Time-Independent Planning for Multiple Moving Agents
Typical Multi-agent Path Finding (MAPF) solvers assume that agents move synchronously, thus neglecting the reality gap in timing assumptions, e.g., delays caused by an imperfect execution of asynchronous moves. So far, two policies enforce a robust execution of MAPF plans taken as input: either by forcing agents to synchronize or by executing plans while preserving temporal dependencies. This paper proposes an alternative approach, called time-independent planning, which is both online and distributed. We represent reality as a transition system that changes configurations according to atomic actions of agents, and use it to generate a time-independent schedule. Empirical results in a simulated environment with stochastic delays of agents’ moves support the validity of our proposal.
💡 Research Summary
The paper addresses a fundamental limitation of most Multi‑Agent Path Finding (MAPF) solvers: they assume that all agents move synchronously in discrete time, which does not hold in real‑world deployments where actions can be delayed, fail, or drift in time. Existing robust execution policies either force global or local synchronization (Fully Synchronized Policies, FSP) or preserve the temporal dependencies of a pre‑computed MAPF plan while communicating minimally (Minimal Communication Policies, MCP). Both approaches suffer when an agent experiences a delay: synchronization stalls the whole system, and dependency preservation can cause a single slow agent to block many others.
To overcome these issues, the authors propose a time‑independent planning framework that treats the environment as a transition system driven by atomic actions of agents, without any a‑priori timing information. Each agent’s state includes its current “tail” node, an optional “head” node (when it is moving), and a mode: contraced (stationary), requesting (has chosen a target neighbor but has not yet moved), or extended (currently traversing the edge). Transitions between modes are atomic and respect a simple occupancy predicate that guarantees vertex‑ and following‑conflict freedom. Agents are activated non‑deterministically, one at a time, and activations are assumed to be fair (every agent eventually gets a chance to act). Interactions—situations where two agents contend for the same head—are resolved through communication, allowing one agent to become extended while the other reverts to contraced.
Because the model is fully asynchronous, deadlocks can arise when a set of agents form a cyclic request pattern. The paper introduces two complementary mechanisms to guarantee reachability (the weak termination condition that every agent eventually reaches its goal at least once). First, priority inheritance: when a low‑priority agent blocks a higher‑priority one, the blocker temporarily inherits the higher priority, enabling it to move first and unblock the other. This concept, borrowed from real‑time scheduling, can cascade recursively. Second, backtracking: after a priority inheritance attempt, if the inheriting agent still cannot move, it backtracks, marking the inheritance as either “valid” (the higher‑priority agent can move next) or “invalid” (the higher‑priority agent must re‑plan). These steps are organized as a depth‑first search tree rooted at the currently highest‑priority agent, mirroring the structure of the original PIBT (Priority Inheritance with Backtracking) algorithm.
The resulting algorithm, Causal‑PIBT, extends the earlier PIBT (which relied on synchronized timesteps) to the time‑independent setting. It combines a simple greedy movement rule (choose the neighbor closest to the goal) with the priority‑inheritance/backtracking machinery. When an agent reaches its goal, its priority is lowered, allowing agents still en route to acquire higher priority, which ensures that no agent is permanently starved. The authors also show how an offline MAPF plan can be used to bias the greedy choices, improving efficiency while preserving the asynchronous guarantees.
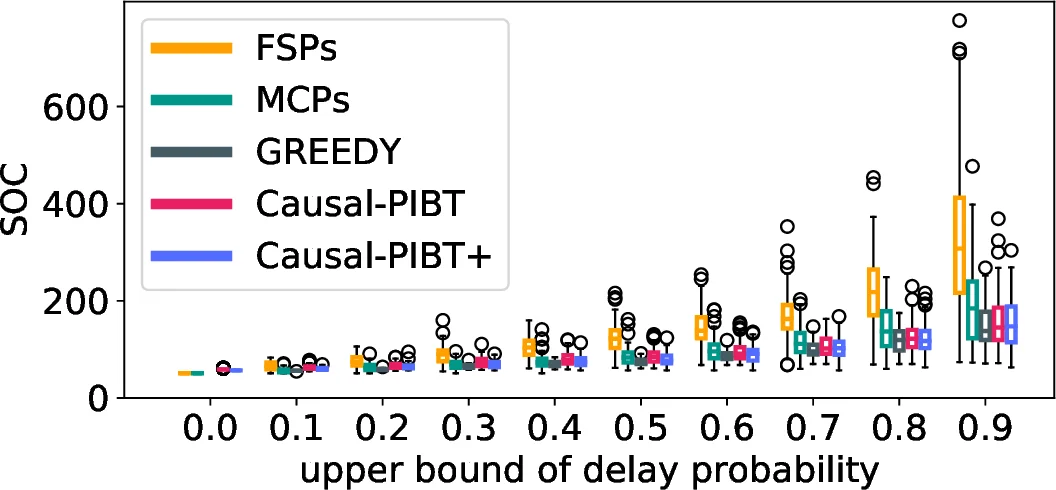
Experimental validation uses MAPF‑DP (MAPF with Delay Probabilities) to simulate stochastic move failures. The authors compare Causal‑PIBT against FSP and MCP under varying numbers of agents (up to 100) and delay probabilities (0.1–0.4). Metrics include makespan, sum‑of‑costs, number of collisions, and success rate (all agents eventually reaching their goals). Causal‑PIBT consistently achieves lower sum‑of‑costs and fewer collisions, and, crucially, it never deadlocks even at high delay rates where the baseline policies either stall or cause many agents to remain trapped. These results demonstrate that the time‑independent model and Causal‑PIBT are robust to the uncertainties inherent in real robotic systems.
The paper’s contributions are fourfold: (1) formalization of a time‑independent transition‑system model for multi‑agent movement, (2) design of Causal‑PIBT with provable reachability, (3) integration of offline MAPF plans to guide online decisions, and (4) extensive empirical evidence of robustness under stochastic delays. By removing the reliance on synchronized time, the work bridges the gap between MAPF theory and practical deployment in domains such as automated warehouses, autonomous vehicle fleets, and smart traffic management, where agents must operate asynchronously and tolerate unpredictable delays while still guaranteeing collision‑free, goal‑reaching behavior.
Comments & Academic Discussion
Loading comments...
Leave a Comment