Exploring Millions of 6-State FSSP Solutions: the Formal Notion of Local CA Simulation
In this paper, we come back on the notion of local simulation allowing to transform a cellular automaton into a closely related one with different local encoding of information. This notion is used to explore solutions of the Firing Squad Synchronization Problem that are minimal both in time (2n – 2 for n cells) and, up to current knowledge, also in states (6 states). While only one such solution was proposed by Mazoyer since 1987, 718 new solutions have been generated by Clergue, Verel and Formenti in 2018 with a cluster of machines. We show here that, starting from existing solutions, it is possible to generate millions of such solutions using local simulations using a single common personal computer.
💡 Research Summary
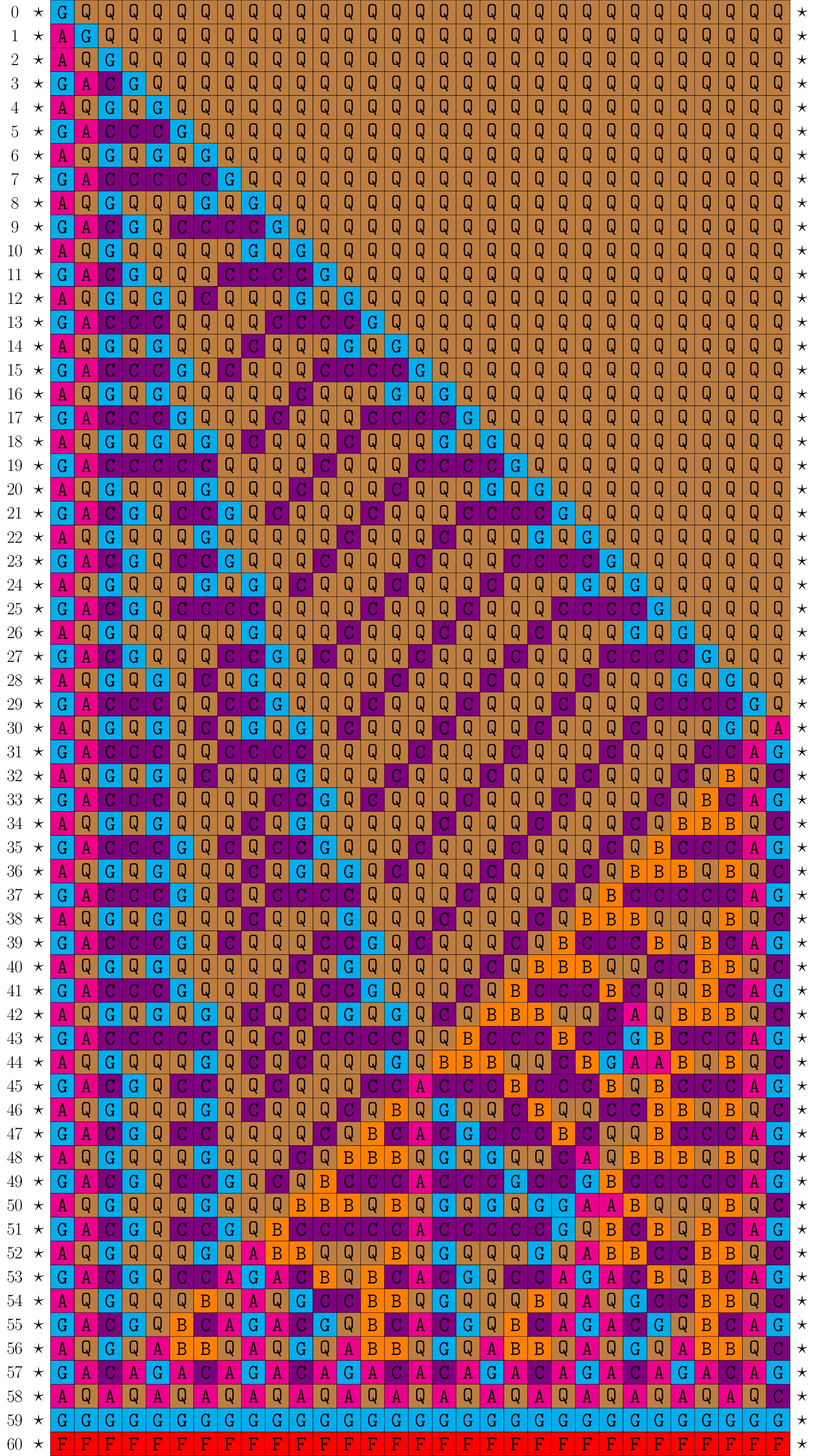
This paper presents a novel methodology for exploring the solution space of the Firing Squad Synchronization Problem (FSSP) in cellular automata (CA), specifically targeting minimal-time solutions with the smallest known number of states: six. The FSSP requires a CA to synchronize an arbitrarily long line of cells, bringing them all to a special “firing” state for the first time simultaneously at the minimal possible time of 2n-2 steps.
