Tightening Curves on Surfaces Monotonically with Applications
We prove the first polynomial bound on the number of monotonic homotopy moves required to tighten a collection of closed curves on any compact orientable surface, where the number of crossings in the curve is not allowed to increase at any time during the process. The best known upper bound before was exponential, which can be obtained by combining the algorithm of de Graaf and Schrijver [J. Comb. Theory Ser. B, 1997] together with an exponential upper bound on the number of possible surface maps. To obtain the new upper bound we apply tools from hyperbolic geometry, as well as operations in graph drawing algorithms—the cluster and pipe expansions—to the study of curves on surfaces. As corollaries, we present two efficient algorithms for curves and graphs on surfaces. First, we provide a polynomial-time algorithm to convert any given multicurve on a surface into minimal position. Such an algorithm only existed for single closed curves, and it is known that previous techniques do not generalize to the multicurve case. Second, we provide a polynomial-time algorithm to reduce any $k$-terminal plane graph (and more generally, surface graph) using degree-1 reductions, series-parallel reductions, and $ΔY$-transformations for arbitrary integer $k$. Previous algorithms only existed in the planar setting when $k \le 4$, and all of them rely on extensive case-by-case analysis based on different values of $k$. Our algorithm makes use of the connection between electrical transformations and homotopy moves, and thus solves the problem in a unified fashion.
💡 Research Summary
The paper “Tightening Curves on Surfaces Monotonically with Applications” establishes the first polynomial‑time bound on the number of monotonic homotopy moves needed to tighten any collection of closed curves (a multicurve) on a compact orientable surface while never increasing the number of crossings. Previously, the best known bound was exponential, obtained by combining the de Graaf‑Schrijver monotonic tightening algorithm with an exponential bound on the number of surface maps.
The authors prove that for an n‑vertex multicurve on a surface of genus g with b boundary components, a monotone tightening can be performed using O((g + b) n³) homotopy moves; when the surface has no boundary and is not a torus, the bound improves to O(n⁵·log³g/g² + g n³). The proof proceeds in two main stages. First, they endow the surface with a hyperbolic metric and move the multicurve into a small ε‑neighbourhood of its unique geodesic representative, using only O(n⁵·log³g/g²) monotone moves (Lemma 1.4). The ε‑neighbourhood is chosen so that it does not cover the whole surface, allowing the authors to puncture the uncovered region and reduce the problem to a surface with boundary.
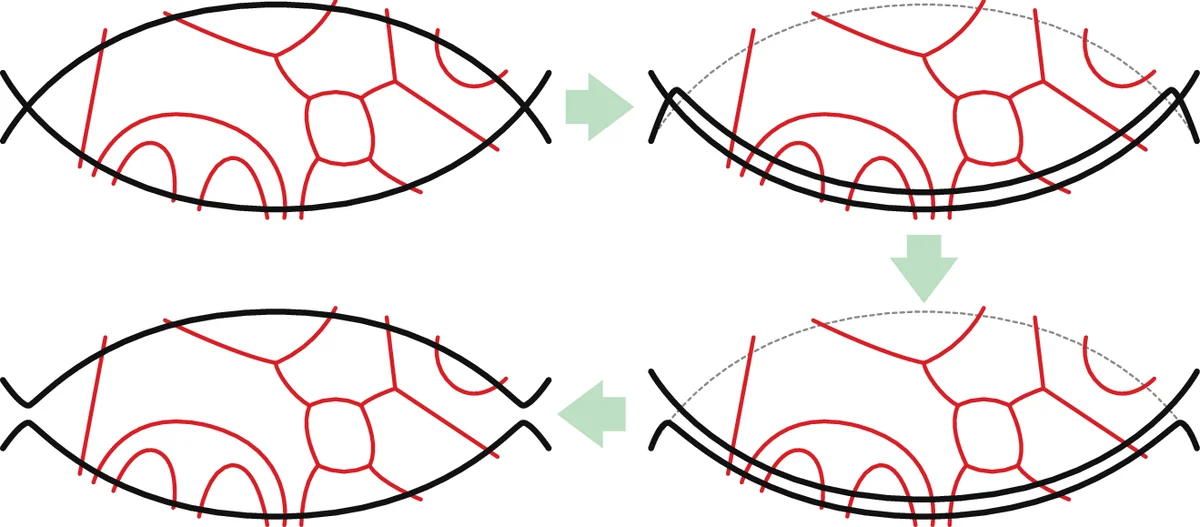
Second, on a surface with boundary, they show that any non‑contractible multicurve can be placed into a “pipe system” – a regular neighbourhood of a one‑dimensional skeleton – using O((g + b) n³) monotone moves (Lemma 1.5). This step adapts the cluster‑ and pipe‑expansion techniques from graph‑drawing literature. Within the pipe system each curve is gradually transformed until it becomes combinatorially close to a power of a primitive curve; at that point the curve can be put into a canonical flat‑braid form. Finally, a known crossing‑minimisation algorithm for flat braids (based on work of Geck and Pfeiffer) is applied to obtain a tight multicurve.
From these technical results the authors derive two algorithmic applications.
-
Minimal‑position computation for multicurves (Theorem 1.2). Using the monotone tightening procedure they give a polynomial‑time algorithm that, given any multicurve on a surface, outputs a homotopic multicurve in minimal position (i.e., with the smallest possible number of intersections). This resolves a long‑standing gap: previous polynomial‑time methods existed only for a single closed curve and relied on finding singular bigons, which do not generalise to multicurves and also break monotonicity.
-
Polynomial‑time electrical reduction of k‑terminal surface graphs (Theorem 1.3). The medial graph of a surface‑embedded graph is a 4‑regular graph whose edges correspond to a multicurve. The authors exploit the known correspondence between electrical transformations (degree‑1 reductions, series‑parallel reductions, Δ‑Y transformations) and the three homotopy moves. Consequently, the polynomial monotone tightening of the medial multicurve translates directly into a polynomial‑time algorithm that reduces any surface graph with an arbitrary number of terminals as far as possible using electrical transformations, while preserving the embedding and never deleting terminals. Prior work handled only constant numbers of terminals (k ≤ 4) and required extensive case analysis; the new method works uniformly for any k.
The paper also treats the torus (genus 1, no boundary) as a special case, providing a separate algorithm that achieves the same goals. Throughout, the authors discuss implementation details, data structures, and the handling of contractible components.
Overall, the work blends hyperbolic geometry, topological curve shortening, and graph‑drawing expansion techniques to obtain a unified, monotone, and combinatorially efficient framework for tightening curves and reducing graphs on surfaces. It opens the door to further extensions such as non‑orientable surfaces, higher‑dimensional analogues, and practical applications in network optimisation, knot theory, and computational topology.
Comments & Academic Discussion
Loading comments...
Leave a Comment