Stochastic Battery Model for Aggregation of Thermostatically Controlled Loads
The potential of demand side as a frequency reserve proposes interesting opportunity in handling imbalances due to intermittent renewable energy sources. This paper proposes a novel approach for computing the parameters of a stochastic battery model …
Authors: Sohail Khan, Mohsin Shahzad, Usman Habib
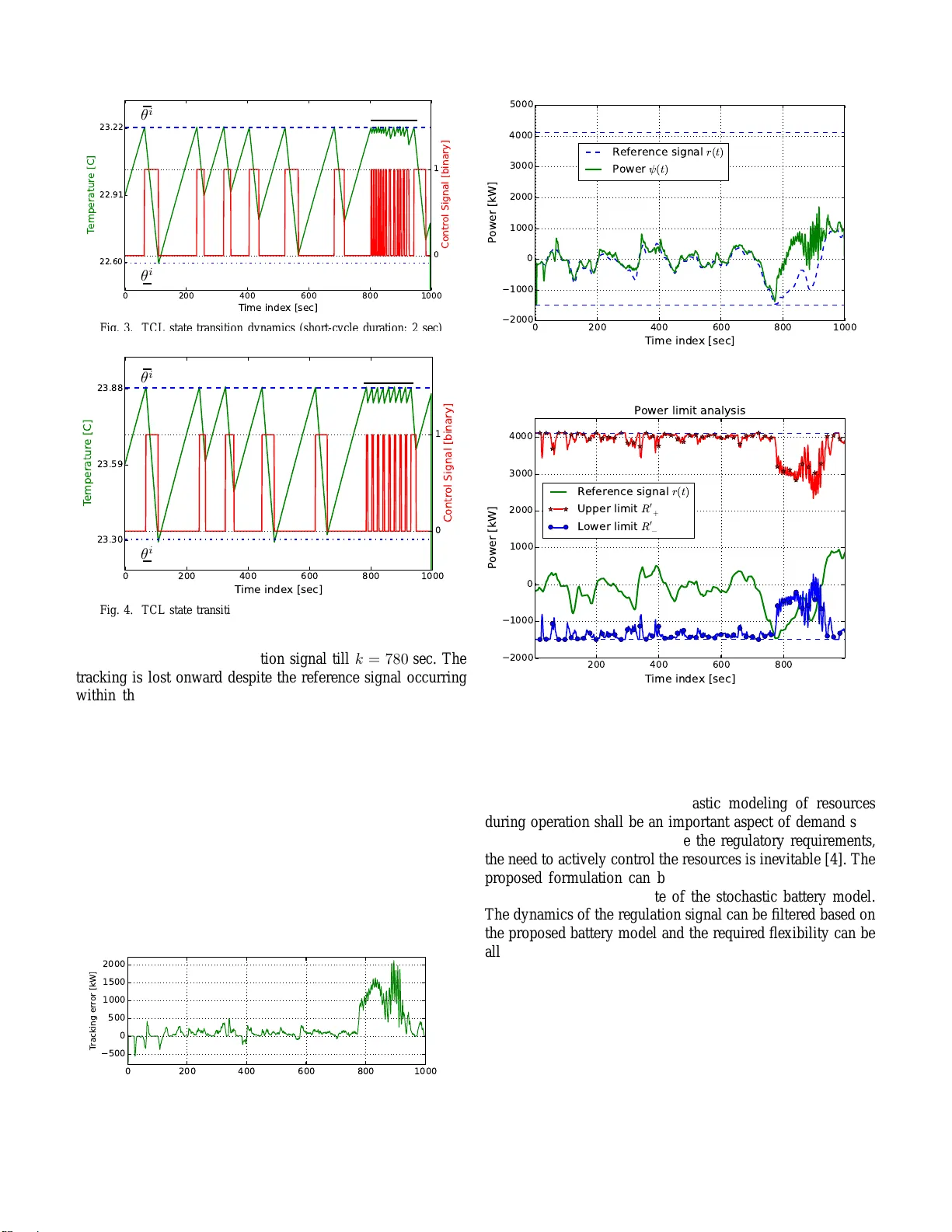
Stochastic Battery Model for Aggre gation of Thermostatical ly Controlled Loads Sohail Khan, Mohsin Sha hzad, Usman Habib AIT Austrian Institute of T echnolo gy , V ienna, Austria sohail.khan @ait.ac.at, { gi venname.surn ame } @ait.ac.at W olfgang Gawlik TU V ienna – Austria gawlik@ea.tuwien.ac.at Peter Palensky TU Delft – Nether lands p.palensky@tude lft.nl Abstract —The potential of demand sid e as a f requency reserv e proposes interesting opportunity in handling imbalances due to intermittent renewable e nergy sources. This paper proposes a nov el approach for computing the parameters of a stochastic battery model represe nting the aggregation of Thermostatically Controlled Loads (TCLs). A hysteresis based non-disru ptive con- trol is used usin g priority stack algorithm to track th e refer ence regulation signal. The parameters of admissible ramp-rate and the charge limits of the battery are dynamically calculated using the i nform ation from TCLs that is the status (on/off), a vailability and r elative temperature distance till the switching boundary . The approach build s on an d improv es on the existin g resear ch work by pr oviding a straight-forward mechani sm f or calculation of stochastic parameters of equ iva lent b attery model. The effectiv en ess of proposed approach is demonstrated by a test case ha vin g a large number of residential T CLs tracking a scaled down r eal frequency regulation signal. N O M E N CL A T U R E i Index of the TCL, from 1 to N . k T ime index, from 1 to T . θ i T emp erature of i th TCL. ∆ i T emp erature dead-band width of i th TCL. ψ Aggregate po wer deviation from the b ase value. δ Operationa l statu s of TCL ∈ (0 , 1) . ρ i T ime duration after status chang e of i th TCL. ρ i Short cycling time constraint of i th TCL. λ i TCL av ailability status ∈ (0 , 1) . π i Normalized temp erature distance to the switching bound ary of i th TCL. P i , P i 0 Rated and nom inal power of i th TCL. I . I N T RO D U C T I O N The balan ce between supply and deman d is the p rincipal control objective in the p ower system. In or der to achieve this balance the planning an d con trol is performed at v ar ious tim e scales rang ing from day-ah ead to seconds. Th e rise in dis- tributed gen eration from renewable energy sou rces like wind and solar have increased the u ncertainty at gen eration-sid e and th us, the imbalance pr obability [ 1]. G enerally , th e balance is achieved by activating the reser ve power fro m the online generato rs. This approach have proved to be effecti ve in power system. However , increase in th e level and volatility of the imbalance ha ve made i t an expensiv e choice. Thus the alternate sources of flexibility a re h ighly sou ght after . Am ong th em, a promising alternati ve is the active c ontrol o f Th ermostatically Controlled Lo ads (TCLs) e.g., air cond itioning and h eating units [ 2]. In these loads, th ere exists a flexibility arou nd the user set-point called the dead-band. A non-disru ptive operation can be achie ved by controlling the operation al state of the TCL within the d ead-ban d in order to track a ref erence activ e power signal [3]. Such that, the load can be incre