Reducing graph transversals via edge contractions
Authors: Paloma T. Lima, Vinicius F. dos Santos, Ignasi Sau
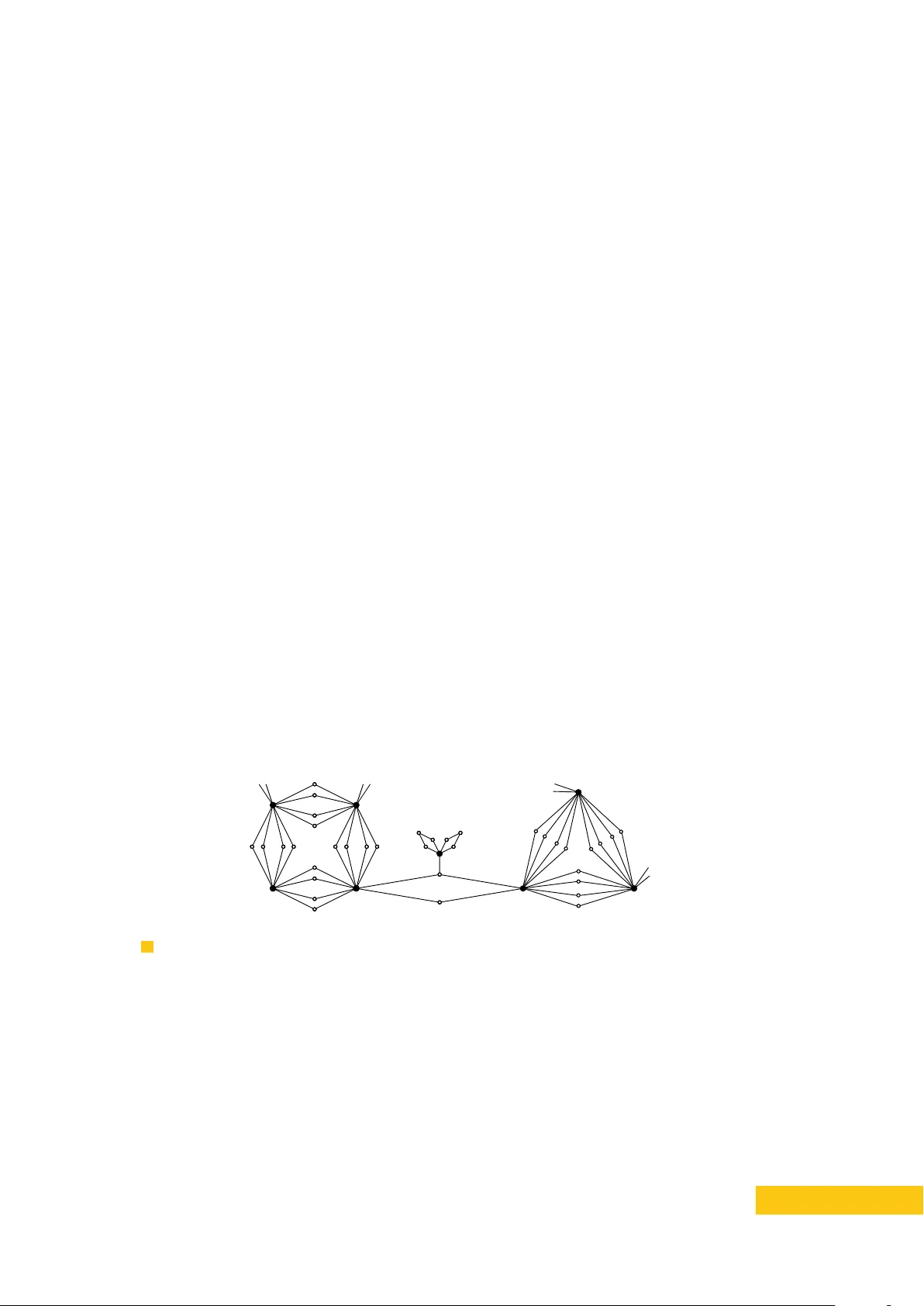
Reducing graph transversals via edge contractions P aloma T. Lima Departmen t of Informatics, Univ ersit y of Bergen, Norw ay paloma.lima@uib.no Vinicius F. dos San tos Departamen to de Ciência da Computação, Universidade F ederal de Minas Gerais, Belo Horizonte, Brazil viniciussan tos@dcc.ufmg.br Ignasi Sau LIRMM, Université de Montpellier, CNRS, Montpellier, F rance ignasi.sau@lirmm.fr Uév erton S. Souza Instituto de Computação, Univ ersidade F ederal Fluminense, Niterói, Brazil uev erton@ic.uff.br Abstract F or a graph in v ariant π , the Contraction( π ) problem consists of, giv en a graph G and t wo positive in tegers k , d , deciding whether one can contract at most k edges of G to obtain a graph in which π has dropp ed by at least d . Galb y et al. [ISAAC 2019, MFCS 2019] recently studied the case where π is the size of a minimum dominating set. W e fo cus on graph inv arian ts defined as the minimum size of a vertex set that hits all the o ccurrences of graphs in a collection H according to a fixed con tainment relation. W e prov e co-NP -hardness results under some assumptions on the graphs in H , whic h in particular imply that Contraction( π ) is co-NP -hard even for fixed k = d = 1 when π is the size of a minimum feedback vertex set or an odd cycle transv ersal. In sharp contrast, we show that when π is the size of a minimum vertex cov er, the problem is in XP parameterized by d . 2012 A CM Subject Classification Theory of computation → Design and analysis of algorithms; Theory of computation → Graph algorithms analysis; Theory of computation → P arameterized complexit y and exact algorithm Keyw ords and phrases blo c ker problem, edge contraction, graph transversal, parameterized com- plexit y , v ertex co ver, feedbac k v ertex set, o dd cycle transv ersal. Related Version A conference v ersion of this article appeared in the Pr oc e edings of the 45th International Symp osium on Mathematic al F oundations of Computer Scienc e (MFCS), volume 170 of LIPIcs, p ages 64:1–64:15, 2020 . A full version of the pap er is p ermanently av ailable at https://arxiv.org/abs/2005.01460 . F unding Vinicius F. dos Santos : Grant APQ-02592-16 Minas Gerais Research Supp ort F oundation (F APEMIG) and Grants 311679/2018-8 and 421660/2016-3 National Council for Scien tific and T echnological Developmen t (CNPq). Ignasi Sau : CAPES-PRINT Institutional Internationalization Program, process 88887.371209/ 2019-00, and pro jects DEMOGRAPH (ANR-16-CE40-0028), ESIGMA (ANR-17-CE23-0010), ELIT (ANR-20-CE48-0008-01), and UTMA (ANR-20-CE92-0027). Uéverton S. Souza : Gran t E-26/203.272/2017 Rio de Janeiro Research Supp ort F oundation (F APERJ) and Grant 303726/2017-2 National Council for Scientific and T echnological Developmen t (CNPq). 2 Reducing graph transversals via edge contractions 1 Intro duction Graph mo dification problems play a cen tral role in algorithmic graph theory and hav e b een widely studied in the last few years [ 5 , 12 , 20 ]. In this kind of problem, given a graph, we w ant to p erform a small num b er of modifications so that the resulting graph satisfies a desired prop erty . T ypically , this prop erty is describ ed as a graph class to which the resulting graph must b elong, and the corresp onding problem is usually NP -hard [ 33 , 38 , 39 ]. Numerous famous problems can b e stated as graph mo dification problems. F or instance, if the op eration is vertex deletion and the target graph class is that of forests, w e obtain the well-kno wn Feedback Ver tex Set problem. A distinct type of graph mo dification problem that has b een considered more recently is concerned with graph inv arian ts 1 , instead of graph classes. The goal here is to p erform a small num b er of mo difications in order to decrease (or increase) a giv en inv arian t of the input graph. These are the so-called blo cker pr oblems , the main ob ject of study in this work. More precisely , in a blo ck er problem with inv ariant π , given a graph G and a set M of graph mo dification operations, the question is whether G can b e modified in to a graph G 0 suc h that π ( G 0 ) ≤ π ( G ) − d , for some thr eshold d , via at most k op erations from M . The name blo c ker comes from the fact that the set of vertices or edges inv olv ed in the mo difications can b e viewed as “blo cking” the inv ariant π , that is, preven ting π from b eing smaller, as we w ould like in a minimization problem. Identifying parts of the graph that are resp onsible for an increase in a graph in v ariant gives useful information ab out the graph structure and has b een the central question around many graph problems. F or instance, if the inv arian t in question is the size of a longest path, d = 1 and the op eration is v ertex deletion, the problem b ecomes equiv alent to testing whether there exists a set of k v ertices that intersects ev ery longest path of the input graph [ 7 – 9 , 36 ]. Another example is that of computing the Hadwiger num ber of a graph. The Hadwiger Number problem takes as input a graph G and an integer t , and asks whether there exists a set of edges in G the contraction of which results in a graph isomorphic to the complete graph on t v ertices [ 6 , 19 , 25 ]. This problem can b e formulated as a blo ck er problem with the edge contraction op eration, the inv ariant b eing the indep endence num b er (denoted b y α ), k = | V ( G ) | − t , and d = α ( G ) − 1 . Because of their relev ance and connection to other well-studied graph problems, blo ck er problems hav e been in vestigated for n umerous graph inv ariants, such as the chromatic n umber, the indep endence num b er, the matching n um b er, the diameter, the domination num b er, the total domination num b er, and the clique n umber of a graph [ 2 – 4 , 10 , 16 , 22 , 23 , 31 , 34 , 35 , 38 ]. The set M has so far b een restricted to contain a single op eration, usually vertex deletion, edge deletion, edge addition, or edge contraction. In this work, we restrict ourselves to the edge contraction op eration. F ormally , we are interested in the following problem, where π is an y graph inv arian t. Input: A graph G and tw o positive integers k , d . Question: Can G b e k -con tracted in to a graph G 0 suc h that π ( G 0 ) ≤ π ( G ) − d ? Contraction( π ) When k and d are fixed instead of b eing part of the input, w e denote the corresp onding problem by k -Contraction( π , d ) . Block er problems with the edge contraction op eration 1 W e use “inv ariant” instead of parameter in order to av oid confusion with the parameter of the corres- ponding parameterized problem. P . T. Lima, V. F. dos Santos, I. Sau and U. S. Souza 3 ha ve already been studied with resp ect to the c hromatic n umber, clique num b er, and indep endence num ber [ 16 , 35 ], and the domination n umber [ 21 ], denoted by χ , ω , α , and γ , resp ectiv ely . These w orks address the problem from the p oint of view of graph classes. Diner et al. [ 16 ] show ed, among other results, that Contraction( π ) is NP -complete restricted to split graphs for π ∈ { χ, α, ω } , but it is p olynomial-time solv able in this graph class for fixed d in all three cases. Galb y et al. [ 21 ] recen tly initiated the study of the problem for π = γ for the case d = 1 , providing several negative and p ositive results restricted to particular graph classes, such as a p olynomial-time algorithm for k -Contraction ( γ , 1) on ( P 5 + pK 1 ) -free graphs, for any p ≥ 1 . Galb y et al. [ 21 ] also considered a v ariant of the blo c ker problem in whic h an edge is given as p art of the input . Namely , they show ed that the problem of deciding whether the contraction of this sp ecific edge decreases the domination n umber of a graph admits no p olynomial-time algorithm unless P = NP . W e observe here that their pro of [ 21 , Theorem 3.13] in fact works for an y graph in v arian t satisfying tw o sp ecific conditions, as stated in the following prop osition. I Prop osition 1 (Galby et al. [ 21 ]) . L et π b e a gr aph invariant such that (i) it is NP -har d to c ompute the π -numb er of a gr aph and (ii) c ontr acting an e dge r e duc es π by at most one. Then, ther e exists no p olynomial-time algorithm de ciding whether c ontr acting one given e dge de cr e ases the π -numb er of a gr aph, unless P = NP . In this work, the inv ariants we fo cus on are H -tr ansversals , that is, the minim um size of a vertex set of a graph that hits all the o ccurrences