded co n vex set. Υ is a closed conve x sur face and is smooth if it does not co ntain any of the fo cal points [10]. Let v i , p i − y k p i − y k be the unit vector po inting towards p i from y . Gr adient o f the fu nction ϑ ( y ) at a poin t y 6 = p i is given by ∂ ϑ ∂ y = P k i = i − v i and its Hessian is given by ∂ 2 ϑ ∂ y 2 = P k i = i 1 k p i − y k P ( v i ) . Hessian of ϑ ( y ) is p o siti ve definite unless fo c i are collinear . Even if that is the case, it can easily be shown that ϑ ( y ) is strictly con vex a long any line except the line tha t contains the foci. Using this fact, it can be argued that Υ( ρ ) for ρ > ρ ⋆ does not c o ntain a line segment and the direction o f gradient of ϑ ( y ) or P k i =1 − v i which is parallel to the tangen t hyperp lane of Υ( ρ ) is unique on Υ( ρ ) . Furtherm ore, at the geometric median (or line segment) k P k i =1 v i k is zero but as k y k → ∞ we have k P k i =1 v i k → |N + i | . Due to co n vexity of ϑ ( . ) , D ϑ ( y ) must attain any direction and any length between z e ro and |N + i | due to b eing a m onotone f u nction [7] (see Fig. 2). Having established uniqueness o f the eq uilibrium point, it is straig htforward to pr ove stability of (26) for directed acyclic gra p hs. Leaves o f a directed acyclic graph does not have any neighb ors and ar e stationary . W e define the degr ee of cascad e of a node to be the length of the lo ngest path fro m that no d e to a leaf of the graph and is uniqu e due to ab sen ce of cycles. Startin g f rom d egre e one to higher degrees, nod es reach their equilibr ium. 1 2 3 4 5 6 7 (a) Directed graph with global ly reachable nodes 0 1 2 3 4 5 0 5 10 ϕ max( k x i − x j k ) max( k x i − x j k ) ′ (b) Plot of Lya punov functions Fig. 3: The red points co rrespond to the u ndirected version of the gr aph in (a) and the blue points co rrespond to the direc te d graph. T h e m a genta plo t in (b) correspon ds to the strongly connected compone n t 1-2 -3-4. Th e prop osed upper-boun d on conv ergen ce tim e l 4 sec 2 π 4 is √ 2 which is exact in this case fo r the stron gly con nected co mponen t 1- 2-3-4. 1 2 3 4 (a) Desired formation 1 2 3 4 (b) Initi al formati on and tra- jecto ries 0 1 2 3 4 5 0 2 4 6 8 10 ψ ψ d ψ c (c) Plot of L yapunov funct ions Fig. 4 : T ra jec tories of an u n directed g raph ( red), a directed g r aph (b lue), and th e cycle gra p h 1-2 -4-3 (gre en). For th e case o f directed g raphs with cycles, provin g stability still r e m ains a challenge . On e natur a l first step could be to see if equ ilib rium p oints of (26) a r e Hu rwitz- stable with respect to perturb ations. Jacobian matrix of (26) is given by H + R B | x ∗ or - H + diag( 1 d ∗ ij P ( u ∗ ij )) H T , where R B is called the b earing rigidity matrix . This matrix is very similar to the dir e cted bearing Laplacian matrix L B = H + diag( P ( u ∗ ij )) H T defined in [18]. For the graph g i ven in Fig . 1c with po sitions x 1 = [0 , 0] T , x 2 = [2 , 0 ] T , x 3 = [3 , − 4 ] T , and x 4 = [2 , − 2 ] T , Jacobian matrix of (2 6) and − L B both have an eigenv alue with a positive real part, which rejects the conjecture m ade in [18] o n bear ing Laplacian matrix having eigenv alu es with n onnegative real par ts. V . S I M U L A T I O N R E S U LT S In this section, we presen t simulatio n r e sults f or th e bo th bearing- only co n sensus and formation con tr ol problem s. In Fig. 3, the trajectory of an undirected and dir ected graph with the same vertices is g i ven for the consensu s pro blem. In Fig. 4, trajecto ries of an undir e cted graph, a strongly connected g raph an d a dire c ted cycle g raph is p resented fo r the form ation contro l proble m . V I . C O N C L U S I O N S W e pr esented stability results for th e bea ring-on ly co nsen- sus and formation co n trol pro blems. There are remaining problem s which need fu rther attention. In the co n sensus problem