Multiple target tracking based on sets of trajectories
We propose a solution of the multiple target tracking (MTT) problem based on sets of trajectories and the random finite set framework. A full Bayesian approach to MTT should characterise the distribution of the trajectories given the measurements, as it contains all information about the trajectories. We attain this by considering multi-object density functions in which objects are trajectories. For the standard tracking models, we also describe a conjugate family of multitrajectory density functions.
💡 Research Summary
The paper introduces a novel Bayesian framework for multiple target tracking (MTT) that treats the collection of target trajectories as a random finite set (RFS). Traditional RFS‑based multitarget filters (e.g., PHD, CPHD) estimate only the current set of targets, providing a sequence of multitarget densities that lack the full temporal correlation needed to answer trajectory‑level queries such as “what is the probability that a target was in region A at time t₁ and in region B at time t₂?”. To address this limitation, the authors define a trajectory as a tuple (t, i, x₁:ᵢ) where t is the birth time, i the length, and x₁:ᵢ the ordered sequence of target states. A set of such trajectories, denoted 𝓧, constitutes the state of the whole tracking system. By modeling 𝓧 as an RFS, they derive a multitrajectory density—an analogue of the multitarget density but with trajectories as the elementary objects. This density fully characterises the posterior distribution of all trajectories given the measurement history, thereby enabling any trajectory‑related inference (MAP trajectory estimation, region‑to‑region transition probabilities, etc.).
The authors argue that explicit labeling, common in many labelled RFS approaches, introduces unnecessary dimensionality and, more critically, label‑target association ambiguity when labels are unobservable (e.g., with IID‑cluster or Poisson birth models). Such ambiguity can cause persistent track‑switching and prevents the definition of physically meaningful performance metrics. By contrast, the trajectory‑set representation is label‑free, unique, and minimal; each physical scenario corresponds to a single mathematical object, eliminating the combinatorial explosion of equivalent labelled representations.
A conjugate family of multitrajectory densities is presented for the standard linear‑Gaussian dynamic and measurement models. The prediction step incorporates birth of new trajectories (with a specified birth RFS) and survival/death of existing ones, while the update step handles measurement association through standard RFS set‑integrals. The resulting filtering recursion is analogous to the classic Bayes‑RFS filter but operates on the space of trajectory sets. Importantly, the number of terms in the multitrajectory density is dramatically smaller than in the joint density over sequences of labelled sets, offering a more tractable foundation for algorithm design.
The paper situates the proposed approach relative to labelled RFS methods, traditional Multiple Hypothesis Tracking (MHT), and existing multitarget filters. It shows that labelled RFS can suffer from track‑switching when the birth process is an IID‑cluster RFS, and that MHT, while label‑free, incurs exponential growth in hypothesis space. The trajectory‑set framework avoids both pitfalls, providing a compact representation that still captures full posterior information.
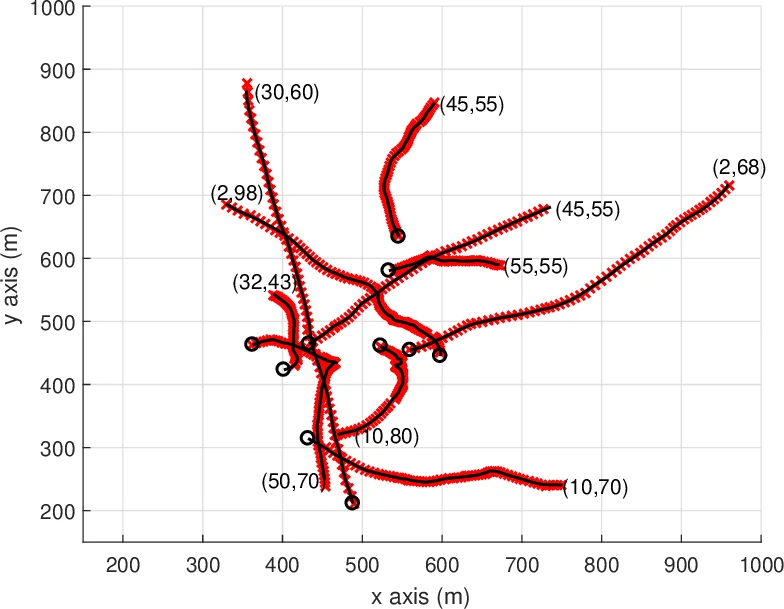
Two illustrative simulations are provided. The first demonstrates a scenario where two targets approach, cross, and separate; labelled filters exhibit ambiguous label swaps, whereas the trajectory‑set filter correctly maintains distinct trajectories. The second uses a Poisson birth model to highlight label‑association uncertainty; the trajectory‑set filter accurately recovers birth times and lengths, while labelled filters produce erroneous associations. These examples validate the theoretical claims and show practical benefits.
In conclusion, the authors establish the theoretical foundations for MTT using sets of trajectories, defining the multitrajectory density, deriving its Bayesian recursion, and presenting a conjugate density family. By removing arbitrary labels, the framework resolves track‑switching issues, reduces computational complexity, and enables physically interpretable performance metrics. Future work is suggested on developing efficient approximations (e.g., trajectory‑PHD, trajectory‑CPHD filters), extending to nonlinear/non‑Gaussian models, and applying the methodology to real‑world sensor networks and autonomous systems.
Comments & Academic Discussion
Loading comments...
Leave a Comment