of graphs in a fixed (finite or infinite) collection H according to a sp ecified con tainment relation ≺ . W e denote this inv arian t b y τ ≺ H . Note that distinct instan tiations of H and ≺ capture, for instance, the vertex cov er, feedback v ertex set, and o dd cycle transversal n umbers, and that these three inv arian ts satisfy the conditions of Prop osition 1 . Our results and tec hniques . W e show (Theorem 4 ) that 1 -Contraction( τ ≺ H , 1 ) is co- NP -hard when H is a family of 2-connected graphs con taining at least one non-complete graph and ≺ is any of the subgraph, induced subgraph, minor, or top ological minor con tainment relations. This implies that it is co-NP -hard to test whether we can reduce the feedbac k v ertex set num b er or the o dd cycle transversal n umber of a graph b y p erforming one edge con traction. Note that this result is not implied b y Prop osition 1 , since we do not sp ecify whic h edge should b e contracted. W e also show (Theorem 9 ) that the problem is co-NP -hard if H is a family of cliques of size at least three and ≺ is the minor or top ological minor con tainment relation. The same holds (Theorem 10 ) if H is a family of graphs con taining a path on at least four v ertices and any collection of 2-connected graphs and ≺ is the subgraph, induced subgraph, minor, or top ological minor containmen t relation. All these reductions are from the 3- Sa t problem restricted to clean form ulas (see Section 2 for the definition). W e point out that, as can b e seen b y earlier results and the ones men tioned ab ov e, blo c ker problems are generally very hard, and b ecome p olynomial-time solv able only when restricted to sp ecific graph classes. Ho wev er, w e show that the picture c hanges completely when the inv ariant in question is the v ertex cov er num b er of a graph (denoted by vc ): we pro ve (Theorem 15 ) that Contraction( vc ) can b e solved in XP time parameterized by d on general graphs , hence in p olynomial time for fixed d , in particular for d = 1 . This result should b e compared to Prop osition 1 , which shows that the problem is hard for d = 1 if the edge to b e contracted is prescrib ed . Note that since the con traction of an edge may drop the minimum v ertex cov er of a graph by at most one, w e may assume that k ≥ d (as 4 Reducing graph transversals via edge contractions otherwise the answer is trivially ‘ No ’), hence parameter d is stronger than k . Our algorithm (cf. Algorithm 1 ) starts by c hec king whether the bip artite c ontr action numb er of G (i.e., the minim um num b er of edges to b e contracted in order to obtain a bipartite graph), denoted b y b c ( G ) , is at most d − 1 . This can be done in FPT time b y a result of Heggernes et al. [ 28 ], later improv ed by Guillemot and Marx [ 26 ]. If b c ( G ) ≥ d , a simple argument allo ws to conclude that w e are dealing with a Yes -instance. Otherwise, we distinguish tw o cases dep ending on whether G con tains a connected comp onent C with vc ( C ) > d or not. If it is not the case, we show (Lemma 13 ) that the problem can b e solv ed in FPT time by combining a formulation in MSO 2 logic and a dynamic programming algorithm. Otherwise, w e prov e that we may assume (Lemma 12 ) that k < 2 d , which enables us to enumerate all subsets F ⊆ E ( G ) of size at most k and, for each of them, solve the problem in FPT time b y a branc hing algorithm, exploiting the fact that vc can b e computed in p olynomial time on bipartite graphs. Finally , we also show that a small modification of the abov e algorithm yields (Corollary 16 ) that the problem of determining the minim um n umber of edges to b e contracted to drop the v ertex cov er num b er of a graph by d can b e 2-approximated in FPT -time parameterized by d . Organization . In Section 2 we pro vide some preliminaries and formally define all the problems mentioned throughout the text. In Section 3 we pro ve the co-NP -hardness results, and in Section 4 w e present the algorithms for reducing the size of a minimum v ertex cov er via edge contractions. W e conclude the article in Section 5 with some further observ ations and directions for further researc h. 2 Prelimina ries Graph notation. W e use standard graph-theoretic notation, and w e refer the reader to [ 15 ] for an y undefined notation. W e will only consider undirected graphs without lo ops nor m ultiple edges, and w e denote an edge b etw een tw o vertices u and v b y { u, v } . A subgraph H of a graph G is induc e d if H can b e obtained from G b y deleting vertices. A graph G is H -fr e e if it do es not contain an y induced subgraph isomorphic to H . F or a graph G and a set S ⊆ V ( G ) , we use the notation G \ S := G [ V ( G ) \ S ] . F or a set F ⊆ E ( G ) , we denote by V ( F ) the set of vertices inciden t to some edge in F . W e denote by ∆( G ) (resp. ω ( G ) ) the maxim um vertex degree (resp. clique size) of a graph G . F or an integer h ≥ 1 , we denote b y P h (resp. C h , K h ) the path (resp. cycle, clique) on h v ertices. A star is a tree with at least one edge in which one vertex is adjacent to all other vertices. A v ertex set S of a connected graph G is a sep ar ator if G \ S is disconnected. F or an integer k ≥ 1 , a graph G is k -c onne cte d if it is connected and do es not hav e any separator of size at most k − 1 . F or an in teger k ≥ 1 , we denote by [ k ] the set of all in tegers i such that 1 ≤ i ≤ k . The op en (resp. close d ) neighb orho o d of a vertex v in a graph G is denoted by N G ( v ) (resp. N G [ v ] ). W e may drop the subscript if the graph G is clear from the context. The c ontr action of an edge e = { u, v } in a graph G results in a graph G 0 obtained from G b y remo ving u and v , and adding a new vertex v e with N G 0 ( v e ) = N G ( u ) ∪ N G ( v ) . W e denote b y G/e the graph obtained from G b y contracting an edge e , and if F ⊆ E ( G ) , we denote by G/F the graph obtained from G b y contracting all the edges in F , in an y order; it is easy to v erify that the resulting graph do es not dep end on the order in whic h the con tractions are applied. If | F | = k , we say that G is k -c ontr acte d into G/F . A vertex c over (resp. fe e db ack vertex set , o dd cycle tr ansversal ) of a graph G is a set S ⊆ V ( G ) such that G \ S is edgeless (resp. acyclic, bipartite). W e denote the minimum size of a vertex co ver (resp. feedback vertex set, o dd cycle transversal) of a graph G b y vc ( G ) P . T. Lima, V. F. dos Santos, I. Sau and U. S. Souza 5 (resp. fvs ( G ) , o ct ( G ) ). Note that, if G is connected, vc ( G ) = 1 if and only if G is a star. A graph H is a minor of a graph G if it can b e obtained from G b y removing v ertices, deleting edges, and contracting edges. A graph H is a top olo gic al minor of a graph G if it can b e obtained from G b y removing v ertices, deleting edges, and contracting edges having at least one vertex of degree at most tw o. The op eration of sub dividing an edge { u, v } consists in deleting the edge { u, v } and adding a new vertex w adjacent to u and v . Graph transversals. F or a fixed graph containmen t relation ≺ and a fixed (finite or infinite) collection of graphs H , we define the inv ariant τ ≺ H suc h that, for every graph G , τ ≺ H ( G ) is equal to the minimum size of a set S ⊆ V ( G ) such that G \ S do es not contain an y of the graphs in H according to containmen t relation ≺ . If H = { H } , we denote τ ≺ { H } b y τ ≺ H . Such a set S is called an H -transversal or an H -hitting set. F or instance, if ≺ is the minor relation and H is an edge (resp. a triangle), then τ ≺ H is the size of a minimum vertex co ver (resp. feedback v ertex set), which w e abbreviate as vc (resp. fvs ). On the other hand, if ≺ is the subgraph relation and H con tains all o dd cycles, then τ ≺ H is the size of a minimum o dd cycle transv ersal, which we abbreviate as o ct . Definition of the problems. F or a graph inv arian t π , we also consider the versions of the Contraction( π ) problem, defined in the In troduction, where one or b oth positive integers k and d are fixed , instead of b eing part of the input. Namely , w e denote b y k -Contraction( π ) , Contraction( π , d ) , and k -Contraction( π , d ) the version of Contraction( π ) in which k , d , and b oth k and d are fixed, resp ectiv ely . Finally , we define the following optimization version of Contraction( π ) . Input: A graph G and a p ositive integer d . Output: The minim um in teger k suc h that G b e k -con tracted into a graph G 0 suc h that π ( G 0 ) ≤ π ( G ) − d . Min-Contraction( π ) P arameterized