Tactile Roughness Perception of Virtual Gratings by Electrovibration
Realistic display of tactile textures on touch screens is a big step forward for haptic technology to reach a wide range of consumers utilizing electronic devices on a daily basis. Since the texture topography cannot be rendered explicitly by electrovibration on touch screens, it is important to understand how we perceive the virtual textures displayed by friction modulation via electrovibration. We investigated the roughness perception of real gratings made of plexiglass and virtual gratings displayed by electrovibration through a touch screen for comparison. In particular, we conducted two psychophysical experiments with 10 participants to investigate the effect of spatial period and the normal force applied by finger on roughness perception of real and virtual gratings in macro size. We also recorded the contact forces acting on the participants’ finger during the experiments. The results showed that the roughness perception of real and virtual gratings are different. We argue that this difference can be explained by the amount of fingerpad penetration into the gratings. For real gratings, penetration increased tangential forces acting on the finger, whereas for virtual ones where skin penetration is absent, tangential forces decreased with spatial period. Supporting our claim, we also found that increasing normal force increases the perceived roughness of real gratings while it causes an opposite effect for the virtual gratings. These results are consistent with the tangential force profiles recorded for both real and virtual gratings. In particular, the rate of change in tangential force ($dF_t/dt$) as a function of spatial period and normal force followed trends similar to those obtained for the roughness estimates of real and virtual gratings, suggesting that it is a better indicator of the perceived roughness than the tangential force magnitude.
💡 Research Summary
This paper investigates how roughness perception differs between real physical gratings and virtual gratings rendered on a capacitive touch screen using electrovibration. Real gratings were fabricated from plexiglass with a fixed ridge width of 1 mm and groove widths ranging from 1.5 mm to 7.5 mm, yielding spatial periods of 2.5 mm to 8.5 mm. To emulate these gratings virtually, the authors modulated a low‑frequency pulse‑train envelope (e.g., 20 Hz, duty cycle 0.4) with a high‑frequency carrier (>1 kHz, typically 3 kHz) so that the resulting tangential force spectrum matched that of the real gratings while avoiding perceptible vibration.
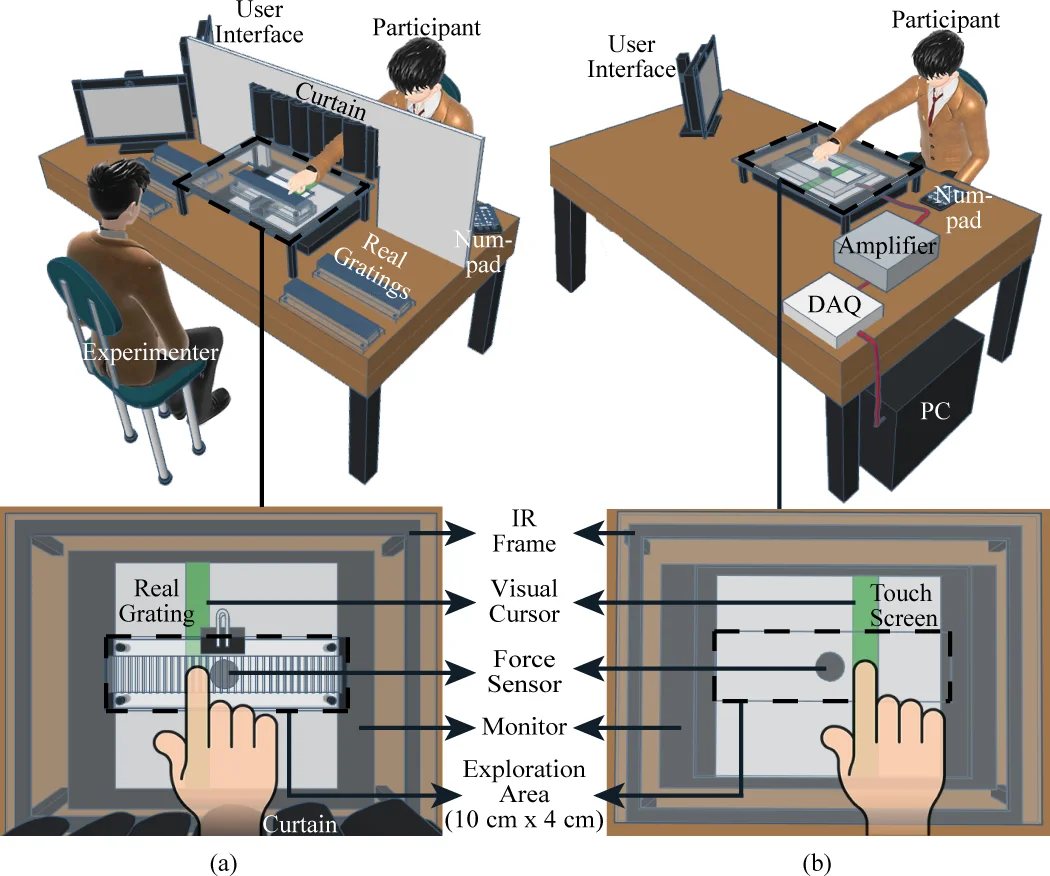
Two psychophysical experiments were conducted with ten right‑handed participants each. In Experiment 1, participants explored six spatial periods at a constant normal force of 0.75 N and rated perceived roughness. In Experiment 2, two spatial periods (2.5 mm and 8.5 mm) were tested under three normal forces (0.25 N, 0.75 N, 1.75 N). Exploration speed was kept at 50 mm/s using a visual cursor, and normal and tangential forces were recorded at 10 kHz with a Nano17 force sensor.
Key findings:
-
Spatial period effect – For real gratings, roughness ratings increased with spatial period, consistent with prior literature that larger groove widths feel rougher. Correspondingly, both the amplitude of the tangential force and its rate of change (dFₜ/dt) grew with period. In contrast, virtual gratings showed the opposite trend: larger spatial periods produced lower roughness ratings, smaller tangential‑force amplitudes, and reduced dFₜ/dt.
-
Normal‑force effect – Increasing normal force made real gratings feel rougher, while the same increase made virtual gratings feel smoother. This inversion is attributed to finger‑pad penetration: in real gratings the finger sinks into the grooves, generating additional shear forces that rise with load; virtual gratings lack any physical penetration, so higher normal force merely enlarges the contact area, reducing the modulation depth of friction and thus lowering perceived roughness.
-
Force dynamics as perceptual cue – The study demonstrates that the instantaneous rate of change of tangential force (dFₜ/dt) correlates more closely with subjective roughness than the static magnitude of the tangential force. This suggests that the tactile system is more sensitive to force gradients, aligning with known mechanoreceptor properties (e.g., SA‑I and FA‑I afferents).
Methodologically, the authors validated the virtual‑grating rendering by comparing the power spectra of real‑grating friction signals (showing peaks at integer multiples of the temporal frequency) with those of the electrovibrated signals, confirming that the pulse‑train modulation reproduces the desired periodic force pattern.
The paper contributes several important insights: (i) electrovibration can mimic the spectral characteristics of real textures but does not replicate the mechanical interaction of skin penetration; (ii) perceived roughness of virtual textures is governed by different biomechanical cues than those of physical textures; (iii) design of haptic feedback for consumer devices should consider not only friction magnitude but also the dynamics of force change.
Limitations include a modest sample size (n = 10 per experiment), focus on macro‑scale gratings only, fixed exploration speed, and potential finger‑wear effects that constrained the number of trials. Future work should explore micro‑scale textures, variable scanning speeds, and a broader set of voltage waveforms to map the multidimensional perceptual space of electrovibrated textures.
Overall, the study provides a rigorous comparison of real versus electrovibrated virtual gratings, revealing that while electrovibration can generate realistic‑looking force patterns, the underlying perceptual mechanisms differ substantially, highlighting the need for nuanced haptic design strategies in next‑generation touch interfaces.
Comments & Academic Discussion
Loading comments...
Leave a Comment