The study builds upon the historical context where only one 6-state minimal-time solution was known (Mazoyer, 1987) until 718 new solutions were discovered in 2018 by Clergue, Verel, and Formenti using a cluster and an Iterated Local Search algorithm. This paper demonstrates that, starting from these known solutions, it is possible to generate millions of additional 6-state FSSP solutions using a single personal computer. The key enabling technology is the formal concept of local CA simulation.
A local simulation is a transformation that maps the states of an original CA (α) to a new set of states via a local mapping (h), consisting of a function h_z for initial states and h_s for local transition outputs. This mapping is applied pointwise to the space-time diagrams of α to generate diagrams for a new CA (β). If the resulting family of diagrams is deterministic, h is a local simulation from α to β.
The paper’s major contributions are theoretical insights that make exhaustive exploration computationally feasible:
- Super Local Transition Table (Δα): Instead of generating the full space-time diagrams for each candidate mapping, the authors pre-compute a finite table (Δα) that captures all possible local patterns (e.g., triples of cells at time 0, or quintuples at time t and resulting triples at time t+1) that ever appear in α’s executions. For any local mapping h, the local transition relation of the candidate CA β can be constructed directly from Δα and h, bypassing the need to simulate β.
- FSSP-Compliance as a Sufficient Condition: A central theorem (Proposition 4) proves that if a local simulation h from a known FSSP solution α to a candidate CA β is FSSP-compliant—meaning h correctly maps the special FSSP states (General, Quiescent, Firing, Boundary) and preserves the quiescence property—then β is guaranteed to be a correct minimal-time FSSP solution itself. This eliminates the need to verify synchronization for infinitely many initial configurations.
- Exploration Algorithm: The search space is defined as the graph of all FSSP-compliant local mappings from a seed solution α to a fixed 7-state set (4 FSSP states + 3 generic states). Nodes are mappings, and edges connect mappings that differ in only one output value of h_s. The algorithm performs a systematic exploration (a “best-effort exhaustive” search) on this graph, starting from the mapping representing the original solution α. Due to the properties above, evaluating each neighbor (a new mapping h’) is extremely efficient: check FSSP-compliance and use Δα to build β’s rule, avoiding full CA simulation.
By applying this algorithm to Mazoyer’s solution and others from the set of 718, the authors successfully generated millions of distinct 6-state minimal-time FSSP solutions. This result reveals that the space of such solutions is vastly larger and more densely connected than previously understood. The local simulation graph provides a highly structured and efficient landscape for navigation.
The work bridges formal CA theory and practical algorithmic exploration, demonstrating how a theoretical concept (local simulation) can be leveraged for large-scale empirical discovery. It opens avenues for future work, such as applying the methodology to other CA minimization problems, completely classifying the 6-state FSSP solution space, and factoring out common structures to simplify correctness proofs.
Comments & Academic Discussion
Loading comments...
Leave a Comment