complexity . W e refer the reader to [ 13 , 17 ] for basic background on parameterized complexity , and we recall here only some basic definitions. A p ar ameterize d pr oblem is a decision problem whose instances are pairs ( x, k ) ∈ Σ ∗ × N , where k is called the p ar ameter . A parameterized problem is fixe d-p ar ameter tr actable ( FPT ) if there exists an algorithm A , a computable function f , and a constant c suc h that giv en an instance I = ( x, k ) , A (called an FPT algorithm ) correctly decides whether I ∈ L in time b ounded by f ( k ) · | I | c . A parameterized problem is slic e-wise p olynomial ( XP ) if there exists an algorithm A and tw o computable functions f , g suc h that given an instance I = ( x, k ) , A (called an XP algorithm ) correctly decides whether I ∈ L in time b ounded b y f ( k ) · | I | g ( k ) . Within parameterized problems, the class W [1] may b e seen as the parameterized equi- v alent to the class NP of classical optimization problems. Without entering into details (see [ 13 , 17 ] for the formal definitions), a parameterized problem b eing W [1]- har d can b e seen as a strong evidence that this problem is not FPT . The canonical example of W [1]-hard problem is Independent Set parameterized by the size of the solution. T o transfer W [1] - hardness from one problem to another, one uses a p ar ameterize d r e duction , which given an input I = ( x, k ) of the source problem, computes in time f ( k ) · | I | c , for some computable function f and a constant c , an equiv alent instance I 0 = ( x 0 , k 0 ) of the target problem, suc h that k 0 is b ounded by a function dep ending only on k . An equiv alen t definition of W [1]-hard problem is any problem that admits a parameterized reduction from Independent Set parameterized by the size of the solution. 6 Reducing graph transversals via edge contractions T reewidth and Courcelle’s Theorem. F or an integer k ≥ 1 , a k -tr e e is a graph that b e obtained from a k -clique by recursively adding vertices adjacen t to a k -clique of the current graph. The tr e ewidth of a graph G , denoted by t w ( G ) , is the smallest integer k suc h that G is a subgraph of a k -tree. The syn tax of monadic se c ond or der ( MSO 2 ) logic of graphs includes the logical connectives ∨ , ∧ , ¬ , v ariables for vertices, edges, sets of v ertices and sets of edges, the quantifiers ∀ , ∃ that can b e applied to these v ariables, and the binary relations expressing whether a v ertex or an edge b elong to a set, whether an edge is incident to vertex, whether tw o vertices are adjacent, and whether tw o sets are equal. The follo wing result of Courcelle [ 11 ], as w ell as one of its sev eral optimization v ariants [ 1 ], is one of the most widely used results in the area of parameterized complexity . I Prop osition 2 (Courcelle [ 11 ], Arnb org et al. [ 1 ]) . Che cking whether an MSO 2 formula ϕ holds on an n -vertex gr aph of tr e ewidth at most t w c an b e done in time f ( ϕ, tw ) · n , for a c omputable function f . Mor e over, within the same running time, one c an find a vertex or e dge set of G of maximum or minimum size that satisfies ϕ . Exp onen tial Time Hyp othesis and clean 3- Sa t . The Exp onential Time Hyp othesis ( ETH ) of Impagliazzo and Paturi [ 29 ] implies that the 3- Sa t problem on n v ariables cannot b e solved in time 2 o ( n ) . The Sparsification Lemma of Impagliazzo et al. [ 30 ] implies that if the ETH holds, then there is no algorithm solving a 3- Sa t formula with n v ariables and m clauses in time 2 o ( n + m ) . Using the terminology from Cygan et al. [ 14 ], a 3- Sa t formula ϕ , in conjunctiv e normal form, is said to b e cle an if eac h v ariable of ϕ app ears exactly three times, at least once p ositively and at least once negatively , and each clause of ϕ con tains t wo or three literals and do es not contain t wice the same v ariable. Cygan et al. [ 14 ] observed the follo wing useful lemma. I Lemma 3 (Cygan et al. [ 14 ]) . The pr oblem of de ciding whether a cle an 3- Sa t formula with n variables is satisfiable is NP -har d, and the existenc e of an algorithm in time 2 o ( n ) to solve it would violate the ETH . 3 Ha rdness results W e start with some definitions that will b e used in the reductions of this section. Let G and H b e tw o graphs, let u, v ∈ V ( H ) , and let { x, y } ∈ E ( G ) . By r eplacing { x, y } by H u,v w e mean deleting edge { x, y } from G , adding a cop y of H and identifying vertices u and v of H with vertices x and y of G , resp ectively . The op eration of r eplacing { x, y } by two c opies of H u,v is defined similarly , except that we add tw o copies of H and w e identify vertices u and v of b oth copies of H with vertices x and y of G , resp ectively . By attaching H u to x ∈ V ( G ) we mean adding a cop y of H and identifying vertex u of H with vertex x of G , and b y attaching a p endent H u to x ∈ V ( G ) we mean adding a copy of H and an edge b etw een v ertex u of H and v ertex x of G . W e denote by H 2 u the graph obtained from tw o copies of H b y identifying vertex u in each of the copies. I Theo rem 4. L et H b e a c ol le ction of 2-conne cte d gr aphs c ontaining at le ast one non- c omplete gr aph. Then 1 -Contraction( τ ≺ H , 1 ) is co-NP -har d, for ≺ b eing any of the sub gr aph, induc e d sub gr aph, minor, or top olo gic al minor c ontainment r elations. Mor e over, the pr oblem c annot b e solve d in sub exp onential time assuming the ETH , even r estricte d to gr aphs with maximum de gr e e dep ending on H . Pro of. W e present a reduction from the 3- Sa t problem restricted to clean formulas, which is NP -hard by Lemma 3 . Namely , given a clean formula ϕ with n v ariables and m clauses, P . T. Lima, V. F. dos Santos, I. Sau and U. S. Souza 7 w e will construct in p olynomial time an instance G H ϕ suc h that ϕ is satisfiable if and only if G H ϕ is a No -instance of 1 -Contraction( τ ≺ H , 1 ) . W e start b y constructing a graph G ϕ that will b e reused in the other reductions of this section, a nd which is inspired by the classical NP -hardness reduction [ 24 ] from 3- Sa t to Ver tex Cover . F or each v ariable x of ϕ and for eac h clause C con taining x in a literal ` ∈ { x, ¯ x } , we add to G ϕ a new vertex a x,C,` . W e also introduce another “dumm y” v ertex a x . Since ϕ is clean, w e hav e in tro duced four vertices in G ϕ for eac h v ariable x . Let a x,C 1 ,` , a x,C 2 , ¯ ` , a x,C 3 ,` , a x b e the four introduced vertices (recall that x app ears at least once p ositively and negatively in ϕ ). W e add the following four edges, inducing a C 4 : ( a x,C 1 ,` , a x,C 2 , ¯ ` ) , ( a x,C 2 , ¯ ` , a x,C 3 ,` ) , ( a x,C 3 ,` , a x ) , and ( a x , a x,C 1 ,` ) . W e denote by A the union of all the vertices in these v ariable gadgets. F or eac h clause C of ϕ and for each literal ` in C , we add to G ϕ a new vertex b C,` . Since ϕ is clean, we hav e introduced tw o or three vertices in G ϕ for each clause C . W e add an edge b etw een every pair of these v ertices, hence inducing a clique of size t wo or three. W e denote by B the union of all the vertices in these clause gadgets. Finally , for each v ariable x of ϕ and for eac h clause C con taining x in a literal ` ∈ { x, ¯ x } , w e add to G ϕ an edge b etw een a x,C,` ∈ A and b C,` ∈ B . This concludes the construction of G ϕ , which w e pro ceed to mo dify . Note that V ( G ϕ ) = A ∪ B . Let H ∈ H b e a non-complete 2-connected graph, and let u, v b e tw o non-adjacent v ertices in H . Starting from G ϕ , we replace each of the edges b etw een tw o vertices in A or t wo vertices in B b y tw o copies of H u,v , and eac h edge b etw een a vertex in A and a v ertex in B b y one copy of H u,v . Eac h of these copies of H is called an A -c opy , B -c opy , or AB -c opy , dep ending on whether its attachmen t vertices are b oth in A , b oth in B , or one in A and one in B , resp ectiv ely . Finally , for each AB -cop y of H , we c ho ose arbitrarily within it a vertex z distinct from u and v , and w e attac h a p endent copy of H 2 u to z . These newly added copies of H are called p endent c opies , the edge linking them to its corresp onding AB -cop y of H is called the p endent e dge of that AB -cop y of H , and the vertex in the AB -cop y incident with the p enden t edge is called the b ase vertex of that AB -cop y of H . This concludes the construction of G H ϕ ; see Figure 1 for an example for H containing all cycles and H = C 4 . a x,C 1 ,` a x,C 2 , ¯ ` a x,C 3 ,` a x b C 1 ,` 2 b C 1 ,` 1 b C 1 ,` 3 AB -copy z s Figure 1 Illustration of the graph G H ϕ for H con taining all cycles and H = C 4 . Black (resp. white) vertices are attac hment (resp. internal) v ertices of the corresponding copies of H . V ertex z is the base vertex and { z , s } is the p endent edge of the depicted AB -copy of H . W e can clearly assume that H is an an tic hain with resp ect to ≺ , that is, that its elements are pairwise incomparable with resp ect to ≺ . Assume for the sake of presentation that ≺ is the subgraph relation, and we omit it from the notation τ ≺ H ; at the end of the pro of we will argue that the same arguments apply as well to the other containmen t relations listed in the statemen t of the theorem. Note that G H ϕ con tains 2 n pairwise vertex-disjoin t A -copies of H and 3 n pairwise vertex-disjoin t p endent copies of H , taking into accoun t that each v ariable 8 Reducing graph transversals via edge contractions app ears exactly three times in ϕ . On the other hand, since for clause C of ϕ the vertices { b C,` | ` ∈ C } ⊆ B induce a clique in G ϕ , for each clause C of ϕ at least | C | − 1 vertices of G H ϕ are needed to hit the B -copies of H among the vertices { b C,` | ` ∈ C } ⊆ B , where | C | denotes the n umber of literals in C . Therefore, using ϕ that is clean, it follows that τ H ( G H ϕ ) ≥ 2 n + 3 n + X C ∈ ϕ ( | C | − 1) = 8 n − m. (1) W e present three claims that, together, will conclude the pro of of the theorem. B Claim 5. τ H ( G H ϕ ) = 8 n − m if and only if ϕ is satisfiable. Pro of. Supp ose first that ϕ is satisfiable, and let α b e an assignment of the v ariables that satisfies all the clauses in ϕ . W e define a set X ⊆ V ( G H ϕ ) as follows. F or each v ariable x , add to X all v ertices a x,C,` suc h that α ( ` ) is true . If only one vertex was added in the previous step, add to X v ertex a x as well. F or eac h clause C , choose a literal ` that satisfies C , and add to X the set { b C,` 0 | ` 0 6 = ` } . Finally , for each p endent copy of H , add to X its corresp onding vertex u . By construction we hav e that | X | = 8 n − m , hence by Equation ( 1 ) w e just hav e to verify that G H ϕ \ X do es not con tain any of the graphs in H as a subgraph. Note that by the choice of X , it contains at least one vertex of each A -cop y , B -cop y , and p enden t cop y of H , and since α is a satisfying assignmen t, X con tains at least one v ertex of eac h AB -cop y of H as well. Let F b e a connected comp onen t of G H ϕ \ X . Since b y hypothesis all the graphs in H are 2 -connected, it suffices to verify that no 2 -connected comp onent F 0 of F con tains one of the graphs in H as a subgraph. By the construction of G H ϕ , the c hoice of X , and the fact that X hits all copies of H in G H ϕ , it follows that such a 2 -connected comp onen t F 0 is a prop er subgraph of H . Since H is an antic hain, F 0 cannot contain any of the graphs in H as a subgraph, and we are done. Con versely , supp ose that there exists X ⊆ V ( G H ϕ ) with | X | ≤ 8 n − m suc h that G H ϕ \ X do es not contain any of the graphs in H , in particular H , as a subgraph. By Equation ( 1 ), w e ha ve that | X | = 8 n − m . By construction of G H ϕ and the fact that | X | = 8 n − m (see the paragraph ab o ve Equation ( 1 )), it follows that X m ust contain exactly one of the pairs { a x,C 1 ,` , a x,C 3 ,` } and { a x , a x,C 2 , ¯ ` } for each v ariable x , and exactly | C | − 1 vertices in { b C,` | ` ∈ C } for each clause C . W e define the following assignment α of the v ariables: for eac h v ariable x , let ` ∈ { x, ¯ x } suc h that a x,C,` ∈ X for some clause C . Then we set α ( x ) to true if ` = x , and to false if ` = ¯ x . By the ab ov e discussion, this is a v alid assignment. Consider a clause C of ϕ , and let ` b e the literal in C suc h that b C,` / ∈ X . Since G H ϕ \ X do es not contain H as a subgraph, there must exist a v ariable x ∈ { `, ¯ ` } suc h that a x,C,` ∈ X , as otherwise the AB -cop y of H b et ween b C,` and a x,C,` w ould b e an o ccurrence of H in G H ϕ \ X . By the definition of α , necessarily α ( ` ) is true , and therefore α satisfies C . Since this argument holds for ev ery clause, we conclude that ϕ is satisfiable. J B Claim 6. If τ H ( G H ϕ ) = 8 n − m , then there is no edge e such that τ H ( G H ϕ /e ) < τ H ( G H ϕ ) . Pro of. Let e ∈ E ( G H ϕ ) b e an arbitrary edge, and consider the graph G H ϕ /e . Since in G H ϕ there are t wo copies of H b et ween every pair of vertices in A and B within the same v ariable or clause gadget, resp ectively , tw o copies of H are attached to u in every p enden t H 2 u , and u and v are not adjacent in H , it follows that, for each such a pair of copies of H , at least one of them still survives in G H ϕ /e . Therefore, G H ϕ /e still contains 2 n pairwise vertex-disjoin t A -copies of H , 3 n pairwise v ertex-disjoint pendent copies of H , and, for each clause C of ϕ , at least | C | − 1 vertices of P . T. Lima, V. F. dos Santos, I. Sau and U. S. Souza 9 G H ϕ /e are needed to hit the B -copies of H among the v ertices { b C,` | ` ∈ C } ⊆ B . Thus, as b y hypothesis τ H ( G H ϕ ) = 8 n − m , we ha v e that τ H ( G H ϕ /e ) ≥ 2 n + 3 n + X C ∈ ϕ ( | C | − 1) = 8 n − m = τ H ( G H ϕ ) , and the claim follows. J B Claim 7. If τ H ( G H ϕ ) > 8 n − m , then there is an edge e such that τ H ( G H ϕ /e ) < τ H ( G H ϕ ) . Pro of. Let X ⊆ V ( G H ϕ ) b e an H -hitting set of minimum size. W e call a vertex in a copy of H in G H ϕ internal if it is distinct from its attachmen t vertices (cf. Figure 1 ). W e pro ceed to construct another H -hitting set X 0 ⊆ V ( G H ϕ ) with canonical prop erties, suc h that 1. | X 0 | ≤ | X | , 2. X 0 con tains exactly either { a x,C 1 ,` , a x,C 3 ,` } or { a x , a x,C 2 , ¯ ` } for eac h v ariable x , 3. X 0 con tains exactly | C | − 1 vertices in the set { b C,` | ` ∈ C } for each clause C , 4. X 0 con tains exactly one vertex in each pair of p endent copies of H , 5. X 0 con tains no internal v ertex of an A -copy , B -copy , or p endent cop y of H , and 6. all internal v ertices of AB -copies of H that are in X 0 are base v ertices. Note that Prop ert y 1 ab ov e implies that | X 0 | = | X | = τ H ( G H ϕ ) > 8 n − m . W e construct the set X 0 via the follo wing pro cedure: 1. Start with X 0 = X . 2. F or each A -cop y , B -cop y , or p enden t copy ˜ H of H in G H ϕ suc h that X 0 con tains at least one in ternal vertex in ˜ H , remov e from X 0 all in ternal vertices of ˜ H , and add to X 0 an y of the attachmen t vertices of ˜ H , whic h may already b e in X 0 . 3. F or each v ariable x , let X 0 x = X 0 ∩ { a x,C 1 ,` , a x,C 2 , ¯ ` , a x,C 3 ,` , a x } . If | X 0 x | ≥ 3 , let P b e one of the pairs { a x,C 1 ,` , a x,C 3 ,` } and { a x , a x,C 2 , ¯ ` } suc h that P ⊆ X 0 . Remov e X 0 x \ P from X 0 and, for ev ery v ertex v ∈ X 0 x \ P with v 6 = a x , add to X 0 an arbitrarily chosen internal v ertex in the AB -copy of H containing v , whic h may already b e in X 0 . 4. F or eac h clause C , let X 0 C = X 0 ∩ { b C,` | ` ∈ C } . Note that by construction of G H ϕ and Step 2 ab o ve, | X 0 C | ≥ | C | − 1 . If | X 0 C | = | C | , remov e from X 0 an arbitrarily c hosen vertex v ∈ { b C,` | ` ∈ C } , and add to X 0 an arbitrarily chosen internal vertex in the AB -cop y of H con taining v , which may already b e in X 0 . 5. F or each AB -cop y ˜ H of H in G H ϕ suc h that X 0 con tains at least one in ternal vertex in ˜ H , remo ve from X 0 all internal vertices of ˜ H , and add to X 0 the base vertex of ˜ H , whic h ma y already b e in X 0 . Let X 0 b e the set obtained at the end of the ab ov e pro cedure. It can b e easily verified that X 0 satisfies the desired Prop erties 1 - 6 . In order to see that X 0 is a H -hitting set, note that, b y construction of G H ϕ , each vertex in A ∪ B is contained in at most one AB -cop y of H . Th us, in Steps 3 and 4 of the ab o ve pro cedure, when we sw ap vertices in A ∪ B b y in ternal v ertices in AB -copies of H , we guarantee that the currently constructed set X 0 is still a H -hitting set. Clearly , this prop erty is also preserved in Steps 2 and 5 . W e no w pro ceed, using the constructed H -hitting set X 0 , to iden tify an edge e ? ∈ E ( G H ϕ ) suc h that τ H ( G H ϕ /e ? ) < | X 0 | = τ H ( G H ϕ ) , concluding the proof of the claim. Since by h yp othesis | X 0 | = τ H ( G H ϕ ) ≥ 8 n − m + 1 , Prop erties 1 - 6 of X 0 imply that X 0 con tains at least one base vertex z in an AB -cop y ˜ H of H . Let s b e the v ertex in the p enden t copies of H suc h that { z , s } ∈ E ( G H ϕ ) ; hence { z , s } is the p endent edge of ˜ H (cf. Figure 1 ). By 10 Reducing