o f stro ngly con n ected directed graph s, fin ite-time conv ergen ce rem ains un solved. Also, bearing - only form ation control in cyclic d irected graphs is not addressed yet and the notion of b earing persistence needs more stud y in the future. R E F E R E N C E S [1] F . Arrigoni and A. Fusiello. Bearing-based network localiz ability: a unifying vie w . IE EE transactions on pattern analysis and mac hine intel lig ence , 2018. [2] A. Bacc iotti and F . Ceragiol i. Stability and stabilizati on of discontin- uous systems and nonsmooth lyapuno v functions. ESAIM: Contr ol, Optimisati on and Calculus of V ariations , 4:361–37 6, 1999. [3] A. N. Bishop, M. Degha t, B. D. Anderson, and Y . Hong. Distribute d formation control with relaxe d motion requirements. Internation al J ournal of R obust and Nonlinear Contr ol , 25(17): 3210–3230, 2015. [4] J. Cort ´ eS. Finite-ti m e con verge nt gradient flows with appli cations to netw ork consensus. Automatic a , 42(11):1993–2 000, 2006. [5] J. Corte s . Discontinuou s dynamical systems. IEEE Contr ol systems magazin e , 28(3):36–73, 2008. [6] J. Cort ´ es and F . Bullo. Coordina tion and geometri c optimizati on via distribute d dynamical systems. SIAM Journal on Contr ol and Optimizati on , 44(5):1543–1574, 2005. [7] R. Kac hurovskii. Monotone operators and con ve x functional s. Uspekhi Matemat ich eskikh Nauk , 15(4):213–21 5, 1960. [8] A. Karimian and R. Tron. Theory and methods for bearing rigidity reco very . In 2017 IEE E 56th Annual Confer ence on Decision and Contr ol (CDC) , pages 2228–2235. IEEE , 2017. [9] S. Minsker et al. Geometric median and robust estimati on in banach spaces. Bernoulli , 21(4):230 8–2335, 2015. [10] J. Nie, P . A. Parrilo, and B. Sturmfels. Semidefinite representati on of the k-elli pse. In Algorithms in alge braic geome try , pages 117–132. Springer , 2008. [11] R. Olfa ti-Saber and R. M. Murray . Consensus problems in netw orks of agents with switching to pology and time-delay s . IEEE T ransactions on automatic contr ol , 49(9):1520–15 33, 2004. [12] F . Schiano and R. Tron. The dynamic bearing observ ability matrix nonline ar observ ability and estimat ion for multi-agen t systems. In 2018 IEEE Internationa l Confer ence on Robotics and Automati on (ICRA) , page s 1–8. IEEE , 2018. [13] M. H. Trinh, S. Zhao, Z. Sun, D. Zelazo, B. D. Anderson, and H. -S. Ahn. Beari ng-based formation control of a group of agent s with leade r- first follo wer structure. IEEE T ransact ions on Automatic Contr ol , 64(2):598– 613, 2018. [14] R. T ron, J . Thomas, G. Loianno, K. Daniilidi s , and V . Kumar . Bearing- only formation control with auxiliary distanc e measurement s, leade rs , and collision avoida nce. In 2016 IE E E 55th Confer ence on Decision and Contr ol (CDC) , pages 1806–1813. IEEE , 2016. [15] C. W . W u. On rayleigh– ritz ratios of a generalized laplacia n matrix of directed graphs. Linear algebra and its applic ations , 402:207–227, 2005. [16] C. W . Wu. Synchronizat ion in networ ks of nonlinear dynamical systems coupled via a dire cted graph. Nonlinearity , 18(3):1057, 2005. [17] D. Zelazo, P . R. Giordano, and A . Franchi. Bearing -only formation control using an se (2) rigidity theory . In 2015 54th ieee confer ence on decision and contr ol (cdc) , pages 6121–6126. IEEE, 2015. [18] S. Z hao and D. Zelazo. Bearing-ba s ed formatio n stabilizat ion with direct ed interacti on topologies. In 2015 54th IEE E Confer ence on Decision and Contr ol (CDC) , pages 6115–6120. IEEE, 2015. [19] S. Zhao and D. Zelazo. Bearing rigidity and almost global bearing- only formation sta biliz ation. IEEE T ransactio ns on Aut omatic Contr ol , 61(5):1255 –1268, 2015. [20] S. Zhao and R. Zheng. Fle xible bearing-only rendezvous control of mobile robots. In 2017 36th Chinese Cont rol Confe re nce (CCC) , pag es 8051–8056. IEEE, 2017.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment