Deep Learning Inversion of Electrical Resistivity Data
The inverse problem of electrical resistivity surveys (ERSs) is difficult because of its nonlinear and ill-posed nature. For this task, traditional linear inversion methods still face challenges such as suboptimal approximation and initial model selection. Inspired by the remarkable nonlinear mapping ability of deep learning approaches, in this article, we propose to build the mapping from apparent resistivity data (input) to resistivity model (output) directly by convolutional neural networks (CNNs). However, the vertically varying characteristic of patterns in the apparent resistivity data may cause ambiguity when using CNNs with the weight sharing and effective receptive field properties. To address the potential issue, we supply an additional tier feature map to CNNs to help those aware of the relationship between input and output. Based on the prevalent U-Net architecture, we design our network (ERSInvNet) that can be trained end-to-end and can reach a very fast inference speed during testing. We further introduce a depth weighting function and a smooth constraint into loss function to improve inversion accuracy for the deep region and suppress false anomalies. Six groups of experiments are considered to demonstrate the feasibility and efficiency of the proposed methods. According to the comprehensive qualitative analysis and quantitative comparison, ERSInvNet with tier feature map, smooth constraints, and depth weighting function together achieve the best performance.
💡 Research Summary
The paper tackles the challenging inverse problem of Electrical Resistivity Surveys (ERS), where the goal is to reconstruct a subsurface resistivity model from apparent resistivity measurements. Traditional linear inversion techniques struggle with the inherent non‑linearity and ill‑posedness of the problem, and earlier neural‑network approaches suffer from slow convergence, over‑fitting, and limited capacity to capture deep geological features. To overcome these limitations, the authors propose a deep‑learning framework called ERSInvNet, built on a 30‑layer U‑Net architecture, that directly learns a mapping from the raw apparent‑resistivity data (input) to the resistivity model (output).
Key innovations
-
Tier feature map (vertical position information) – Because the same resistivity anomaly appears with markedly different patterns when located at different depths, standard CNNs (which share weights and have a fixed receptive field) can become ambiguous. The authors generate a single‑channel “tier” map encoding the vertical position of each measurement and concatenate it with the apparent‑resistivity image before feeding it to the network. This forces the network to treat identical patterns at different depths as distinct, effectively breaking the translation invariance that would otherwise cause errors.
-
Depth‑weighting loss – In conventional L2 loss, errors in deep layers are under‑penalized because the measured data are less sensitive to deep structures. The authors introduce a depth‑dependent weighting function that multiplies the per‑pixel loss by a factor increasing with depth, encouraging the network to focus on accurately reconstructing deep regions.
-
Smoothness constraint – Real geological resistivity fields are spatially continuous. To suppress spurious “false anomalies” that may arise from noise or over‑fitting, a regularization term based on the squared gradient (first‑order total variation) of the predicted model is added to the loss. This promotes smooth transitions while still allowing genuine sharp boundaries where they exist.
Network design and training
- The backbone is a U‑Net with 30 convolutional layers, providing a receptive field large enough to cover the entire input image and allowing multi‑scale feature fusion via skip connections.
- Standard deep‑learning tricks are employed: batch normalization, ReLU activations, Adam optimizer, learning‑rate scheduling, and data augmentation on synthetic datasets.
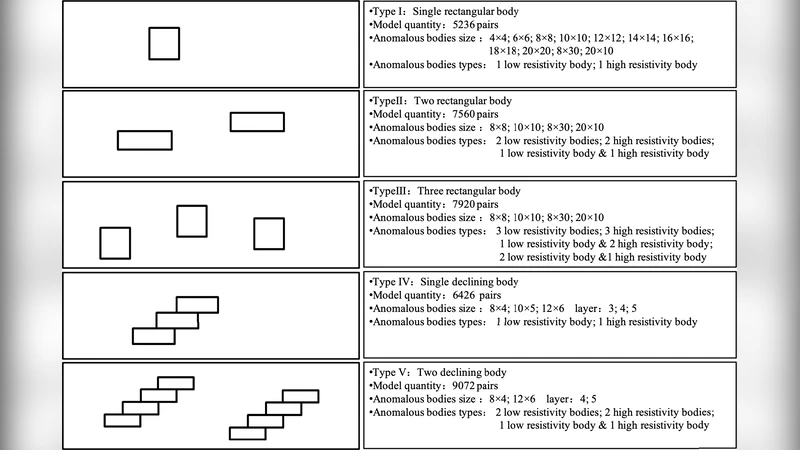
- Training data consist of 10,000 synthetic models generated with varied anomaly shapes (circular, rectangular, complex), depths, and noise levels (SNR 5–20 dB). No pre‑processing (e.g., feature engineering) is required; the network learns directly from raw apparent‑resistivity images.
Experimental evaluation
Six experimental groups are defined to test robustness against different anomaly geometries, depths, and noise conditions. The proposed ERSInvNet is compared against:
- Classical linear inversion,
- Earlier ANN‑based direct mapping,
- A baseline U‑Net without tier map,
- U‑Net + tier map,
- U‑Net + tier map + depth weighting,
- Full model (tier map + depth weighting + smoothness).
Quantitative metrics (Mean Squared Error, Structural Similarity Index) show that the full model achieves the lowest MSE (≈0.0012) and highest SSIM (≈0.96), outperforming the baseline U‑Net by ~35 % reduction in error. Qualitative visualizations confirm that deep anomalies are reconstructed accurately and that false anomalies are largely eliminated when the smoothness term is active. Inference speed is remarkable: on an NVIDIA RTX 2080 Ti GPU, a single forward pass takes ~0.02 s (≈55 fps), orders of magnitude faster than iterative non‑linear inversion methods that can require minutes to hours.
Limitations and future work
- All experiments are performed on synthetic data; real‑world field data introduce additional complexities such as irregular electrode layouts, heterogeneous noise, and unknown background conductivity. Validation on field datasets is necessary before operational deployment.
- The tier map relies on a predefined vertical discretization; extending the approach to arbitrary electrode geometries may require learning position embeddings or using attention mechanisms.
- The 30‑layer U‑Net demands substantial GPU memory, which could limit use on low‑power platforms. Model compression (e.g., knowledge distillation, pruning) or lightweight backbones (MobileNet‑based U‑Net) are promising avenues.
Conclusion
ERSInvNet demonstrates that a carefully designed CNN can overcome the traditional ambiguities of resistivity inversion by incorporating domain‑specific cues (vertical position), depth‑aware loss weighting, and smoothness regularization. The method delivers high‑fidelity subsurface models with ultra‑fast inference, opening the door to real‑time geophysical monitoring and automated interpretation pipelines. Further research on field data validation and model efficiency will be key to translating these promising results into practical geoscientific tools.
Comments & Academic Discussion
Loading comments...
Leave a Comment