graph transversals via edge contractions Prop ert y 5 of X 0 , it follo ws that z ∈ X 0 . Let e ? = { z , s } , and let w b e the v ertex in G H ϕ /e ? resulting from the contraction of e ? . Since b oth z , s ∈ X 0 , it can b e easily v erified that the set X ? := ( X 0 \ { z , s } ) ∪ { w } is a H -hitting set of G H ϕ /e ? with | X ? | = | X 0 | − 1 . Therefore, τ H ( G H ϕ /e ? ) ≤ | X ? | < | X 0 | = τ H ( G H ϕ ) , and the claim follows. J Claims 5 , 6 , and 7 together imply that ϕ is satisfiable if and only if G H ϕ is a No -instance of 1 -Contraction( τ ≺ H , 1 ) for the subgraph relation, as we w anted to prov e. Let us now argue that the same pro of applies when ≺ is another of the graph containmen t relations stated in the theorem. Indeed, by construction of G H ϕ , the h yp othesis that all the graphs in H are 2 -connected, and the fact that H is an an tichain, it follows that if X is an H -hitting set for some of these containmen t relations, none of the graphs in H o ccurs in G H ϕ \ X nor in ( G H ϕ /e ) \ X for an y edge e , for any of the subgraph, induced subgraph, minor, or top ological minor containmen t relations. Finally , the latter statemen t in the theorem follows easily from Lemma 3 and b y observing that, since the construction of G H ϕ dep ends on a fixed graph H ∈ H , it follo ws that | V ( G H ϕ ) | = O ( n ) and ∆( G H ϕ ) ≤ 5 · ∆( H ) . J F rom Theorem 4 we immediately get the following corollary . I Corolla ry 8. 1 -Contraction( π , 1 ) is co-NP -har d if π = fvs or π = o ct . Pro of. F or π = fvs (resp. π = o ct ), we apply Theorem 4 for H b eing the collection of all cycles (resp. o dd cycles) and ≺ b eing the subgraph relation. J Note that we can also obtain hardness results assuming that the input graph of the considered problem is planar (and some graph in H as well), b y reducing from planar v ersions of 3- Sa t . More interesting is the fact the pro of of Theorem 4 do es not work if either all the graphs in H are cliques, or if H con tains some graph that is not 2 -connected. Indeed, in the pro of of Claim 6 w e crucially used the fact that the vertices u, v ∈ V ( H ) are not adjacen t, so that the contraction of an y edge e still leav es intact one of each pair of copies of H in G H ϕ /e . On the other hand, if H con tains a graph H 0 that is not 2 -connected, Claim 5 do es not hold an ymore: such a graph H 0 ma y o ccur in the graph G H ϕ \ X considered in the first part of the pro of, hence X ma y not b e an H -hitting set of G H ϕ an ymore. W e now present tw o hardness results for families H in whic h we drop one of the tw o assumptions discussed ab o ve, namely complete graphs and families containing paths. In the next theorem we pro ve, using a simple trick, co-NP -hardness when H consists of complete graphs, for the minor and top ological minor containmen t relations. Note that w e ma y assume that the complete graphs hav e at least three vertices, as otherwise the problem can b e solv ed in p olynomial time by Theorem 15 . I Theorem 9. L et H b e a c ol le ction of cliques, e ach having at le ast thr e e vertic es. Then 1 - Contraction( τ ≺ H , 1 ) is co-NP -har d, for ≺ b eing the minor or top olo gic al minor c ontainment r elations. Pro of. Let H • = { H • | H ∈ H} , where H • is the graph obtained from H b y sub dividing eac h edge once. (If H is the minor relation, w e may assume that H con tains only one clique.) Since all the graphs in H are cliques on at least three vertices, H • is a collection P . T. Lima, V. F. dos Santos, I. Sau and U. S. Souza 11 of 2 -connected graphs none of whic h is a clique, hence Theorem 4 can be applied to it. Giv en a clean 3- Sa t formula ϕ , let G H • ϕ b e the graph constructed in the pro of of Theorem 4 for the family H • . Claims 5 , 6 , and 7 together imply that ϕ is satisfiable if and only if G H • ϕ is a No -instance of 1 -Contraction( τ ≺ H • , 1 ) for the subgraph relation. The imp ortant observ ation is that, b y construction, in b oth G H • ϕ and G H • ϕ /e for any edge e , the gadgets that w e attac h to a pair of vertices, as w ell as their prop er subgraphs once we delete a H • -hitting set, contain a graph in H • as a subgraph if and only if they contain one of the cliques in H as a minor or as a top ological minor, and the same pro of yields the claimed result. J Note that the pro of of Theorem 9 do es not work for the subgraph or induced subgraph con tainment relations: in that case, the constructed graph G H • ϕ do es not contain an y clique of size at least three. In our next theorem we change appropriately the construction of the graph G H ϕ defined in the pro of of Theorem 4 to obtain a hardness result when H consists of a path on at least four vertices and any collection of 2 -connected graphs, for any of the containmen t relations discussed ab ov e. I Theorem 10. L et H = P i with i ≥ 4 , and let H c ontain H and any c ol le ction of 2 - c onne cte d gr aphs. Then 1 -Contraction( τ ≺ H , 1 ) is co-NP -har d, for ≺ b eing any of the sub gr aph, induc e d sub gr aph, minor, or top olo gic al minor c ontainment r elations. Pro of. W e presen t again a reduction from the 3- Sa t problem restricted to clean formulas, similar in spirit to that of Theorem 4 . Given a clean form ula ϕ with n v ariables and m clauses, we will construct in p olynomial time an instance G H ϕ suc h that ϕ is satisfiable if and only if G H ϕ is a No -instance of 1 -Contraction( τ ≺ H , 1 ) . W e start with the same graph G ϕ defined in the pro of of Theorem 4 , and we mo dify it as follows. In order to define the graph G H ϕ , we distinguish tw o cases according to the parit y of i , the num b er of v ertices in H = P i . In this pro of, whenever we attac h a path, we choose as attachmen t vertices the endvertices of the path. If i ≥ 4 is even, we replace each of the edges b etw een tw o vertices in A or tw o vertices in B by a P i 2 +1 , and w e attach a P i 2 to each v ertex in A ∪ B . If i ≥ 5 is o dd, we replace each of the edges b etw een tw o vertices in A or tw o vertices in B by a P i +1 2 , and w e attach a P i +1 2 to each v ertex in A ∪ B . The remainder of the construction of G H ϕ is the same for b oth i ev en and o dd. W e replace eac h edge b etw een a vertex in A and a vertex in B b y a P 3 (note that this do es not dep end on i ) and, for each suc h a P 3 , let z b e the internal v ertex in it. Attac h a p endent copy of H 2 u to z , where H = P i and u is one of the endv ertices of P i . This concludes the construction of G H ϕ ; see Figure 2 for examples for H = P 4 and H = P 5 . a x,C 1 ,` a x,C 2 , ¯ ` a x,C 3 ,` a x b C 1 ,` 2 b C 1 ,` 1 b C 1 ,` 3 z (a) (b) a x,C 1 ,` a x,C 2 , ¯ ` a x,C 3 ,` a x b C 1 ,` 2 b C 1 ,` 1 b C 1 ,` 3 z s s Figure 2 Illustration of the graph G H ϕ for (a) H = P 4 and (b) H = P 5 . Again, supp ose first that ≺ is the subgraph relation. The main prop erties of G H ϕ are the same as in Theorem 4 : w e ma y assume that a minimum P i -hitting set X ⊆ V ( G H ϕ ) 12 Reducing graph transversals via edge contractions con tains exactly one of the pairs { a x,C 1 ,` , a x,C 3 ,` } and { a x , a x,C 2 , ¯ ` } for each v ariable x , that X con tains exactly | C | − 1 vertices in the set { b C,` | ` ∈ C } for each clause C , and that X con tains precisely the attachmen t vertex of ev ery copy of H 2 u (cf. vertices s in Figure 2 ). Note that since all the graphs in H \ { P i } are 2 -connected by hypothesis, and for any P i -hitting set X ev ery connected comp onent of G H ϕ \ X is a tree, it follows that any P i -hitting set of G H ϕ is also an H -hitting set of G H ϕ . Moreov er, by construction of G H ϕ , these prop erties are preserv ed in G H ϕ /e for an y edge e ∈ E ( G H ϕ ) . T aking in to account the ab ov e discussion, it can b e verified that the current graph G H ϕ satisfies Claims 5 , 6 , and 7 in the pro of of Theorem 4 , by using the same argumen ts; we omit the details. Thus, ϕ is satisfiable if and only if G H ϕ is a No -instance of 1 -Contraction( τ ≺ H , 1 ) for the subgraph relation, as we wan ted to pro ve. As for other containmen t relations, let X b e a P i -hitting set for some of the considered relations. Since P i or any 2 -connected graph in H do es not o ccur in G H ϕ \ X nor in ( G H ϕ /e ) \ X for any edge e , for any of the subgraph, induced subgraph, minor, or top ological minor relations, the same arguments apply . J Note that the pro of of Theorem 10 do es not work for H = P 3 . Indeed, in the construction of G H ϕ for odd i , w e replace the edges with b oth endvertices in A or in B b y a P i +1 2 ; for i = 3 this results in an edge b etw een such a pair, whose contraction w ould identify b oth vertices, hence violating the main prop erties of the reduction. Finally , note also that, as in Theorem 4 , the reductions given in Theorem 9 and Theorem 10 also rule out the existence of sub exp onen tial algorithms assuming the ETH . 