On the Complexity of Constructive Control under Nearly Single-Peaked Preferences
We investigate the complexity of {\sc{Constructive Control by Adding/Deleting Votes}} (CCAV/CCDV) for $r$-approval, Condorcet, Maximin and Copeland$^{\alpha}$ in $k$-axes and $k$-candidates partition single-peaked elections. In general, we prove that CCAV and CCDV for most of the voting correspondences mentioned above are NP-hard even when~$k$ is a very small constant. Exceptions are CCAV and CCDV for Condorcet and CCAV for $r$-approval in $k$-axes single-peaked elections, which we show to be fixed-parameter tractable with respect to~$k$. In addition, we give a polynomial-time algorithm for recognizing $2$-axes elections, resolving an open problem. Our work leads to a number of dichotomy results. To establish an NP-hardness result, we also study a property of $3$-regular bipartite graphs which may be of independent interest. In particular, we prove that for every $3$-regular bipartite graph, there are two linear orders of its vertices such that the two endpoints of every edge are consecutive in at least one of the two orders.
💡 Research Summary
This paper investigates the computational complexity of two classic election‑control problems—Constructive Control by Adding Votes (CCAV) and Constructive Control by Deleting Votes (CCDV)—under several widely studied voting rules (r‑approval, Condorcet, Maximin, and Copeland^α with 0 ≤ α ≤ 1) when the electorate is restricted to nearly single‑peaked domains. Two notions of “nearly single‑peaked” are considered.
-
k‑axes elections: there exist k linear orders (axes) such that every vote is single‑peaked with respect to at least one of them. Equivalently, the set of votes can be partitioned into k groups, each of which is single‑peaked on its own axis.
-
k‑candidates‑partition (k‑CP) elections: the candidate set can be partitioned into k subsets C₁,…,C_k, and for each i the sub‑election induced by C_i is single‑peaked (possibly on a different axis for each i).
The authors systematically study CCAV and CCDV for the four voting correspondences in both models, focusing on the smallest values of k that already make the problems hard. Their main contributions are:
-
Broad NP‑hardness – For almost all combinations, the problems remain NP‑hard even when k is a tiny constant (k = 2 or 3). In particular, r‑approval is NP‑hard for CCAV when r ≥ 4 and for CCDV when r ≥ 3; Condorcet, Maximin, and Copeland^α also become NP‑hard already at k = 2 or 3. This shows that a slight relaxation of the strict single‑peaked condition can dramatically increase computational difficulty.
-
Fixed‑parameter tractability (FPT) exceptions – Two notable positive results are proved:
- In k‑axes elections, CCAV for r‑approval is FPT with respect to the combined parameter k + r. The algorithm exploits two observations: (i) on any axis, the r approved candidates of a vote appear consecutively, and (ii) an optimal solution never needs votes that do not approve the distinguished candidate p. By restricting attention to candidates at most r positions away from p on each axis, the problem reduces to an integer linear program whose number of variables depends only on |B| ≤ k·r, yielding an FPT algorithm.
- Both CCAV and CCDV for the Condorcet rule are FPT with respect to k in k‑axes elections. The Condorcet winner, if it exists, is unique, and the authors design a dynamic‑programming style procedure that enumerates candidate positions across the k axes.
-
Para‑NP‑hardness – For several cases the problems are NP‑hard even for a fixed small k, implying para‑NP‑hardness with respect to the parameter k. For example, CCDV for r‑approval is already NP‑hard when k = 2, and both CCAV and CCDV for Condorcet become para‑NP‑hard in the k‑CP model.
-
Recognition of 2‑axes elections – Prior work left the complexity of deciding whether an election is a 2‑axes election open (k = 1 is polynomial, k ≥ 3 is NP‑hard). The authors present a polynomial‑time algorithm that constructs candidate‑axis assignments or proves none exist, thereby completing the complexity picture for this recognition problem.
-
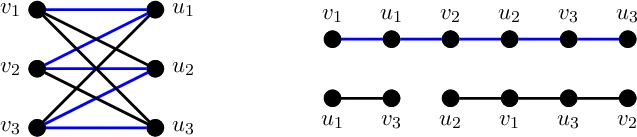
Graph‑theoretic auxiliary result – To prove several NP‑hardness reductions, the paper establishes a new property of 3‑regular bipartite graphs: for any such graph there exist two linear orders of its vertices such that each edge’s endpoints are consecutive in at least one of the orders. This “double‑consecutive ordering” enables the encoding of exact‑cover constraints into vote structures while preserving the near‑single‑peaked property.
The paper also provides a comprehensive dichotomy table summarizing, for each voting rule and each domain (single‑peaked, k‑axes, k‑CP, general), whether CCAV and CCDV are polynomial, FPT, or NP‑hard. The table highlights the stark contrast between the two nearly‑single‑peaked models: some problems that are FPT in the k‑axes setting become para‑NP‑hard in the k‑CP setting, underscoring that the way “nearness” is defined critically influences tractability.
Overall, the work deepens our understanding of how slight relaxations of single‑peakedness affect the feasibility of election manipulation. It shows that while certain control actions remain tractable when the electorate can be covered by a small number of axes, many other actions become intractable even with minimal deviation from perfect single‑peakedness. The polynomial algorithm for 2‑axes recognition and the novel graph ordering theorem are valuable contributions in their own right and may find applications beyond the specific control problems studied here.
Comments & Academic Discussion
Loading comments...
Leave a Comment