ased o r decreased without causing discomfo rt to the customers. A. TCL a s fr equen cy r eserve The imbalance in supply and demand of activ e po wer results in frequ ency deviation from the nominal value. Frequ ency regulation is a rea l tim e objective and is critical fo r a se- cure o peration of the system. Th e time scale r equireme nts ranges fr om second s to min utes and thus limits the maximum admissible delay in th e respon se of reserve reso urces. The aggregation of residential TCLs can be a cost effecti ve and a secure alternative to the fast g eneration units or storag e solutions [4]. The ability of the TCL aggregation in responding to the real-time frequency regulation sign al has been reported in [5], [6]. Th e impa ct of using th is re source has b een f ocused in several regiona l studies. Such as, in [7], th e capability of using TCLs as a stor age ca pacity in Switzerland is discu ssed. The potential is interesting b ut the infrastructu re required at the TCL level to enable this techn ology is a limiting factor . This paper aim s to present a cost effectiv e appr oach fo r assessing the a vailability and the dynamic ca pability of this resource as stochastic parameters of an equ iv alen t b attery mode l. B. Literatur e surve y The aggregate behavior of large p opulatio n of TCLs stems out fro m the mod eling app roache s used. In literature, two approa ches are generally used for m odeling TCLs. The ind i- vidual load model of the TCL as a combinatio n of a continuous temperatur e state and a discre te “switching state” were first presented in [8]. Autho rs in [9 ] have verified this m odel fo r the real pop ulation of TCLs. The thr ee state mod el capturing the temper ature of thermal mass is discussed in [ 10]. More advance models are discussed in liter ature that aims to mod el the dy namics of T CL accurately [ 11]. The simu lation o f individual m odels can be challen ging for large nu mber of TCLS. However , this approach is suited for the simple co ntrol strategies [12]. The second approa ch is th e direct mode ling of the aggregation of TCLs. Recently , state space mo dels ha ve been explo red with much interest a s it f acilitates th e contro l design. Among such me thods, partial d ifferential equation based app roach is used fo r designing a sliding model contro l approa ch [1 3]. The representation of the TCL aggregation by a generalized battery and the calculation of its parameters are interesting resear ch areas a nd d epend on the m odeling and control strategies discussed above. The limits on the power a nd energy capacity that can be tracked by TCL aggregation are discussed in [3]. The values are calculated a s fun ction of the outdoo r temp erature. The other factors affecting the av ailability like c ustomer pr efer- ences are not considered. Author s in [14] have rece ntly pre- sented a gener alized battery m odel. T he p ower limits o n this model ar e d erived using continuou s power model. Similarly , authors in [15] ha ve m odeled th e stocha stic p arameters of the battery mod el. In these papers, the power consum ption at each TCL is requ ired to be m easured and sen t to th e central c ontrol. It can be an additional expense along w ith the co nsideration of measur ement uncer tainty in th e co ntinuo us variable. The dynamic battery par ameters are obtained from the historical informa tion of the switching status of TCLs. Alternatively , a novel mechanism of compu ting the stochastic battery p aram- eters is p roposed here. These par ameters are the maxim um ramp-u p/down values and the ch arging/discharging