4 The case of Vertex Cover In this section we fo cus on the case where the considered in v ariant π is the size of a minimum v ertex cov er or, equiv alently , where π = τ ≺ K 2 for ≺ b eing any of the subgraph, induced subgraph, minor, or top ological minor containmen t relations. Recall that we use the notation vc to denote τ ≺ K 2 . It is easy to see that Contraction( vc ) is NP -hard, even if we assume that the v alue vc ( G ) is giv en along with the input. Indeed, the particular case d = vc ( G ) − 1 is the problem of reducing the vertex co ver n umber of the (connected) input graph G to one (i.e., obtaining a star) by doing at most k edge contractions. This problem is kno wn in the literature as St ar Contraction [ 27 , 32 ] and is equiv alent to Connected Ver tex Co ver (see [ 32 ] for a pro of ), which is known to b e NP -hard ev en on graphs for which computing a minim um vertex cov er can b e done in p olynomial time, such as bipartite graphs [ 18 ]. F ollowing Heggernes et al. [ 28 ], a 2 -c oloring of a graph G is a function φ : V ( G ) → { 1 , 2 } , and w e denote by V 1 φ and V 2 φ the sets of v ertices of V ( G ) colored 1 and 2, resp ectively . A set X ⊆ V ( G ) is a mono chr omatic c omp onent of φ if G [ X ] is a connected comp onent of G [ V 1 φ ] or G [ V 2 φ ] , and we denote by M φ the set of all mono chromatic comp onents of φ . The c ost of a 2 -coloring φ is defined as cost ( φ ) = P X ∈M φ ( | X | − 1) . W e will need the following lemma. I Lemma 11 (Heggernes et al. [ 28 ]) . A gr aph G has a 2 -c oloring of c ost at most k if and only if ther e exists a set F ⊆ E ( G ) of at most k e dges such that G/F is bip artite. The following simple observ ation concerning the 1 -Contraction( vc , 1 ) problem is the k ey insight to the algorithm of Theorem 15 . Let G b e a graph and let X b e a minim um v ertex co ver of G . W e define a 2 -coloring φ of G as follows. F or ev ery v ertex v ∈ V ( G ) , φ ( v ) = 1 if v ∈ X , and φ ( v ) = 2 otherwise. Since X is a vertex co ver, G [ V 2 φ ] is edgeless. Consider the graph G [ V 1 φ ] = G [ X ] , and distinguish tw o cases according to whether G is bipartite or not. If it is not, then since G [ V 2 φ ] is edgeless, necessarily G [ X ] contains some edge e (equiv alently , cost ( φ ) ≥ 1 ). Then contracting e results in a graph having a vertex cov er of size at most P . T. Lima, V. F. dos Santos, I. Sau and U. S. Souza 13 | X | − 1 , and therefore w e can conclude that G is a Yes -instance of the 1 -Contra ction( vc , 1 ) problem. Otherwise, if G is bipartite, w e can solv e 1 -Contraction( vc , 1 ) on G in p olynomial time b y first computing vc ( G ) in p olynomial time using the fact that G is bipartite [ 15 ], and then computing vc ( G/e ) for every edge e ∈ E ( G ) in p olynomial time as explained b elo w. If for some e ∈ E ( G ) , we hav e that vc ( G/e ) < vc ( G ) , we answer ‘ Yes ’, otherwise we answ er ‘ No ’ . T o compute vc ( G/e ) in p olynomial time, let w b e the v ertex resulting from the con traction of e and, letting G e := G/e , note that vc ( G e ) = min { 1 + vc ( G e \ { w } ) , | N ( w ) | + vc ( G e \ N [ w ]) } , and that b oth G e \ { w } and G e \ N [ w ] are bipartite, so a minimum vertex co ver in them can b e computed in p olynomial time. Summarizing, the algorithm to solve 1 -Contra ction( vc , 1 ) in p olynomial time works as follo ws: w e first chec k whether G is bipartite (in p olynomial time). If it is not, we answer ‘ Yes ’ (without needing to compute any minimum vertex co v er). If it is, we solve the problem in p olynomial time as discussed ab ov e. In Theorem 15 (cf. Algorithm 1 ) w e generalize this idea to solve Contra ction( vc , d ) in p olynomial-time for ev ery fixed d ≥ 1 . W e first need some technical lemmas. I Lemma 12. L et G b e a gr aph, d ≥ 1 an inte ger, and C a c onne cte d c omp onent of G such that vc ( C ) ≥ d + 1 . Then ther e exists a set F ⊆ E ( G ) with | F | ≤ 2 d such that vc ( G/F ) ≤ vc ( G ) − d . Pro of. The main observ ation is that for any connected graph H suc h that vc ( H ) ≥ 2 , any minim um vertex cov er X of H con tains tw o vertices u, v within distance at most t w o in H . Indeed, either H [ X ] contains an edge, and we choose u, v to b e the endvertices of that edge, or since H is connected and vc ( H ) ≥ 2 , necessarily there is a vertex in V ( H ) \ X with at least tw o neighbors in X , whic h we choose as u, v . In both cases, con tracting a shortest path (of length at most tw o) b etw een suc h vertices u and v results in a graph H 0 with vc ( H 0 ) ≤ vc ( H ) − 1 . Let G , d , and C b e as in the statement of the lemma. Since vc ( C ) ≥ d + 1 , we can recursiv ely apply d times the abov e observ ation to C , hence obtaining a set F ⊆ E ( C ) ⊆ E ( G ) of size at most 2 d suc h that vc ( C /F ) ≤ vc ( C ) − d . Since the size of a minimum vertex co ver is additive with resp ect to connected comp onen ts, we hav e that vc ( G/F ) ≤ vc ( G ) − d . J I Lemma 13. L et G b e a gr aph, d ≥ 1 an inte ger, and supp ose that for every c onne cte d c omp onent C of G , it holds that vc ( C ) ≤ d . Then the Min-Contraction( vc ) pr oblem with input ( G, d ) c an b e solve d in time f ( d ) · n O (1) for some c omputable function f . Pro of. Let C 1 , . . . , C p b e the connected components of G . Since vc ( C i ) ≤ d for i ∈ [ p ] , it is easy to observe that t w ( G ) ≤ d + 1 . F or every t wo in tegers i, d 0 with i ∈ [ p ] and 0 ≤ d 0 ≤ d , w e apply Prop osition 2 to solve Min-Contraction( vc ) with input ( C i , d 0 ) in time f ( d ) · n for some computable function f . F or this, we just hav e to v erify that the Min-Contraction( vc ) problem on ( C i , d 0 ) can b e expressed by an MSO 2 form ula whose length dep ends only on d . Indeed, it consists of finding the minimum size of a set F ⊆ E ( C i ) suc h that vc ( C i /F ) ≤ vc ( C i ) − d 0 . T o express the latter inequality b y an MSO 2 form ula with length dep ending on d , we crucially use the assumption that vc ( C i ) ≤ d . T o do this, w e first compute ` := vc ( C i ) independently with a standard MSO 2 form ula (or with a standard branching algorithm, since we are assuming that vc ( C i ) ≤ d ). Then the inequality “ vc ( C i /F ) ≤ ` − d 0 ”, where we hav e that ` − d 0 ≤ d , can b e expressed as the existence of a set of vertices S := { v 1 , . . . , v ` − d 0 } ⊆ V ( C i ) such that every edge in E ( C i ) \ F has an endp oint 14 Reducing graph transversals via edge contractions in S or has an endp oint u ∈ V ( F ) such that there exists a vertex v ∈ S and a path from u to v in C i using only edges in F . (This latter case captures the fact that an edge e of C i /F can also b e cov ered b y a vertex v ∈ V ( F ) that b ecomes even tually an endp oint of e after con tracting the edges in F .) Let opt ( C i , d 0 ) b e the output of Min-Contra ction( vc ) with input ( C i , d 0 ) , for i ∈ [ p ] and 0 ≤ d 0 ≤ d . W e assume that opt ( C i , d 0 ) = ∞ if vc ( C i ) ≤ d 0 , and opt ( C i , 0) = 0 . With this information at hand, we presen t a simple dynamic programming algorithm to solv e the Min-Contraction( vc ) problem with input ( G, d ) within the claimed running time. Let dp ( i, j ) b e the minim um size of a set F ⊆ E ( C 1 ) ∪ . . . ∪ E ( C i ) such that vc ( G/F ) ≤ vc ( G ) − j , or ∞ if such set do es not exist. Note that, in order to compute dp ( i, j ) , if in an optimal solution the size of a minimum vertex cov er drops by q in C i , then dp ( i, j ) = dp ( i − 1 , j − q ) + opt ( C i , q ) . Then dp ( i, j ) can b e computed as follows. dp ( i, j ) = 0 if j = 0 , ∞ if i = 0 and j > 0 , min 0 ≤ q ≤ j dp ( i − 1 , j − q ) + opt ( C i , q ) otherwise. Note that each dp ( i, j ) can b e computed in time O ( j ) . Recall that p is the num b er of connected comp onents of G . Hence, since p ≤ n , dp ( i, j ) can b e computed for each pair i, j in total time O ( n · d 2 ) and the answer is given b y dp ( p, d ) . J The bip artite c ontr action numb er of a graph G , denoted by b c ( G ) , is the minimum size of a set F ⊆ E ( G ) such that G/F is bipartite. W e will use the following result of Heggernes et al. [ 28 ] as a subroutine in our algorithms. Note that [ 26 ] presents a faster algorithm. I Prop osition 14 (Heggernes et al. [ 28 ]) . Given a gr aph G and a p ositive inte ger k , de ciding whether b c ( G ) ≤ k is FPT p ar ameterize d by k . W e finally hav e all the ingredients to present our main algorithm. I Theo rem 15. The Contraction( vc ) pr oblem is in XP p ar ameterize d by d . In p articular, Contraction( vc , d ) is p olynomial-time solvable for every fixe d d ≥ 1 . Pro of. Let ( G, k , d ) b e the input of Contraction( vc ) , and let n = | V ( G ) | . The XP algorithm that w e pro ceed to present is summarized in Algorithm 1 . Note that since the con traction of an edge may drop the minim um v ertex cov er of a graph b y at most one, we ma y assume that k ≥ d , as otherwise the answ er is trivially ‘ No ’ . W e start by chec king whether b c ( G ) ≤ d − 1 by using Prop osition 14 in time f ( d ) · n O (1) . W e distinguish tw o cases. Assume first that b c ( G ) ≥ d , and let X b e a minimum vertex co v er of G , whic h is only used for the analysis. W e define a 2 -coloring φ of G as follows. F or every vertex v ∈ V ( G ) , φ ( v ) = 1 if v ∈ X , and φ ( v ) = 2 otherwise. Since X is a vertex cov er, G [ V 2 φ ] is edgeless. Since b c ( G ) ≥ d , Lemma 11 implies that cost ( φ ) ≥ d , which in turn implies, since G [ V 2 φ ] is edgeless, that G [ V 1 φ ] = G [ X ] contains a set of connected comp onents M suc h that P X ∈M ( | X | − 1) ≥ d . Then contracting in G an y set F of d edges of a spanning forest of M results in a graph G/F suc h that vc ( G/F ) ≤ vc ( G ) − d . Since w e may assume that k ≥ d , in this case w e can safely answer ‘ Yes ’ . Otherwise, we hav e that b c ( G ) ≤ d − 1 . Let C 1 , . . . , C p b e the connected comp onents of G . F or every i ∈ [ p ] , we c hec k whether vc ( C i ) ≤ d in time 2 O ( d ) · n O (1) b y using an FPT algorithm for Ver tex Cover [ 13 ]. W e distinguish again tw o cases. P . T. Lima, V. F. dos Santos, I. Sau and U. S. Souza 15 Algo rithm 1 XP algorithm for the Contraction( vc ) problem parameterized by d . Input: A triple ( G, k , d ) with n = | V ( G ) | . if k < d then return No . else ( k ≥ d ) Chec k whether b c ( G ) ≤ d − 1 in time f ( d ) · n O (1) b y Prop osition 14 . if bc ( G ) ≥ d then return Yes . else ( b c ( G ) < d ) Let C 1 , . . . , C p b e the connected comp onents of G . F or i ∈ [ p ] , chec k whether vc ( C i ) ≤ d in time 2 O ( d ) · n O (1) . if vc ( C i ) ≤ d for every i ∈ [ p ] then Solv e Min-Contraction( vc ) with input ( G, d ) in time f ( d ) · n O (1) b y Lemma 13 . Let k 0 b e the optimal solution. if k ≤ k 0 then return Yes . else ( k > k 0 ) return No . else (there is a comp onen t C with vc ( C ) ≥ d + 1 ) if k ≥ 2 d then return Yes by Lemma 12 . else ( k < 2 d ) En umerate all sets F ⊆ E ( G ) with | F | ≤ k ≤ 2 d − 1 in time n O ( d ) . F or each F , compute vc ( G/F ) in time 2 O ( d ) · n O (1) . if for some F , vc ( G/F ) ≤ vc ( G ) − d then return Yes . else (there is no F such that vc ( G/F ) ≤ vc ( G ) − d ) return No . If vc ( C i ) ≤ d for every i ∈ [ p ] , we apply Lemma 13 and solve the Min-Contraction( vc ) problem with input ( G, d ) in time f ( d ) · n O (1) for some computable function f . If the optimal solution is larger than k , we answer ‘ No ’, otherwise we answer ‘ Yes ’ . Otherwise, there exists a connected comp onent C of G suc h that vc ( C ) ≥ d + 1 . By Lemma 12 , there exists a set F ⊆ E ( G ) with | F | ≤ 2 d suc h that vc ( G/F ) ≤ vc ( G ) − d . Hence, if k ≥ 2 d , we answer ‘ Yes ’ . Otherwise, w e hav e that k ≤ 2 d − 1 , and we solve the problem in time n O ( d ) as follo ws. W e enumerate all candidate sets F ⊆ E ( G ) with | F | ≤ k ≤ 2 d − 1 , whic h are n O ( d ) man y , and for each such a set F , compute vc ( G/F ) in time 2 O ( d ) · n O (1) as explained b elow. With the same technique we are also able to compute vc ( G ) within the same runtime b ound. If for some such a set F , we ha v e that vc ( G/F ) ≤ vc ( G ) − d , we answ er ‘ Yes ’, otherwise we answer ‘ No ’ . Let us now see, given a set F ⊆ E ( G ) with | F | ≤ k ≤ 2 d − 1 , how vc ( G/F ) can b e computed in time 2 O ( d ) · n O (1) . T o do that, w e start by finding a set B ⊆ V ( G/F ) with | B | = O ( d ) such that ( G/F ) \ B is bipartite, as explained in the next paragraph. Once w e hav e the set B at hand, we can guess which vertices of B b elong to the v ertex cov er. Since | B | = O ( d ) , this can b e done within the claimed running time. W e can now delete the vertices of B from G/F , together with N ( v ) for every v ∈ B suc h that v b elongs to the 16 Reducing graph transversals via edge contractions v ertex cov er. The remaining graph is bipartite, hence w e can compute a minimum vertex co ver of it in p olynomial time. Note that this pro cedure works even if F = ∅ , hence vc ( G ) can also b e computed in time 2 O ( d ) · n O (1) . Therefore, to conclude the pro of if it enough to find such a set B ⊆ V ( G/F ) . Recall that w e are in the case where b c ( G ) ≤ d − 1 . Let L ⊆ E ( G ) with | L | ≤ d − 1 such that G/L is bipartite, obtained in time FPT in d b y Prop osition 14 (it is easy to see that the FPT algorithm for the decision version can also obtain in FPT time the corresp onding set of edges to b e contracted). Note that G \ V ( L ) is also bipartite. Let V F b e the set of v ertices in V ( G/F ) resulting from the contraction of F . W e set B := V ( L ) ∪ V F . Note that | B | ≤ | V ( L ) | + | V F | ≤ 2( d − 1) + 2(2 d − 1) = O ( d ) and that ( G/F ) \ B is a subgraph of G \ V ( L ) , hence it is bipartite as well, and the theorem follows. J F rom the XP algorithm given in Theorem 15 we easily get the following corollary . I Corolla ry 16. The Min-Contraction( vc ) pr oblem c an b e 2-appr oximate d in FPT time p ar ameterize d by d . Pro of. Let ( G, d ) b e the input of the Min-Contraction( vc ) problem, and let k 0 b e the desired minimum num b er of contractions to drop the v ertex cov er num b er of G b y at least d , so necessarily k 0 ≥ d . Note that the algorithm given in Theorem 15 (cf. Algorithm 1 ) either concludes that there is no feasible solution (in case k 0 < d ), or concludes that k 0 = d (in case b c ( G ) < d ), or solves optimally the Min-Contraction( vc ) problem with input ( G, d ) (in case vc ( C i ) ≤ d for every connected comp onent C i of G ), except in the case where there exists a comp onent C of G suc h that vc ( C ) ≥ d + 1 . That is, this algorithm in fact solves the Min-Contraction( vc ) problem with input ( G, d ) except for this latter case, whic h is in fact the only step of the algorithm that is not FPT in d , since we need to enumerate the candidate sets F ⊆ E ( G ) of size at most 2 d − 1 . But if we are aiming at a 2 -appro ximation algorithm, in the case where there is a comp onent C of G with vc ( C ) ≥ d + 1 , w e can just apply Lemma 12 directly and conclude that k 0 ≤ 2 d . Since k 0 ≥ d , this yields a 2-approximation that runs in time FPT parameterized by d . J 5 Conclusions and further resea rch W e pro vided co-NP -hardness results for the 1 -Contraction( τ ≺ H , 1 ) problem when H con tains only 2 -connected graphs and at least one of them is not a clique (Theorem 4 ), when H consists of cliques but only for the minor and top ological minor con tainment relations (Theorem 9 ), and when H con tains a path on at least four vertices and 2 -connected graphs (Theorem 10 ). Sev eral interesting cases remain op en, for instance when H = { H } with H = P 3 , H = K h with h ≥ 3 (for the subgraph and induced subgraph relations), or H b eing an arbitrary tree. The cases where H may con tain disconnected graphs seem to b e trickier. F or the cases that are co-NP -hard, it is natural to parameterize the problem b y τ ≺ H , that is, b y the v alue of the parameter in the input graph G . If ≺ is the minor relation and H con tains some planar graph, it is well-kno wn [ 37 ] that the treewidth of G is b ounded by τ ≺ H ( G ) plus a function that dep ends only on H . In this case, the Contraction( τ ≺ H ) problem is FPT parameterized by τ ≺ H ( G ) + k , since it can b e expressed by an MSO 2 form ula with length dep ending only on k (note that w e may assume that k ≥ d ), and therefore it can b e solved in time f ( τ ≺ H ( G ) , k ) · n b y Courcelle’s Theorem [ 11 ]. In particular, this observ ation yields that when H = { K 3 } , the Contraction( fvs ) problem is FPT parameterized by fvs + k . When H = { K 2 } , that is, when τ ≺ H is the size of a minimum vertex co v er, we pro ved that the Contraction( vc ) problem parameterized by d is in XP (Theorem 15 ) and can b e 2- P . T. Lima, V. F. dos Santos, I. Sau and U. S. Souza 17 appro ximated in FPT time (Corollary 16 ). The natural question is whether Contraction( vc ) is FPT or W [1]-hard parameterized by d . W e tend to b eliev e that the former case holds. In fact, we do not even kno w whether the problem is FPT parameterized by k (recall that we ma y assume that k ≥ d ). A c knowledgemen t . W e w ould like to thank the anonymous reviewers of the conference and journal versions of this article for helpful remarks that improv ed the presen tation of the man uscript. References 1 Stefan Arnborg, Jens Lagergren, and Detlef Seese. Easy problems for tree-decomp osable graphs. Journal of Algorithms , 12(2):308–340, 1991. doi:10.1016/0196- 6774(91)90006- K . 2 Cristina Bazgan, Cédric Bentz, Christophe Picouleau, and Bernard Ries. Blo ck ers for the stabilit y n umber and the c hromatic n umber. Gr aphs and Combinatorics , 31(1):73–90, 2015. doi:https://doi.org/10.1007/s00373- 013- 1380- 2 . 3 Cristina Bazgan, Sonia T oubaline, and Zsolt T uza. The most vital no des with resp ect to indep enden t set and vertex cov er. Discr ete Applie d Mathematics , 159:1933–1946, 10 2011. doi:10.1016/j.dam.2011.06.023 . 4 Cédric Bentz, Costa Marie-Christine, Dominique de W erra, Christophe Picouleau, and Bernard Ries. Block ers and transversals in some subclasses of bipartite graphs: when caterpillars are dancing on a grid. Discr ete Mathematics , 310:132–146, 01 2010. doi:10.1016/j.disc.2009. 08.009 . 5 Hans L. Bo dlaender, Pinar Heggernes, and Daniel Lokshtano v. Graph mo dification problems (dagstuhl seminar 14071). Dagstuhl R ep orts , 4(2):38–59, 2014. doi:10.4230/DagRep.4.2.38 . 6 Béla Bollobás, Paul A. Catlin, and Paul Erdős. Hadwiger’s Conjecture is T rue for Almost Every Graph. Eur op e an Journal of Combinatorics , 1(3):195–199, 1980. doi:10.1016/S0195- 6698(80) 80001- 1 . 7 Márcia R. Cerioli, Cristina G. F ernandes, Renzo Gómez, Juan Gutiérrez, and Paloma T. Lima. T ransversals of longest paths. Discr ete Mathematics , 343(3):111717, 2020. doi: 10.1016/j.disc.2019.111717 . 8 Márcia R. Cerioli and Paloma T. Lima. Intersection of longest paths in graph classes. Discr ete Applie d Mathematics , 2019. doi:10.1016/j.dam.2019.03.022 . 9 Guan tao Chen, Julia Ehrenmüller, Cristina G. F ernandes, Carl Georg Heise, Songling Shan, Ping Y ang, and Amy N. Y ates. Nonempty intersection of longest paths in series–parallel graphs. Discr ete Mathematics , 340(3):287–304, 2017. doi:10.1016/j.disc.2016.07.023 . 10 Marie-Christine Costa, Dominique de W erra, and Christophe Picouleau. Minim um d -blo c kers and d -transv ersals in graphs. Journal of Combinatorial Optimization , 22(4):857–872, 2011. doi:10.1007/s10878- 010- 9334- 6 . 11 Bruno Courcelle. The Monadic Second-Order Logic of Graphs. I. Recognizable Sets of Finite Graphs. Information and Computation , 85(1):12–75, 1990. doi:10.1016/0890- 5401(90) 90043- H . 12 Christophe Cresp elle, P ål Grønås Drange, F edor V. F omin, and P etr A. Golo v ac h. A surv ey of parameterized algorithms and the complexit y of edge mo dification, 2020. . 13 Marek Cygan, F edor V. F omin, Lukasz K ow alik, Daniel Lokshtano v, Dániel Marx, Marcin Pilip czuk, Michal Pilip czuk, and Saket Saurabh. Par ameterize d Algorithms . Springer, 2015. doi:10.1007/978- 3- 319- 21275- 3 . 14 Marek Cygan, Dániel Marx, Marcin Pilipczuk, and Michal Pilip czuk. Hitting forbidden subgraphs in graphs of b ounded treewidth. Information and Computation , 256:62–82, 2017. doi:10.1016/j.ic.2017.04.009 . 15 Reinhard Diestel. Gr aph The ory, 4th Edition , volume 173 of Gr aduate texts in mathematics . Springer, 2012. URL: https://dblp.org/rec/books/daglib/0030488.bib . 18 Reducing graph transversals via edge contractions 16 Özn ur Y aşar Diner, Daniël P aulusma, Christophe Picouleau, and Bernard Ries. Contraction and deletion block ers for p erfect graphs and H -free graphs. The or etic al Computer Scienc e , 746:49–72, 2018. doi:10.1016/j.tcs.2018.06.023 . 17 Ro dney G. Downey and Michael R. F ellows. F undamentals of Par ameterize d Complexity . T exts in Computer Science. Springer, 2013. doi:10.1007/978- 1- 4471- 5559- 1 . 18 Bruno Escoffier, Lauren t Gourvès, and Jérôme Monnot. Complexity and approximation results for the connected vertex co ver problem in graphs and hypergraphs. Journal of Discr ete Algorithms , 8(1):36–49, 2010. doi:10.1016/j.jda.2009.01.005 . 19 F edor V. F omin, Daniel Loksh tanov, Iv an Mihajlin, Saket Saurabh, and Meirav Zehavi. Computation of hadwiger n um b er and related con traction problems: Tigh t lo wer b ounds, 2020. arXiv:2004.11621 . 20 F edor V. F omin, Sak et Saurabh, and Neeldhara Misra. Graph mo dification problems: A mo dern p ersp ective. In Pr o c. of the 9th International F r ontiers in Algorithmics W orkshop (F A W) , volume 9130 of LNCS , pages 3–6, 2015. doi:10.1007/978- 3- 319- 19647- 3\_1 . 21 Esther Galby , Paloma T. Lima, and Bernard Ries. Reducing the domination num b er of graphs via edge contractions and vertex deletions. Discr ete Mathematics , 344(1):112169, 2021. doi:10.1016/j.disc.2020.112169 . 22 Esther Galby , F elix Mann, and Bernard Ries. Blo cking total dominating sets via edge con tractions, 2020. . 23 Esther Galb y , F elix Mann, and Bernard Ries. Reducing the domination num b er of P 3 + k P 2 -free graphs via one edge contraction, 2020. . 24 Mic hael R. Garey and Da vid S. Johnson. Computers and Intr actability: A Guide to the The ory of NP-Completeness . W. H. F reeman, 1979. URL: https://dblp.org/rec/books/fm/ GareyJ79.bib . 25 P etr A. Golo v ach, Pinar Heggernes, Pim v an ’t Hof, and Christophe P aul. Hadwiger n umber of graphs with small chordalit y . SIAM Journal on Discr ete Mathematics , 29(3):1427–1451, 2015. doi:10.1137/140975279 . 26 Sylv ain Guillemot and Dániel Marx. A faster FPT algorithm for Bipartite Contraction. Information Pr o cessing L etters , 113(22):906–912, 2013. doi:10.1016/j.ipl.2013.09.004 . 27 Pinar Heggernes, Pim v an ’t Hof, Benjamin Lévêque, Daniel Lokshtano v, and Christophe P aul. Contracting graphs to paths and trees. Algorithmic a , 68(1):109–132, 2014. doi: 10.1007/s00453- 012- 9670- 2 . 28 Pinar Heggernes, Pim v an ’t Hof, Daniel Lokshtano v, and Christophe P aul. Obtaining a bipartite graph by con tracting few edges. SIAM Journal on Discr ete Mathematics , 27(4):2143– 2156, 2013. doi:10.1137/130907392 . 29 R ussell Impagliazzo and Ramamohan P aturi. On the Complexity of k -SA T. Journal of Computer and System Scienc es , 62(2):367–375, 2001. doi:10.1006/jcss.2000.1727 . 30 R ussell Impagliazzo, Ramamohan Paturi, and F rancis Zane. Which Problems Hav e Strongly Exp onen tial Complexity? Journal of Computer and System Scienc es , 63(4):512–530, 2001. doi:10.1006/jcss.2001.1774 . 31 Eun Jung Kim, Martin Milanic, Jérome Monnot, and Christophe Picouleau. Complexity and algorithms for constant diameter augmen tation problems, 2020. . 32 Ramasw amy Krithika, Pranabendu Misra, Ashutosh Rai, and Prafullkumar T ale. Lossy k ernels for graph con traction problems. In Pro c. of the 36th IARCS A nnual Conferenc e on F oundations of Softwar e T e chnolo gy and The or etic al Computer Scienc e (FSTTCS) , volume 65 of LIPIcs , pages 23:1–23:14, 2016. doi:10.4230/LIPIcs.FSTTCS.2016.23 . 33 John M. Lewis and Mihalis Y annakakis. The No de-Deletion Problem for Hereditary Prop erties is NP-Complete. Journal of Computer and System Scienc es , 20(2):219–230, 1980. doi: 10.1016/0022- 0000(80)90060- 4 . 34 F oad Mahdavi Pajouh, Vladimir Boginski, and Eduardo Pasiliao. Minim um v ertex block er clique problem. Networks , 64:48–64, 08 2014. doi:10.1002/net.21556 . P . T. Lima, V. F. dos Santos, I. Sau and U. S. Souza 19 35 Daniël Paulusma, Christophe Picouleau, and Bernard Ries. Critical vertices and edges in H -free graphs. Discr ete Applie d Mathematics , 257:361–367, 2019. doi:10.1016/j.dam.2018.08.016 . 36 Dieter Rautenbac h and Jean-Sébastien Sereni. T ransversals of longest paths and cycles. SIAM Journal on Discr ete Mathematics , 28(1):335–341, 2014. doi:10.1137/130910658 . 37 Neil Rob ertson and Paul D. Seymour. Graph minors. V. Excluding a planar graph. Journal of Combinatorial The ory, Series B , 41(1):92–114, 1986. doi:10.1016/0095- 8956(86)90030- 4 . 38 T oshimasa W atanabe, T adashi Ae, and Akira Nakam ura. On the NP-hardness of edge- deletion and -contraction problems. Discr ete Applie d Mathematics , 6(1):63–78, 1983. doi: 10.1016/0166- 218X(83)90101- 4 . 39 Mihalis Y annakakis. No de- and Edge-Deletion NP-Complete Problems. In Pr o c. of the 10th A nnual A CM Symp osium on The ory of Computing (STOC) , pages 253–264, 1978. doi: 10.1145/800133.804355 .
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment