Locating earthquakes with a network of seismic stations via a deep learning method
The accurate and automated determination of earthquake locations is still a challenging endeavor. However, such information is critical for monitoring seismic activity and assessing potential hazards in real time. Recently, a convolutional neural network was applied to detect earthquakes from single-station waveforms and approximately map events across several large surface areas. In this study, we locate 194 earthquakes induced during oil and gas operations in Oklahoma, USA, within an error range of approximately 4.9 km on average to the epicenter and 1.0 km to the depth in catalogs with data from 30 network stations by applying the fully convolutional network. The network is trained by 1,013 historic events, and the output is a 3D volume of the event location probability in the Earth. The trained system requires approximately one hundredth of a second to locate an event without the need for any velocity model or human interference.
💡 Research Summary
The paper presents a novel approach to real‑time earthquake location by leveraging a fully convolutional network (FCN) that ingests raw three‑component waveforms from a regional network of 30 broadband stations in Oklahoma, USA. Traditional hypocenter determination relies on picking P‑wave arrival times, applying a velocity model, and solving an inverse problem—steps that are time‑consuming, require human oversight, and suffer from uncertainties in picks and velocity structures. Recent single‑station CNN methods have shown promise for event detection but only provide coarse surface locations and lack depth information.
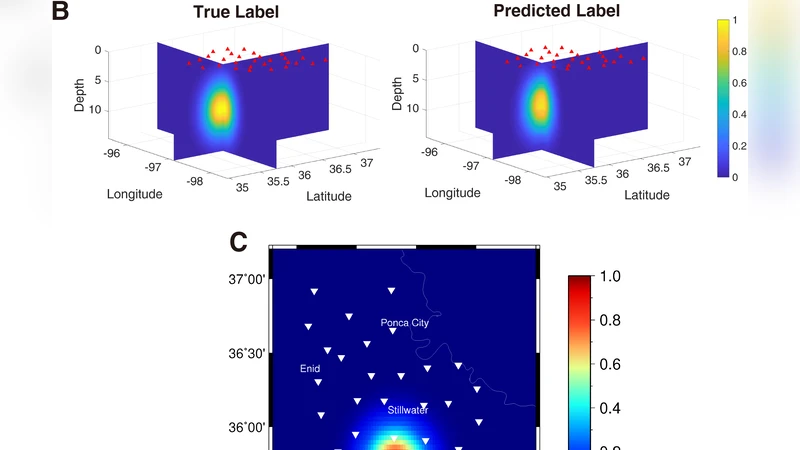
To overcome these limitations, the authors design an FCN that treats the multi‑station waveform record as a three‑dimensional “image” (using an RGB encoding for the three components) and outputs a three‑dimensional probability volume covering the study area (latitude 34.975°–37.493°, longitude –98.405°–95.527°, depth 0–12 km). The output volume is discretized into 80 × 128 × 30 voxels, each representing a candidate source location. Training labels are constructed as three‑dimensional Gaussian functions centered on the catalog hypocenter, with a peak value of 1.0; the Gaussian radius is tuned experimentally to balance localization precision and the number of required training samples.
The network is trained on 1,013 historic earthquakes (Mw 3.0–4.9) recorded between June 2013 and early November 2015. Training runs for 200 epochs with a batch size of four on a GeForce GTX 1070 GPU and converges to near‑zero loss after about ten epochs, completing in roughly three hours. For evaluation, 194 later events (November 2015–March 2016) are fed to the trained model without any preprocessing. The FCN predicts a 3‑D probability image for each event; the voxel with the highest probability is taken as the estimated hypocenter.
Results show an average horizontal error of 4.9 km and an average depth error of 1.0 km relative to the USGS catalog, which is comparable to or slightly better than typical manual locations for this regional scale (≈20 km × 27 km). Importantly, the method processes each event in about 0.01 seconds, enabling fully automated, near‑real‑time operation. The authors demonstrate robustness to noisy or malfunctioning stations by showing that the network still yields accurate locations when one station exhibits large noise.
A systematic study of training‑set size reveals that around 1,000 events are sufficient to achieve the reported accuracy; increasing the number of training samples continues to reduce errors, suggesting that further gains are possible with larger datasets. The authors also discuss false‑positive mitigation: events originating outside the predefined volume produce low peak probabilities (e.g., 0.5 versus >0.9 for in‑volume events), allowing a simple threshold to discard spurious detections.
Finally, the paper explores the potential for early‑warning applications. Tests using only partial waveforms (e.g., the first 5 s) with a model trained on full‑length records result in poor accuracy, indicating that a dedicated training regime with variable time windows is required for reliable early estimates.
In summary, this work demonstrates that a waveform‑based deep‑learning framework can replace conventional arrival‑time inversion for rapid hypocenter estimation, delivering high‑speed, automated, and reasonably accurate locations without explicit velocity models or human intervention. The approach opens avenues for real‑time seismic monitoring and, with further development, could support earthquake early‑warning systems.
Comments & Academic Discussion
Loading comments...
Leave a Comment