p otential of the battery . Analy tic expre ssions are provided to calculate these p arameters u sing status ( u i [ k ]) , av ailab ility ( λ i [ k ]) an d relativ e tempe rature distance to switching bou ndary ( π i [ k ]) . Fig. 1 shows the working pr inciple of the TCLs a ggregation control. The regulation signal r [ k ] is th e inpu t to the central control which communica tes with the TCLs an d control their operation al states. The e rror in the tracking sig nal is sent b ack for the monito ring purpose. Fig. 1. Ove rvie w of the control m echani sm Rest o f the paper is organized as fo llows. The m odel of TCL and sto chastic battery is discussed in Sec. II. T he implementatio n strategy of the sto chastic limits based control is presen ted in Sec . III. In Sec. IV, the test case and results are discussed and fo llowed by the con clusion in Sec. V. I I . S T O C H A S T I C B A T T E RY M O D E L A. Thermostatica lly Contr olled Load s In order to simulate the aggregation of TCL, a simplified first o rder m odel ha s been r eported widely in the literatu re [3], [8], [16]. It is given by a dif ferenc e equ ation, θ i [ k + 1 ] = g i θ i [ k ] + (1 − g i )( θ i a [ k ] − δ i [ k ] θ i g ) + ǫ i [ k ] , (1) where, g i = e − h/ ( R i C i ) ( h is th e samp ling time a nd R i C i is the time constant of the TCL), θ i g = R i P i η i and θ i a [ k ] is the ambien t temperature measurem ent at i th TCL. The fir st term rep resents the decaying influence o f th e temp erature in the p revious time step. While, the second term is temper ature gain/loss as the TCL is switch On/Off. P i is the rated power of TCL wh ich is po siti ve in case o f the air-conditionin g load and negativ e fo r the heater . Th e param eter ǫ i represents the n oise associated with the tem perature measu rement of i th TCL. Th e detail of other param eters ca n be f ound in T ab . I. The state transition of the coolin g TCL is given as [3], δ i [ k + 1] = 1 θ i [ k + 1] > θ i ref + ∆ i 0 θ i [ k + 1] < θ i ref − ∆ i δ i [ k ] otherw ise . (2) Here, ∆ i defines th e dead- band ar ound the reference set- point θ i ref . When TCL is operating o utside the dead-b and it is considered non- contro llable. In or der to per form the n on-d isruptive loa d contr ol, TCLs are activ ely contro lled while oper ating within the d ead- band [3]. In the steady state it is assumed that θ i = θ i ref . Th e correspo nding power consumption is obtained by solving the continuo us power model from [4], leading to , P o i [ k ] = θ i a [ k ] − θ i r η i R i . (3) It is reported in [3], that P o i [ k ] c an be considered as av erage power consumed by the TCL o perating in the stead y state. The baseline power co nsumptio n o f the TCL aggregation is gi ven as, P base [ k ] = X i P i o . (4) The instantaneous active power co nsumption at k is the sum of the rated power of all acti ve TCLs. It is given a s, P agg [ k ] = X i δ i [ k ] P i . (5) The d ifference between the aggregate and baseline p ower consump tion is g iv en as, ψ [ k ] = P agg [ k ] − P base [ k ] . (6) In this study the air-conditionin g TCLs are consid ered. Thus, ψ [ k ] > 0 when th e average temperature of the TCL is below the set-point. I t ind icates the n atural ph enomen on of temperatur e decrease when TCL is activ e. In order to use TCLs as a fr equency reserve, th e reference power imb alance signal, r [ k ] , must be f ollowed in re al-time. Th is can be a chieved b y adjusting the numb er of activ e TCLs in the agg regation in real-time. If the TCLs are collectively mod eled by a battery , then the referen ce sign al can charge