Uncertainty amplification due to density/refractive-index gradients in volumetric PTV and BOS experiments
We theoretically analyze the effect of density/refractive-index gradients on the measurement precision of Volumetric Particle Tracking Velocimetry (V-PTV) and Background Oriented Schlieren (BOS) experiments by deriving the Cramer-Rao lower bound (CRLB) for the 2D centroid estimation process. A model is derived for the diffraction limited image of a particle or dot viewed through a medium containing density gradients that includes the effect of various experimental parameters such as the particle depth, viewing direction and f-number. Using the model we show that non-linearities in the density gradient field lead to blurring of the particle/dot image. This blurring amplifies the effect of image noise on the centroid estimation process, leading to an increase in the CRLB and a decrease in the measurement precision. The ratio of position uncertainties of a dot in the reference and gradient images is a function of the ratio of the dot diameters and dot intensities. We term this parameter the Amplification Ratio (AR), and we propose a methodology for estimating the position uncertainties in tracking-based BOS measurements. The theoretical predictions of the particle/dot position estimation variance from the CRLB are compared to ray tracing simulations with good agreement. The uncertainty amplification is also demonstrated on experimental BOS images of flow induced by a spark discharge, where we show that regions of high amplification ratio correspond to regions of density gradients. This analysis elucidates the dependence of the position error on density and refractive-index gradient induced distortion parameters, provides a methodology for accounting its effect on uncertainty quantification and provides a framework for optimizing experiment design.
💡 Research Summary
This paper presents a comprehensive theoretical analysis of how density and refractive‑index gradients affect the measurement precision of Volumetric Particle Tracking Velocimetry (V‑PTV) and Background Oriented Schlieren (BOS) experiments. The authors derive the Cramér‑Rao Lower Bound (CRLB) for the two‑dimensional centroid estimation process, explicitly incorporating the influence of density gradients on the imaging of particles or dots.
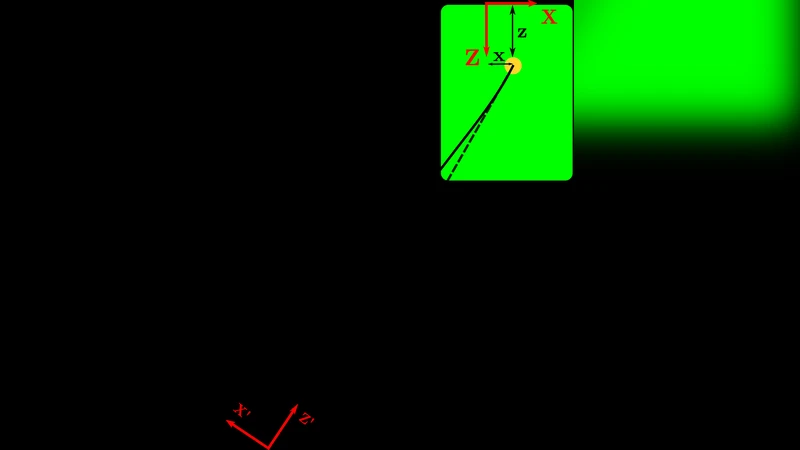
The imaging model starts from a point‑source representation of each particle/dot, where many light rays emanate, travel through a medium with spatially varying refractive index, and are finally recorded by a camera. The authors first treat a head‑on viewing geometry, expressing the image coordinate as the sum of a magnification term and an apparent displacement term that depends quadratically on particle depth and linearly on the path‑averaged density gradient. The point‑spread function (PSF) of the optical system is approximated by a Gaussian (derived from the Airy diffraction pattern), allowing the composite image of all rays to be represented as an “effective Gaussian” with a shifted centroid and an enlarged standard deviation.
To handle arbitrary camera orientations, a rotation matrix (pitch, yaw, roll) and a translation vector are introduced, yielding a linear transformation between object‑space and image‑space coordinates. In this generalized framework the apparent displacement becomes a tensor contraction involving the viewing direction and the gradient tensor, showing that the displacement is maximal when the gradient is orthogonal to the camera line‑of‑sight.
A key contribution is the definition of an Amplification Ratio (AR), which quantifies how much the density gradient amplifies the effective particle/dot size and reduces its intensity. The AR is expressed as
\
Comments & Academic Discussion
Loading comments...
Leave a Comment