o r discharge the battery when r [ k ] > ψ [ k ] and r [ t ] < ψ [ k ] resp ectiv ely . The ch arging process shall tu rn On while tu rning Off TCLs is refered as discharging process. B. Stochastic Battery Model P arameters The capac ity and maximum charge/discha rge rates of a stochastic battery mode l are gi ven as [4], C = X i 1 + 1 − a i α ∆ i b i R + = X i ( P i − P o i ) R − = X i P o i , (7) here, a i = 1 / ( R i C i ) , b i = η i /C i and d = 1 / N P i 1 / ( R i C i ) . This formulation enab les the calculation of the maximum capacity [kWh] av ailab le in the system as a stochastic v ariable. Howe ver, the a vailability of the TCL is a limiting factor in this regard. The consideration of the availability of TCLs results in a dynamic stochastic model of the ba ttery parameters. The are formu lated as, C ′ = X i λ i [ k ] 1 + 1 − a i α ∆ i b i R ′ + = R + − X i (1 − λ i [ k ]) P i R ′ − = R − + X i (1 − λ i [ k ]) P i , (8) where, the λ i [ k ] is th e a vailability of i th TCL given as, λ i [ k ] = 1 ρ i [ k ] > ρ i & θ i ≤ θ i [ k ] ≤ θ i 0 otherwise . (9) The stochastic ra mp-limit constraint on the re ference signal is considered by the following equation, R ′ − ≤ r [ k ] ≤ R ′ + . (10) While the state of the cha rge constraint is implemented as, − C ′ ≤ x [ k ] = X i θ i ref − θ i [ k ] b i ! ≤ C ′ . (11) Note: T he temp erature difference ( θ i r ef − θ i [ k ]) in Eq . 11 represents the temperatur e decrease when the A C is On. Equiv- alently , it represen ts the charging of the b attery . Stoch astic battery model is shown in Fig. 2. The dynamics of the v ariables are bound ed b y the stochastic limits a nd are given as, ˙ x [ k ] = − dx [ k ] − p [ k ] , x (0) = 0 , | x [ k ] | ≤ C ′ , (12) where, the dissipation rate ( d ) is given as, d = 1 N N X k =1 1 R i C i . (13) Fig. 2. Stocha stic Batte ry Model I I I . C O N T RO L S C H E M E A. Hyster esis Based Con tr ol A hysteresis based control approach is used in this work. In this approach, each TCL communicates its o perational status, availability and temp erature distance info rmation to the centra l co ntrol. The relative temper ature distance π i [ k ] of a TCL from its switching boundary is used as a p riority variable. The c entral control form ulate the merit o rder to turn On/Off the units b ased on th e least distanc e to the switching boun dary . This approa ch decreases the cycling of TCL un its. The fr equency regulation signal from an energy market is con sidered as a ref erence inpu t. This r eal time sign al is used to ch ange the state of i th TCL correspon ding to the regulation requirements. The condition when ψ [ k ] is eq ual to r [ k ] indicates th e succ essful trac king. When r [ k ] > ψ [ k ] , the algorithm at central control turns suf ficient numb er of a vailable units ON. This step is termed as charging of the battery . In case of A C loads the impact will b e d ecrease in the average TCL temperatur e from the set-po int value. Similarly , in conv erse case suffi cient number of On un its are tu rned Of f to follo w the regulation signal. The operation al mechanism at the central control is shown in Alg. 1. The algo rithm facilitates the ad dition/rem oval o f the TCLs in the network dyn amically . This can be easily captur ed during the update of the stochastic battery limits in Eq. 8 . The state tr ansitions δ i ∗ [ k ] triggere d by the ce ntral control are commun icated to the TCLs u sing th e co mmunicatio n network. At individual TCL level, a local contro l strategy is applied to respond to this inpu t. Th e co ntrol algorithm at the TCL is o utlined in Alg . 2. The e volution of the TCL internal temperatur e is modeled by E q. 1. T he TCL is av ailable if th e temperatur e lies in the d ead-ban d region and the sh ort cycling constraint is fulfilled. The sho rt cycling constrain t implies the min imum du ration of time th at a T CL must remain in a state after a state transition. The cycling is represented by ρ i [ k ] . The violation of this constraint or th e operation of the TCL o utside th e d ead-ban d implies the non-availability . The temperatur e distan ce o f the TCL fro m the switching boun dary is nor malized with respect to the dead- band wid th befo re transmitted to the centr al control. The real time referenc e signal is compar ed to the stochastic limits from Eq. 10. These limits can b e used as a filter to guaran tee the tracking of the ref erence signal. I f v iolated, the residu al can b e allocated to the other r esources in the network like spinn ing reserves an d storage. Furthermo re, the Algorithm 1: Algorithm at Main Control Input : TCL i da ta ( u i ( t ) , λ i ( t ) , π i ( t )) Output : Forced state of the TCL δ i ∗ 1 Calcula te battery parameters ( C , n + , n − ) ; 2 for t := 1 · · · T do (T ime iteration loop) 3 Sample input freq uency regulation signal r ( t ) ; 4 for i := 1 · · · N do (TCL iteration loop) 5 Sort priority list of av ailable On/Off TCLs; 6 Upd ate stochastic battery limits ( C ′ , n ′ + , n ′ − ) ; 7 if ( R ′ + ≤ r ( t ) ≤ R ′ − ) then 8 ξ = r ( t ) − ψ ( t ) ; 9 if r ( t ) < ψ ( t ) then (Priority list b ased contr o l) 10 T urn Off av ailab le TCLs till δ P < ξ ; 11 else 12 T urn On available TCLs till δ P < − ξ ; 13 else 14 Re gulation not possible ; Algorithm 2: Algorithm at TCL Input : Contro l sig nal δ i ∗ ( t ) Output : ( u i ( t + 1) , λ i ( t + 1) , π i ( t + 1)) 1 ( θ i ( t + 1) , δ i ( t + 1) , λ i ( t + 1)) = 0 ; 2 if ρ i ( t ) > ρ i then 3 λ i ( t + 1) = 1 ; 4 if δ i ∗ ( t ) is r eceived then 5 δ i ( t ) = δ i ∗ ( t ) ; 6 ρ i ( t ) = 0 ; 7 ρ i ( t + 1) = ρ i ( t ) + 1 ; 8 θ i ( t + 1) = g i θ i ( t ) + (1 − g i )( θ i a ( t ) − δ i ( t ) θ i g ) + ǫ i ( t ) ; 9 if θ i ≤ θ i ( t + 1) ≤ θ i then 10 δ i ( t + 1) = δ i ( t ) ; 11 else 12 λ i ( t + 1) = 0 ; 13 if θ i ( t + 1) < θ i then 14 δ i ( t + 1) = 0 ; 15 if δ i ( t ) = 1 then 16 ρ i ( t + 1) = 0 17 if θ i ( t + 1) > θ i then 18 δ i ( t + 1) = 1 ; 19 if δ i ( t ) = 0 then 20 ρ i ( t + 1) = 0 21 if δ i ( t + 1) = 1 then π i ( t ) = θ i ( t + 1) − θ i / ∆ i if δ i ( t + 1) = 0 then π i ( t ) = θ i − θ i ( t + 1) / ∆ i methodo logy provides a stoch astic en ergy state e stimation of the TCLs agg regation. B. Regulatory r equir ements Each system operator has spec ific regulato ry requiremen ts for en able the par ticipation of d emand side in th e frequ ency regulation process. F or e xamp le, CAISO has defined the non- generato r r esources to provide power b id on the basis o f their 15-min ute energy cap acity [6]. There ar e strict requ irements on the telemetr y of the TCL d ata. In this case, TCLs are required to up date th eir state of ch arge an d in stantaneou s power status every 4 secon ds. The minimum r esource size restriction also limits the potential o f th is resou rce. CAISO defines minimum resour ce size of 0.5 MW f or a TCL. This paper target small scale T CLs and the regu latory requ irements are con sidered during the con trol design. It comp liments the findings prop osed in [1 5] that th e contro l of large nu mber of residential TCLs can provide a reliable regulation service if the uncertainty in the av ailability are in herently taken into account during the operatio n. I V . R E S U LT S A. Experimen tal setup The aggregation is co mposed o f 1000 TCLs. The speci- fications are ob tained using the table I. Th e parameters of each TCL are o btained by samplin g the normal distribution around the values. Her e, th e limits a re taken as the percentag e deviation from the m entioned quantity . Th ese limits can b e controlled to alter the heterogeneity in the aggregation. The heteroge neity o f 30% is considered . The TCL model time step is 10 . 02 sec . The TCLs are initialized at th e steady state T ABLE I P A R A M E T E R S O F A TY P I C A L R E S I D E N T I A L AC T C L [ 4 ] Parameter Description V alue Unit C i Thermal capacitance 2 kWh/ ◦ C R i Thermal resistance 2 ◦ C/kW θ i r ef T emp erature 22.5 ◦ C ∆ dead-b and leng th 2.5 ◦ C P i Nominal power 5.6 kW η Coefficient of perfo rmance 0.3 temperatur e condition θ i [ k ] = θ i r ef . Th e refere nce signal is a no rmalized scaled do wn version of the frequ ency r egulation signal from the PJM market [17 ] and is used to test the tracking perfor mance of the stochastic battery model. B. Simula tion Results Fig. 3 p rovides as in sight into the tem perature dyn amics of the TCL when actively controlled extern ally . It can be observed that the temperatu re e volves in dead-ban d and the state tran sition occ urs at the bound aries. While in between the temperatur e limits, the e xternal signal can change the op era- tional state provided the short c ycling constraint is fulfilled. Fig. 4 sho ws the i mpact of the s hort cycling duration wh en increased from 2 sec. to 6 sec . The short cycling duration values are selected for the pro of of con cept a nd can be con venien tly changed to represen t the actual requiremen ts. It is o bserved that when time is between 780 to 950 the TC L experiences repeated activation. This pheno menon is explained later on when the tracking of r egulation sig nal is discussed. The repea ted ac ti vation ph enomen on can be o bserved by analysis o f th e regulation signal dynam ics. The tracking per- forman ce for the test case is shown in Fig. 6. The TCLs 0 2 0 0 4 0 0 6 0 0 8 0 0 1 0 0 0 T i m e i n d e x [ se c ] 2 2 . 6 0 2 2 . 9 1 2 3 . 2 2 T e m p e r a t u r e [ C ] 0 1 C o n t r o l S i g n a l [ b i n a r y ] θ i θ i Fig. 3. TCL state transitio n dyna mics (short-cycl e duration: 2 sec) 0 2 0 0 4 0 0 6 0 0 8 0 0 1 0 0 0 T i m e i n d e x [ se c ] 2 3 . 3 0 2 3 . 5 9 2 3 . 8 8 T e m p e r a tu r e [ C ] 0 1 C o n tr o l S i g n a l [ b i n a r y ] θ i θ i Fig. 4. TCL state transitio n dyna mics (short-cycl e duration: 6 sec) aggregation tracks the regulation signal till k = 7 80 sec. The tracking is lost on ward despite the refere nce signal occurrin g within the r egulation bounds. The rea son behind is that the referenc e signal vio lates the stochastic limit constrain ts. This aspect is ca ptured by dyn amic lim its in Eq. 8. The track ing error as the result of vio lation of this con straint can be seen in Fig. 5 . The stochastic regulation limits for this case are shown in Fig.7. I t can b e o bserved that the reference sign al violates the stochastic ramp- rate limits. The r easons b ehind the d ecrease in the perm issible ramp- rate limits is the th e unav ailability of the TCLs shown in Fig. 9. Furthermore, the stochastic capacity limit of the battery giv en as C ′ also changes with time. The dyn amics are sho wn in Fig. 8. The formu lation provides dyn amic bound s on these variables. The tracking of the regulation signal is ensured if the stochastic SoC and ramp -rate limits are fulfilled. 0 2 0 0 4 0 0 6 0 0 8 0 0 1 0 0 0 T i m e i n d e x [ se c ] − 5 0 0 0 5 0 0 1 0 0 0 1 5 0 0 2 0 0 0 T ra c ki n g e r r o r [ kW ] Time [sec ] Fig. 5. T racking error 0 2 0 0 4 0 0 6 0 0 8 0 0 1 0 0 0 T i m e i n d e x [ se c ] −2 0 0 0 −1 0 0 0 0 1 0 0 0 2 0 0 0 3 0 0 0 4 0 0 0 5 0 0 0 P o w e r [ k W ] R e fe r e n c e si g n a l r ( t ) Po w e r ψ ( t ) R + R − Fig. 6. T racking performance of the regul ation signal 2 0 0 4 0 0 6 0 0 8 0 0 T i m e i n d e x [ se c ] − 2 0 0 0 − 1 0 0 0 0 1 0 0 0 2 0 0 0 3 0 0 0 4 0 0 0 P o e r [ kW ] P o e r l i m i t a n a l y s i s R e fe r e n c e si g n a l r ( t ) U p p e r l i m i t R ′ + L o e r l i m i t R ′ − Fig. 7. T racking performance comparison with stochastic regulati on limits C. Outlook The results shows that sto chastic mod eling of reso urces during operation sh all be an im portan t aspect of demand side managem ent. In or der to ensu re the regulatory requirem ents, the n eed to actively con trol the resources is inevitable [ 4]. The propo sed formulation can be used to actively plan alterna te resources based on the state o f the stochastic battery m odel. The dy namics of the regulation signal can be filtered based on the prop osed battery mod el and the required flexibility can b e allocated to oth er resources. A mechan ism p roposed in [18 ] can be u sed f or this p urpose. Apar t from the direct control of the loads, th e price b ased and incentive based approach can be integrated in this f ramework as well. I n this case th e price or incentives can alter the behavior of th e TCL lo ads.The informa tion about the stochastic battery model parameter s thus provide a reference to facilitate operatio n under uncertainty . In case of the uncertain s hort cycling duration and commu- nication delay , a joint probability distribution can be used to predict the tracking accur acy wh ile using this model. 2 0 0 4 0 0 6 0 0 8 0 0 T i m e i n d e x [ se c ] −3 0 0 −2 0 0 −1 0 0 0 1 0 0 2 0 0 3 0 0 S ta t e o f C h a r g e ( S o C ) [ K W h ] E n e r g y s t a t e o f b a t t e r y S o C o f b a t te r y C a p a c i t y u p p e r l i m i t C ′ C a p a c i t y L o w e r L i m i t − C ′ Fig. 8. State of charge dynamics of the stochastic battery model 2 0 0 4 0 0 6 0 0 8 0 0 T i m e i n d e x [ se c ] 6 0 0 7 0 0 8 0 0 9 0 0 1 0 0 0 1 1 0 0 Nu m b e r o f T C L s a v a i l a b l e Time [sec ] Fig. 9. TCL av ailabilit y dynamics V . C O N C L U S I O N This paper pr esents an novel appr oach that b uilds upon the existing literature for calcu lating the stocha stic parameters of battery representing the TCL aggregation. The para meters o f stochastic state of c harge and c apacity limits are com puted while conside ring resourc es a vailability directly . The result are the pro babilistic bound s on the regulation signal dyn amics that if ob served g uarantee the track ing. The p resented appr oach prevents the calculatio n of the power at each TCL thus de- creasing the operation al cost. Altern ativ ely , it is prop osed here that the TCL ratings is provided in form of the contract with the cen tral c ontrol. The a vailability signal is co mmunica ted by the T CL to represent its current state. A TCL is r equired to commun icate the av ailability , status and relati ve temperature distance to switching boun dary which can be achieved with a nominal bandwid th. R E F E R E N C E S [1] Y . Makaro v , C. Loutan, J. Ma, and P . de Mello, “Opera tional impacts of wind generatio n on california power systems, ” P ower Systems, IEE E T ransactions on , vol. 24, no. 2, pp. 1039–1050, May 2009. [2] N. Lu and D. Chassin, “ A state-queu eing model of thermostatica lly control led applianc es, ” P ower Systems, IE EE T ransact ions on , vol. 19, no. 3, pp. 1666–1673, Aug 2004. [3] J. Mathie u, M. Kamgarpour , J. Lyg eros, and D. Callaw ay , “Energy arbitra ge with thermostatic ally controlled loads, ” in Contr ol Conf ere nce (ECC), 2013 Europea n , July 2013, pp. 2519–2526. [4] H. Hao, B. Sanandaji, K. Poolla, and T . V incent, “ Aggregate flexibilit y of thermostati cally controll ed loads, ” P ower Systems, IEEE T ransacti ons on , vol. 30, no. 1, pp. 189–198, Jan 2015. [5] S. K och, J. L. Mathi eu, and D. S. Callaw ay , “Modeling and co ntrol of aggre gated heterogeneo us thermostatic ally control led loads for ancillary service s, ” in P r oc. PSCC , 2011, pp. 1–7. [6] H. Hao, B. Sanandaji, K. Poolla, and T . V incent, “Frequenc y re gulation from flexible loa ds: Potent ial, economics, a nd imple mentatio n, ” in Amer - ican Contr ol Confer ence (ACC), 2014 , June 2014, pp. 65–72. [7] G. Maitre, G. Ba sso, C. Stei ner , D. Gabiou d, and P . Roduit , “Distribute d grid storage by ordinary house heating v ariations: A swiss case study , ” in Digita l System Design (DSD), 2015 Eur omicr o Confere nce on , Aug 2015, pp. 241–249. [8] S. Ihara and F . Schweppe, “Physicall y based modeling of cold load pickup, ” P ower Appar atus and Systems, IEEE T ransact ions on , vol. P AS- 100, no. 9, pp. 4142–4150, Sept 1981. [9] G. A. F . Molina, A. and l. J.A., Implementation and assessment of physical ly based electrica l load models: applicati on to direc t load control resident ial programmes, ” IEE Proceed ings - Gene ration, Transmission and Distrib ution, vol. 150, pp. 61–66(5), J anuary 2003. [10] W . Zhang, J. Lian, C.-Y . Cha ng, and K. Kalsi, “ Aggrega ted modeling and control of air condition ing loads for demand response, ” P ower Systems, IEEE T ransactions on , vol. 28, no. 4, pp. 4655–4664, Nov 2013. [11] K. Schneider , J. Fuller , and D. Chassin, “Multi-stat e load models for distrib ution system analysis, ” P ower Systems, IEEE T ransacti ons on , vol. 26, no. 4, pp. 2425–2433, Nov 2011. [12] S. Koc h, M. Z ima, and G. Andersson, “ Activ e coordi nation of thermal household appl iances for load manag ement purposes, ” in IF AC Sympo- sium on P ower P lants and P ower Systems Contr ol . Cite seer , 2009. [13] S. Bashash and H. Fathy , “Modeling and control of aggregate air conditi oning loads for robust renew able po wer manag ement, ” Contr ol Systems T echnolo gy , IEEE Tr ansaction s on , vol. 21, no. 4, pp. 1318– 1327, July 2013. [14] H. Hao, B. Sanan daji, K. Poolla, and T . V incent , “ A ge neralize d battery model of a col lecti on of th ermostatic ally controlled loads for providi ng ancil lary service, ” in Communication , Contr ol, and Computing (Allerton), 2013 51st A nnual Allerton Confere nce on , Oct 2013, pp. 551–558. [15] B. Sanandaji, T . V incent, and K. Poolla, “Ramping rate flexibil ity of resident ial hv ac lo ads, ” Sustainable E ner gy , IEEE Tr ansactio ns on , vol. PP , no. 99, pp. 1–10, 2015. [16] R. Mortensen and K. Haggerty , “Dynamics of heating and cooling loads: models, simulation , and actual utility data, ” P ower Systems, IEEE T ransactions on , vol. 5, no. 1, pp. 243–249, Feb 1990. [17] PJM, “R TO Regulat ion Signal Data. ” [Online]. A vaila ble: http:/ /www .pjm.com/markets-a nd-operations/ancillary-services.aspx [18] S. Khan, W . Ga wlik, and P . Palen sky , “Reserve cap ability assessment consideri ng correlat ed uncertain ty in microgrid, ” Sustainable E ner gy , IEEE T ransactions on , vol. PP , no. 99, pp. 1–10, 2015.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment