Exactly Decoupled Kalman Filtering for Multitarget State Estimation with Sensor Bias
The problem of multisensor multitarget state estimation in the presence of constant but unknown sensor biases is investigated. The classical approach to this problem is to augment the state vector to include the states of all the targets and the sens…
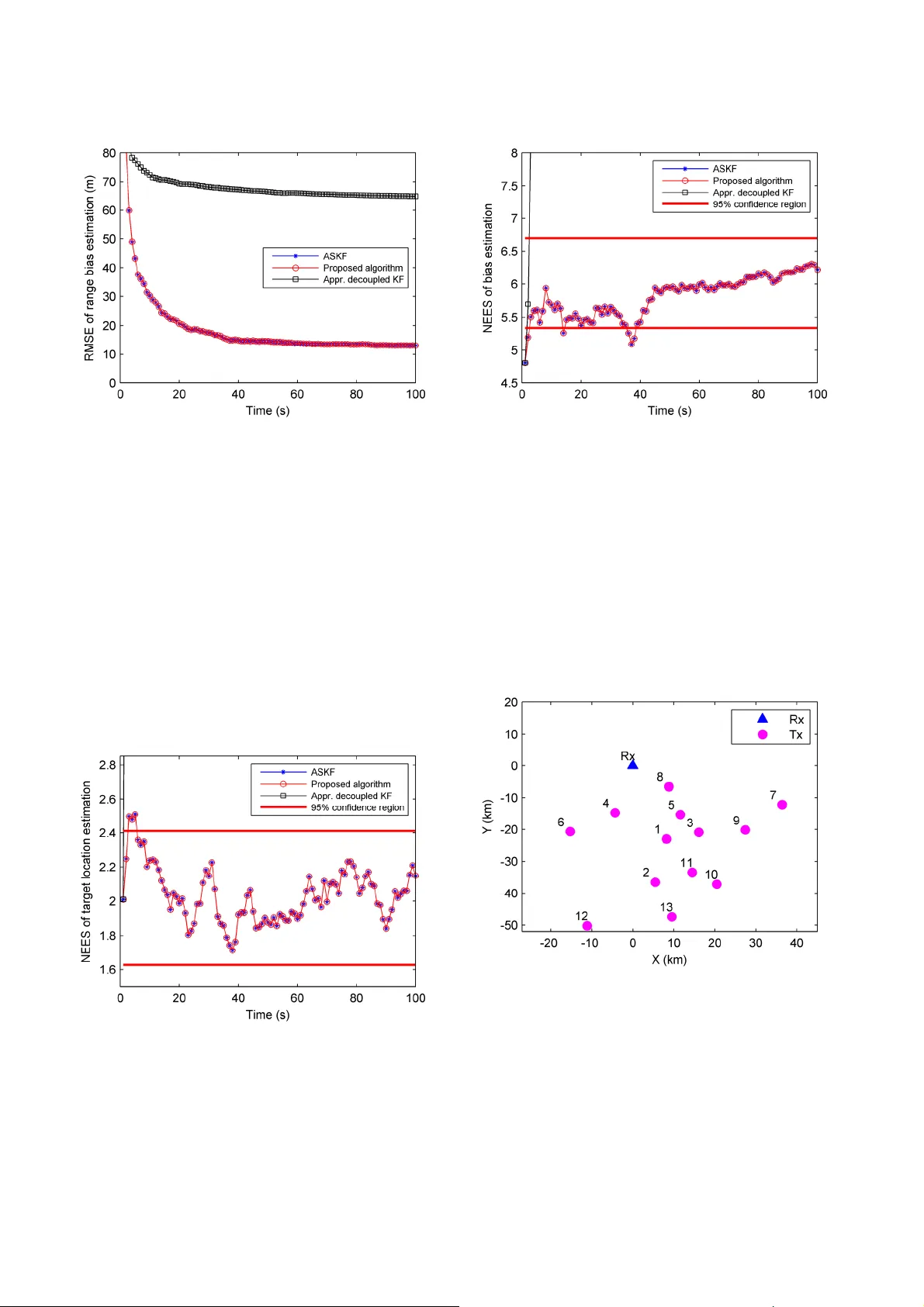
Authors: Jianxin Yi, Xianrong Wan, Deshi Li
0018-9251 (c) 2019 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information. This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TAES.2019.2945092, IEEE Transactions on Aerospace and Electronic Systems 1 Abst ract —The problem of multisensor multitarget state estimation in the presence of constan t but unknown sensor biase s is investigated. The classical approach to this problem is to augment the state vect or to incl ude the states of all the t arge ts and t he s e ns o r b i as e s , a nd t h en i mp l em e n t a n au g me n te d s ta t e K a lm a n filter (AS KF). In t his paper, we propose a novel decoupled Kalm an filtering algorithm. The decoupled Kalman filte ring first proce sse s each t arget in a separate bran ch, namely the single-target Kalm an filtering branch, where the sin gle-target states and the sensor biases are estimated. Then the bias estimate is refined by fusi ng the former bias estimates across all the single-target Kalman filtering branches. Finally, the refined bias estimate is fed b ack to each single-target Kalman filtering branch to improve the targe t state es timat ion. We prove that the proposed decoupled Kalman filtering is exactly equivalent to the ASKF in t e rms of the estimation results under a usua l initial condition. The equival e nce is also confirmed via the numerical example. Moreover, we furth er validate the proposed algorithm using the field experimental da ta of a multistatic passive radar. Index Terms —Decoupled Kalman filt ering, augmented state Kalman filter, multisensor system, multita rget state estimation , sensor bias. I. I NTRODUCTION ULTISENSOR systems attract a great deal of interest in many fields due to the potential to enhance performance by information fusion [1]-[4]. In practice, sensors usually hav e measurements biases. If not corrected, these sensor biases may drastically degrade the fusion performance. Hence bias registration becomes a prerequisite for the information fusion in multisensor systems [5]-[9]. In this paper, we discuss the problem of joint multitarget stat e and sens or bias estimat ion in m ulti sensor system s with a centralized data processing architecture. To focus on the estimation problem, we assume that the data association has been solved in advance. Regar d ing the joint multitarget state and sensor bias estimation, the classical approach is to augmen t the state vector to include the multitarget stat es and the sens or biases, and then implement an augmented state Kalman filter (ASKF) [10]-[13] or other filters based on the augmented state [14], [15]. As the di m ensions of the augmented measurement and augmented state increase in the ASKF, the computational This work was supported in part by the National Natural Sc ience Foundation of China (61701350, 61931015), in part by the Na tional Key R&D Prog ram of China (2016YFB0502403), in part by the T echnologica l Innovation Proj ec t o f Hubei Province of China (2019AAA061), in part by the Postdoctor al Innovation Talent Support Program of China (BX201600117), and i n part by the Fu ndam ental Research Funds for the Centr al Universities (20 42019kf1001). complexity grows sharply with the nu m ber of targets. Moreover, various targets may s tart and end at different time. It leads t o the f requent change of the augmented-state vector, which is not convenient for implementation. Thus, this classical structure i s not flexible. A practical implementation prefers decoupled processing. To narrow the scope of discussion, in this paper we investigate the m ethod under the classical Kalman filtering (KF ) framework as it is widely used in many systems. Regarding the corresponding decoupled processing, a two-stage approach was proposed in [1 6] and generalized in [17]-[19] by formulating the original ASKF into two pa rallel, reduced-order filters. Fir st, it does bias-ignorant esti m ation for the multitarget states as if there is no bias. Th en biases are obtained f rom the bias-ignora nt estimates. The corrected target states are obtained as a linear combination of the bias-ignorant est imates and the bias estimates. This two-stage approach could be equivalent to the ASKF under certain conditions. However, its structure is still complicated in the m ultitarget case. When the target number changes, the filter also needs to be adjusted frequently an d substantially. The ASKF approach has also been discussed in [20]. Two approximately decoupled methods were proposed by simplifying the cross-correlation between target states and biases. The f irst m ethod na m ed macro filter has nearly optimal performance but also has a complex structur e, thereby facing the flexibility problem mentioned above. The second method (called approximately decoupled KF hereafter) directly ignores the cross-correlation and then processes the tar get states and biases separately. It is computationally efficient but with obvious performance degradation. Another decoupled filter for the bias estimation was proposed in [21 ]. The bias estimation is separated f rom the model vi a a series of algebraic operations. It is an ad hoc algorithm that only outputs the bias estim ate and no target sta te estimate. A partitioned KF for oceanic and atmospheric data assimilation is proposed in [22]. The intention therein is to tack le th e hig h-dim ension al fil terin g pro blem . It ap proxim ates the mod el state by a sum o f a series of independent ele ments. Another type of partitioned (or compressed) KF is discussed in [23] and [24]. It solv es the problem where t he m easurement and the state transition models are decoupled between substates in a time interval but the initial esti m ates of the substates are not J. Yi, X. Wan, and D. Li are with the Scho ol of Electronic Info rmation, Wuhan University, and also w ith the Collaborative Innovation Center f or Geospatial Technology, Wuhan, China. (corre sponding author: Jia nxin Yi, e- mail: jxyi@whu.edu.cn) Exactly Decoupled Kalman Filtering for Multitarget State Estimation with Sensor Bias Jianxin Yi, Member , IEEE , Xianron g Wan, De shi Li M 0018-9251 (c) 2019 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information. This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TAES.2019.2945092, IEEE Transactions on Aerospace and Electronic Systems 2 independent. F o r the multitarget state esti m ation with sensor biases herein, the sensor biases are coupled with all the targe ts in the measuremen t models. It does not meet the applicable condition of the partitioned KF in [22]- [24]. In this paper, our objectiv e is to find a decoupled method that is equivalent to th e ASKF and has a clear and flexible structur e. To this end, we decoup le the ASKF by taking each target as a basic unit. Fir st , the states of one target and the sensor bias es are jointly est im ated in each single-target KF branch. The sensor bi as estimate is then refined by fu sing across all the single-target KF branches. Finally, the refined sensor bias estimate is fed back to each single-target KF b ranch to improve the state estimation. This novel decoupled KF can readily h a n d l e t h e c a s e w it h a d y n a m i c c h a n g e o f t h e n u m b e r o f t a r g e t s . It also has lower computational complexity than the ASKF. Moreover, we prove that the proposed decoupled KF is exactl y equivalent to the ASKF in t erms of the estimation results u nder a usual initial condition. The proposed decoupled KF is further validated in the context o f multistatic radars using both simulated and field experimental data. The rest of th e paper is organized as follows. Section I I introduces the syste m model and the ASKF. Section III elaborates the proposed decoupled KF. Section IV proves the equivalence between the prop osed decoupled KF and the A SKF. Simulations and real data evaluations are presented in Section V. Finally, conclusio ns are drawn in Section VI. II. P ROBLEM S TATEMENT A. Notations The following notations are used in this paper. t n x state vector of the n th target N number of targets b sens or bias vector n x augmented state vector including t n x and b , i.e. TT T t [, ] n xb x augmented state vector including t ,1 , , n nN x and b , i.e. 1 TT T T tt [, , , ] N xx b n z measurement vector of the n th target z augmented m easurement, i.e. TT T 1 [, , ] N z z t n F state transition matrix of the n th target t n v proc ess noi se of t he n th target t n Q covariance matrix of t n v t n H state measurement matrix b n H bias measurement matrix n w measurement noise of n z n R covariance matrix of n w * ˆ x a ugmented state estimate i n the ASKF ** t ˆ ˆ , n xb subvectors of * ˆ x * P covariance matrix of * ˆ x ** * * tt t bb ,, , nm n n PP P P subm atrices of * P ˆ n x ou tput esti m ate of the aug m ented s tate estimation module in the proposed decoupled KF t ˆ ˆ , n n xb subvectors of ˆ n x n P covariance matrix of ˆ n x tt bb ,, nn n PP P submatrices of n P f ˆ b fused bias vect or estimate after the bias infor mation fusion i n the pr oposed decoupled KF fb P covariance matrix of f ˆ b f ˆ n x updated esti m ate after the augmented state update in the proposed decoupled KF ft ˆ n x subvector of f ˆ n x f n P covariance matrix of f ˆ n x ft ftb , nn PP submatrices of f n P * fb ,, n PP P one-step prediction covariance matrices of * fb ,, n PP P *1 *1 *1 *1 tt t bb [] , [] , [] , [] nm n n PP P P submatrices of *1 P 11 1 tt bb [] , [] , [] nn n PP P sub m atrices of 1 n P I identity matrix O all-zero matrix 0 all-zero vector B. System Model W e s ta rt wi t h l i ne ar st a te an d me as ur e me nt mo d el s. T he ca s e of nonlinear models will be discussed in Section IV. Suppose that there are N targets. For the n th target, the state vector at time k is denoted as t () n k x . The state equation of the n th target can be expressed as tt t t (1 ) ( ) ( ) ( ) . nn n n kk k k xF x v ( 1 ) t () n k F is the stat e transition matrix. The process noise t () n k v is assumed to be a zero-mean white Gaussian noise with covariance t () n k Q , namely tt () , () nn kk v0 Q and T tt t () ( ) () nn n kl Ek l k vv Q with 1, 0, kl kl kl . 0 is the all- zero colum n vector with corresponding size . E denotes the statistical expectation, and superscr i pt “T” denotes the transpose. Here the process noises of different targets are assumed to be statistically independent, namely T tt t () () () nm n nm Ek k k vv Q . Assume that the sensor biases are constant bu t unknown and only affect the measurements in the form of summation. Then the bias vector b conforms to (1 ) ( ) . kk bb b ( 2 ) The measurement model of the multisensor syste m with respect to the n th target is expressed as tt b () () () () () . nn n nn kk k k k zH x H b w ( 3 ) 0018-9251 (c) 2019 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information. This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TAES.2019.2945092, IEEE Transactions on Aerospace and Electronic Systems 3 For the multisensor case, () n k z stacks the m easurements of all the sensors with respect to t he n th target. t () n k H , b () n k H , a nd () n k w denotes t he state measurement m atrix, bias measurement matrix, and m easurement noise, respectivel y. It is assum ed that () , () nn kk w0 R , T () () () nm n n m Ek k k ww R , T () ( ) () nn n k l Ek l k ww R , and T t (1 ) ( ) m n Ek l wv O . O is the all-zero m atrix with corresponding size. Besides, it is assu m ed that the cou n terpart deterministic system o f (1)-(3), namely the counterpart sy stem without the process noise and measurem ent noise, is observable 1 . It indicates that the observability matrix composed of t () n k H , b () n k H , and t () n k F , 1, 2 , k , has full column rank [25]. Under the observability assumption, the state est imator, e.g. t he KF, can then be applied. In the following text, for description brevity, the time index in the t () n k F , t () n k v , t () n k Q , t () n k H , b () n k H , () n k w , and () n k R will be omitted in the case of no ambiguity. C. Augmented State Kalman Filter In t h e A S KF , t he au gm ent e d s ta t e st a ck s t h e s t at e s o f a ll t he targets and the sensor biases into a single v ector, denoted by 1 TT T T tt [, , , ] N xx x b . The state equation of th e augmented state x is expressed as (1 ) ( ) ( )( ) . kk k k xF x v ( 4 ) 1 tt b lkdiag { , , , } N FF F I , where b lkdiag denotes block diagonal m atrix constructed by th e matrices in the brace and I is the i dentity m atrix with appropriate size. 1 TT T T tt [, , , ] N vv v 0 . The covariance m atrix o f v becomes 1 tt b lkdiag{ , , , } N QQ Q O . Likewise, stacking the measurements of all the targets into a single vector , denot ed by TT T 1 [, , ] N z zz , the aug m ented measurement equation can b e expressed as () () () () , kk k k z Hx w ( 5 ) where H conform s to 11 tb tb . NN HO H H OH H ( 6 ) TT T 1 [, , ] N ww w . The covariance matrix of w becomes 1 b lkdiag{ , , } N RR R . Given the augmented state and measurement models in (4) and (5), the ASKF can be ex pressed as follows ** ˆ ˆ (1 | ) ( ) ( | ) , kk k k k xF x ( 7 ) ** T (1 | ) ( ) ( | ) ( ) ( ) , kk k k k k k PF P F Q ( 8 ) *T 1 *T (1 ) ( 1 | ) (1 ) (1 ) (1 | ) ( 1 ) (1 ) , kk k k kk k k k KP H HP H R (9) 1 Strictly speaking, the models ( 1)- (3) constitute a linear s toc hastic system. Regarding the stochastic obser vability, there are various defin itions. One can referring to [26]-[29] and t he references therein. ** * ˆˆ (1 | 1 ) (1 | ) ˆ (1 ) (1 ) (1 ) (1 | ) , kk kk kk kk k xx Kz H x (10) ** ( 1 | 1) ( 1) ( k 1) ( 1 | ) . kk k kk PI K H P (11) Note that superscript “*” has used to denote the es t imate and covariance matrix of the ASKF. Besides, there is an equivalent information f orm of (10) and (11), i.e. *1 * *1 * T 1 ˆ (1 | 1 ) (1 | 1 ) ˆ (1 | ) (1 | ) (1 ) ( 1 ) (1 ) , kk kk kk kk k k k Px Px H R z (12) *1 * 1 T1 (1 | 1 ) (1 | ) (1 ) (1 ) (1 ) . kk kk kk k PP HR H (13) This information form of the KF is used hereafter to facilitate the following proofs. III. P ROPOSED D ECOUPLED K ALMAN F ILTER ING A. Algorithm Description Instead of p rocessing the multitarget s tates and sensor biases together as in the ASKF, a decoupled KF that deals with each target separately is proposed herein. A single-target KF branch is assigned for each t arget. The b lock diagram of the decoupl ed KF is presented in Fig. 1. There are three m ain modul es, namely the augmented state estimation, bias inf ormation fusion, an d augmented state update. First, the augm ented state esti m ation i s conducted for each single-target KF branch. The bias vector estimates o f all the single-target KF branches are fused in the module of bias information fusion. The fused bias ve ctor estimate is t hen fed back to each single-target KF branch to refine the state estim ation. The augm ented state herein is different from that of the ASKF in Section II-C. It is only constructed by the states of a single target and the sensor biases. Let TT T t [, ] n n xx b be the augm ented state of th e n th single-target KF branch. The corresponding state equation is expressed as (1 ) ( ) ( ) ( ) , nn n n kk k k xF x v (14) where t b lkdiag { , } n F FI , and TT T t [, ] n n vv 0 . The covariance of n v becomes t b lkdiag{ , } n n QQ O . The corresponding measurement equ ation is given in (3) an d rewritten here for convenience, i.e. () () () () , nn n n kk k k zH x w (15) where tb [, ] nn n HH H . Let f ˆ (|) n kk x be the updated state of the n th single-target KF branch after the module of au gm ented state update and f (|) n kk P be the covariance mat rix of f ˆ (|) n kk x . 1) Augme nted state estimati on Applying the KF to m odel (14) and (15), the augmented state estimation in each single-target KF branch is exp ressed as f ˆ ˆ (1 | ) ( ) ( | ) , n nn kk k k k xF x (16) T f (1 | ) ( ) ( | ) ( ) ( ) , n nn n kk k k k k k PF P F Q (17) 0018-9251 (c) 2019 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information. This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TAES.2019.2945092, IEEE Transactions on Aerospace and Electronic Systems 4 T 1 T (1 ) (1 | ) (1 ) (1 ) (1 | ) (1 ) (1 ) , nn n nn n n kk k k kk k k k KP H HP H R ( 1 8) ˆˆ (1 | 1 ) (1 | ) ˆ (1 ) (1 ) (1 ) (1 | ) , nn nn n n kk kk kk k k k xx Kz H x (19) (1 | 1 ) (1 ) ( k 1 ) (1 | ) . nn n n kk k kk PI K H P ( 2 0 ) Likewise, the information form of (19) and (20) is 1 1T 1 ˆ (1 | 1 ) (1 | 1 ) ˆ (1 | ) (1 | ) (1 ) (1 ) (1 ) , nn nn n n n kk kk kk kk k k k Px Px H R z (21) 11 T1 (1 | 1 ) ( 1 | ) (1 ) (1 ) (1 ) . nn nn n kk kk kk k PP HR H (22) Fig. 1. The block diagram of the deco upled KF. 2) Bias information fusion Partitioning ˆ n x and n P according to the target s tates and sensor biases, we have t ˆ ˆ ˆ n n n x x b and tt b T tb b nn nn n PP P PP . For N targets, there are N separate estimates of the sensor bias vector, namely ˆ n b , 1, , nN . In this module, we fu se all the separate bias vector es tim ates. Let f ˆ b be the fused bias vector estimate a nd fb P be the covariance matrix of f ˆ b . The bias information fusion is implement ed as follows ff ˆˆ (1 | ) ( | ) , kk k k bb (23) fb fb (1 | ) ( | ) , kk k k PP (24) 1 ff b f b f 1 b 1 1 b ˆˆ ( 1 | 1 ) ( 1 | 1 ) ( 1 |) ( 1 |) ˆ (1 | 1 ) (1 | 1 ) ˆ ( 1 |) ( 1 |) , n n N n n n kk kk kk kk kk kk kk kk bP P b Pb Pb (25) 11 fb fb 11 bb 1 (1 | 1 ) (1 | ) (1 | 1 ) (1 | ) . nn N n kk kk kk kk PP PP (26) 3) Augmented st ate update In this m odule, the augm ented state of the each single-target KF branch is updated by apply ing the fused bias vector estimate . It is im plem ented as fol lows 1 1 ft tb b f tt b b f f f f f ˆ ˆ ˆˆ ˆ ˆ () () ˆ ˆ (1 | 1 ) , ˆ ˆ ˆ ˆ n nn nn n n n n n n kk x PP b b xP P b b xx b bb b (27) 11 T 1 11 T 1 ft ftb tb b b fb b tb tb b b fb t t b b b fb b tb tb b fb f T 1T 1T ftb fb b fb b tb b fb fb b tb fb () ( ) () (1 | 1 ) , () nn nn n n n nn n n nn n n n nn n n nn n n n n n kk PP PP P P PP PP P P P PP P P PP PPP PP PP PP P P PP P P P P (28) where the time indices (1 | 1 ) kk of al l the quantities in the right side of eq ual signs in (27) and (28) hav e been omitted to simplify the notation. Note that the updated bias vector estimate and its covariance matrix are equal to that o f th e fused bias vector estimate. In addition, applying the matrix inversion formula in block form (called block matrix inversion formula hereafter) [ 30], eq. (28 ) can be equivalently expressed in th e form of in fo rmation m atrix , i.e. 11 11 f fb b . n nn OO PP OP P (29) The derivation of (29) is detailed in the Appendix A. Note that only the bias submatrix of the inf ormation matrix changes afte r the aug m ented state update. It is consistent with the intuition that only the bias information is fed back for the update. B. Computational Complexity In the proposed decoupled KF , only the bias vector estimates 0018-9251 (c) 2019 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information. This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TAES.2019.2945092, IEEE Transactions on Aerospace and Electronic Systems 5 and covariance matrices are needed to be transferred between the single-target KF branches and the bias infor m ation fusion module. This structure is very clear and flexible. Moreover, in this subsection, we will show that the proposed algorithm has lower computational complexity than th e ASKF. The number o f multiplications required for one data update is adopted as a measu re of comput ation al complexit y. Let S , B , and M be the dimensions of t n x , b , and n z , respectively. Table I and II summarize the co m putational complexity of the ASKF and proposed decoupled KF, respectively. The computational complexity of the proposed decoupled KF is l i n e a r w i t h t h e n u m b e r o f t a r g e ts , a n d i t i s t w o o r d e r s l o we r t han that of the ASKF. TABLE I Computational complexity of the ASKF in term o f multiplications required for one data update Processing Steps Multiplications ** ˆ ˆ (1 | ) ( | ) kk k k xF x 2 1 CN S ** T (|) kk P FP F Q 2 2 2( ) CN S N S B 1 *T *T K PH H PH R 33 22 3 22 2 2 22 2 2 () ( ) 2 2 22 CO M N M N N S B MN S M N S MN SB M N B MNSB MNB ** * ˆˆ (1 | ) ˆ (1 | ) kk kk xx Kz H x 4 (2 ) CM N N S S B ** () ( 1 | ) kk PI K H P 22 2 5 22 () CM N N S B M N S M N SB MNSB MNB Total Complexity 12 34 5 C C CCCC Items of the high est order 33 22 2 ( ) () () OM N M N N S B M N N S B Note: Fo r fair comparison, the special structure o f F and H has been considered in the statistics. 33 () OM N denotes the computational complexity of the invers ion of a matrix with size M NM N . TABLE II Computational complexity of the proposed decoupled KF in term o f multiplications required f or one data update Processing Steps Multiplications Augmented state estimation for a single-targ et KF branch 32 2 1 32 () 2( ) 3 ( ) 3 () 2 () () CO M M S B M S B SB M SB SB Repeat N times 21 CN C Bias information fusion 32 3 (2 2) ( ) (2 2 ) CN O B N B Augmented state update for a single-target KF branch 22 4 3 CS BS BS B Repeat N times 54 CN C Total Complexity 235 CCC C Items of the high est order 32 2 32 2 3 [( ) 2 ( ) 3 ( ) 3( ) 3 ] ( 2 2 ) ( ) NO M M S B M S B SB S B S B N O B IV. P ROOF OF E QUIVAL ENCE B ETWEE N P ROPO SED D ECOUPLED KF AND ASKF A. Proof of Equivalence Between Proposed Decoupled KF and ASKF Let the initial state of t he ASKF be 1 *T T T T tt ˆ ˆ ˆˆ (0) [ (0), , (0), (0)] , N xx x b (30) and the corresponding covariance matrix be tt t b * T tt t b TT tb tb b (0) (0) ( 0) (0) , (0) (0) (0) (0) (0) (0) mm n m mn n n mn PP P P PP P PP P (31) where t mn P denotes the cross-co variance matrix between the m th and n th targets’ s tates, and tb n P denotes the cross - covariance matrix between the n th target’s states and sensor biases. We use b (0) P to represent the initial uncertainty of the sensor biases. Under the framework of KF, the sensor biases are also treated as Gaussian random variables alth ough they are assumed to be unknown constant in th e model. Likewise, let the initial states of the decoupled KF be TT T ft ˆ ˆ ˆ (0) [ (0) , (0) ] , 1 , , , nn nN xx b (32) f ˆˆ (0) (0) , bb (33) and the corresponding covariance matrices be tt b f T tb b (0) (0) (0) , 1 , , , (0) (0) nn n n nN PP P PP (34) fb b (0) (0). PP (35) Note that it is natural to set the same initial states and covariance matrix f or the A SKF and the decoupled KF. To prove the equivalence between the proposed decoupled KF and the ASKF, we first prove the following lemma. I n the following lemma, theorem, a nd proofs, to simplify th e notation, the time index (1 | 1 ) kk is omitted in the case of no ambiguity, e.g. ** (1 | 1 ) kk PP , and the time index (1 | ) kk in the covariance matrix is replaced by a transverse line on the top o f the symbol, e.g . ** (1 | ) kk PP . Lemma : Un der the model (1)-(3) and the initialization (30)- (35), if 1T tt b b t b (0) (0) (0 ) (0) mn m n PP P P , ,1 , , mn N , then ** * 1 * T tt b b t b (|) (|) (|) (| ) mn m n kk kk kk kk PP P P , ,1 , , , 0 mn N k . Proof: We propose an inductive proof. A ccording to the condition of the le mm a, we obtain that ** * 1 * T tt b b t b (|) (|) (|) (| ) mn m n kk kk kk kk PP P P , , mn holds when 0 k . Thus, we only need to prove that ** * 1 * T tt b b t b mn m n PP P P , , mn for the time index (1 | 1 ) kk also holds if ** * 1 * T tt b b t b (|) (|) (|) (| ) mn m n kk kk kk kk PP P P , , mn . Without loss of generality, we first take the case of 2 targets for the p roof. In this case, we partition all the covariance ma trix according to the states of each target and the sensor biases. F or example, * (|) kk P , * P , *1 P , and * P can be expressed in the block matrix form 0018-9251 (c) 2019 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information. This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TAES.2019.2945092, IEEE Transactions on Aerospace and Electronic Systems 6 11 2 1 12 2 2 12 ** * tt t b ** T * * tt t b *T * T * tb tb b (| ) (| ) (| ) (| ) (|) (| ) (|) , (|) (|) (|) kk kk kk kk kk kk kk kk kk kk PP P PP P P PP P (36) 11 2 1 12 2 2 12 ** * tt t b ** T * * tt t b *T *T * tb tb b , PP P PP P P PP P (37) 11 2 1 12 2 2 12 *1 *1 *1 tt t b *1 *1 T *1 *1 tt t b *1 T *1 T *1 tb tb b [] [][] [] [] [] , [] [] [] PP P PP P P PP P (38) 11 2 1 12 2 2 12 ** * tt t b ** T * * tt t b *T *T * tb tb b , PP P PP P P PP P (39) where submatrices with subs cripts “ 1 t ”, “ 2 t ” , a n d “ b ” denote the covariance submatrices co rresponding to target 1, target 2, and bias vector, respectively. The submatrix with subscript “ 12 t ” denotes the cross- covariance sub m atrix between the states of target 1 and target 2. The sub m atrix with subscript “ tb n ” ( 1, 2 n ) denotes the cross-covariance submatrix between the states of target n and the bias vector. *1 P represents the corresponding information matrix of * P . Substituting (36) into (8), ** (1 | ) kk PP conforms to 11 1 1 11 2 2 1 1 21 2 1 2 2 2 2 2 2 11 22 *T * T * tt t t tt t tt b ** T T * T * tt t tt t t tt b *T T *T T * tb t tb t b (|) (|) (|) (|) (| ) (|) . (|) (|) (| ) kk kk kk kk kk kk kk kk kk FP F Q FP F FP P FP F FP F Q FP PF PF P (40) According to 12 1 2 ** * 1 * T tt b b t b (| ) (|) (|) (|) kk kk kk kk PP P P , i t can be readily verified in * P that 12 1 2 ** * 1 * T tt b b t b . PP P P (41) Applying the block matrix inversion formula to (37) and making it correspond to (38), we obtain 11 1 11 2 1 1 2 1 12 12 2 12 2 2 22 2 1 1 ** * 1 * T *1 *1 * * * tt b b t b ttt t t b * 1 *T *T bt bt b *1 T *1 * T * * 1 ** * 1 * T tt t t t b tt b b t b [] [] , [][ ] PP P P O PP P P P PP P PP P P P OP P P P (42) 11 1 1 1 2 22 2 2 1 ** * 1 * T * * 1 *1 t tb b tb tb b tb *1 1 ** * 1 * T * * 1 tb tt b b t b t b b [] , [] PP P P P P P P PP P P P P (4 3) 11 2 1 1 12 12 12 2 2 2 11 1 1 1 2 1 ** * * t t tb tb * 1 * 1 * 1 *T *T * 1 *T *T * 1 bb b t b t b b t b t b b *T * * * t t tb tb 1 *1 *1 * T * * *1 * T * *1 *1 * T b b tb t tb b tb tb b b tb [] PP P P PP P P P P P P P PP P P PP P P P P P P PP P 22 2 2 1 ** * 1 * T * * 1 t tb b tb tb b , PP P P P P (44) where (41) has been appli ed in (42). According to (42), there i s 12 *1 t [] PO . *1 P can be expressed as 11 22 12 *1 *1 tt b *1 *1 *1 tt b *1 T *1 T *1 tb tb b [] [] [] [] . [] [] [] PO P PO P P PP P (45) Further substituting (45) into (13), we obtain 11 1 11 1 22 2 22 2 11 1 2 2 2 1 1 2 2 * 1 T1 * 1 T1 tt 1 t t b t 1 b *1 *1 T 1 *1 T 1 *1 T 1 tt 2 t t bt 2 b *1 T T 1 *1 T T 1 *1 T 1 T 1 tb b 1 t tb b 2 t b b 1 b b 2 b [] [] [] [] . [] [] [] PH R H O P H R H P P H RH O P H RH P H RH P HRH P H RH P HRH H RH (46) Applying the block matrix inversion formula to (39) and making it correspond to (46), we obtain 11 2 1 1 1 1 12 12 2 2 22 2 1 ** * * 1 T 1 tt t b t t 1 t * 1 *T *T bt b t b *T * * *1 T 1 tt t b tt 2 t [] , [] PP P P H R H O PP P PP P O P H R H (47) 0018-9251 (c) 2019 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information. This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TAES.2019.2945092, IEEE Transactions on Aerospace and Electronic Systems 7 11 1 1 11 1 22 2 2 22 2 *1 T 1 * *1 T 1 t t 1 t tb tb t 1 b *1 b *1 T 1 * *1 T 1 t t 2 t tb tb t 2 b [] [] . [] [] P H RH O P P H RH P OP H R H P P H R H (48) Expanding (47) , we get 1 ** * 1 * T * 1 T 1 tt b b t b t t t [] , 1 , 2 , nn n n n n n n PP P P P H R H (49) 12 1 2 ** * 1 * T tt b b t b . PP P P O (50) Eq. (50) is the desired result of the lemma. In addition, it is easy to verify that the above derivations ca n be extended to the case of N targets ( 2 N ). The general processes are as follows. First, according to ** * 1 * T tt b b t b (|) (|) (|) (| ) mn m n kk kk kk kk PP P P , , mn , we can obtain ** * 1 * T tt b b t b mn m n PP P P , , mn , as in (41). Then trea ting the states of all the target as a block and applying the block matr ix inversion for m ula, we can get a block diago nal matrix for the target state in formation sub m atrix as in ( 42). With the block diagonal target state information submatrix, w e can f urther obtain the desired res ult of the lemma by following the processes as in (46)-(50). In summ ary, the lemma is proved. Now we prove the equivalence between the proposed decoupled KF and the ASKF. It is expressed as the following theore m. Theorem : Under the model (1)-(3), the initialization (30) - (35), and the i ni tial condition 1T tt b b t b (0) (0) (0) (0) mn m n PP P P , ,1 , , mn N , the prop osed de coupled KF is equivale nt to the ASKF. Proof: Appendix B gives the detailed proof of the theorem when 2 N . It is an inductive proof. The core is to p rove that * ft t ˆ ˆ nn xx , * f ˆˆ bb , * ft t nn PP , * ftb tb nn PP , * fb b PP , 1, 2 n , holds if * ft t ˆ ˆ (| ) (|) nn kk kk xx , * f ˆˆ (|) (|) kk kk bb , * ft t (|) (|) nn kk kk PP , * ftb tb (|) (|) nn kk kk PP , * fb b (| ) (| ) kk kk PP , 1, 2 n . T o this end, we first prove * fb b PP by comparing 1 fb P with *1 b P . It involves a series of formula expansions and block matrix inversions. Then based on * fb b PP , we furthe r prove * f ˆˆ bb and * ft t ˆ ˆ nn xx . Finally, we prove * ft t nn PP and * ftb tb nn PP . In addition, it is easy to ext end the pro of to the case of 2 N . T h a t i s , w e c a n t r e a t a l l t h e N targets as a super tar g et. Then applying the proof to the supe r target and the (1 ) t h N target, we can prove the theorem for the case of 1 N targets. Thus, the theorem is proved. B. Discussions In the proo f s, note that there is an important feature in the infor mation matrix *1 P and *1 P , namel y *1 *1 tt [] [] mn mn PO P . T he zer o cross -informati on m atri x between targets lays the foundation for an exactly or equivalently decoupled implemen tation. The initial condition 1T tt b b t b (0) (0) (0 ) (0) mn m n PP P P , ,1 , , mn N , plays an important role in guaranteeing the zero cross-inf ormation m atrix b etween targets. It should be highlighted that 1T tt b b t b (0) (0) (0) (0) mn m n PP P P is usually satisfied. For example, in the initialization, both the measurement noise (0) n w and the uncertainty of sensor biases ˆ (0) (0) (0) bb b are unknown factors in the measurement. For the initial state estimation, an alternative ap proach may treat these two unknown f actors as the composite measurem ent noise, na m ely b (0) (0) n n wH b . By linearization, the initial state estimation error o f the targ et, denoted as tt t ˆ (0) (0) (0) nn n xx x , can be expressed as tb (0) [ (0) (0)] nn nn xG w H b , where n G denotes the gain matrix. A ssuming that the uncertainty of sensor biases is independent of the measurement noise, w e can obtain tb b b (0) (0) , nn n PG H P (51) TT 1 T tb b b t b b t b (0) (0) (0) (0) (0) , mn m n m n mn PG H P H G P P P (52) where (51) has been applied in (52). Eq. (52) satisfies the required initial condition. Another underlying condition to ensure the zero cross- information matrix between targets is the constant sens o r bias model. It is the case for many applications. For the time-varyi ng sensor biases, there is nonzero cross-information matrix between targets. The le mma would not exactly hold. The proposed decoupled KF beco m es an app roximation to the ASKF. In addition, the above theorem and proof are based on the linear state and measurement models. For the nonl inear m odels, if ex tended Kalman filter (EKF) is ap plied to both the proposed decoupled KF and the ASKF, the equivalence between th ese two approaches can also be proved. It is interesting to find that the bias fusion formulas (25) an d (26) are quite s imil ar to the fusion equations of the optimal distributed estimation in [31]. The application scenario of the optimal distributed estimation in [31] is that each sensor gets an estimate of the same target’s states. The problem therein is to fuse these distributed state estimates to get a better state estimate. The proble m discussed in this paper is different. The intuitive difference is that the bias vector estimates herein a re separated according to targets, not sensors. Moreover, the bias vector estimates to be fused are only a part of the augmented state in each single-target KF branch. The proble m herein is more c omplica ted. V. S IMULATION AND F IELD E XPERIMENT AL R ESULTS In this section, sim ulations ar e first con ducted in the context of multistatic r adars to verify the theoretical development and to compare the performance of the proposed a lgorithm with t hat of the ASKF and the approximately decoupled KF in [20]. The proposed algorithm is then applied to real data of a multistati c passive radar to test the practical feasibility. 0018-9251 (c) 2019 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information. This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TAES.2019.2945092, IEEE Transactions on Aerospace and Electronic Systems 8 A. Simulations The simulation scenario is shown in Fig. 2. T wo-dim ensional (2-D) space is considered in the si m ulation. There are 5 transmitters, 1 receiver, and 3 targets. Each transmitter-receiver (bistatic) pair co m poses a sensor. All the target trajectories continue 100 s. The data refresh period is 1 s. The target sta t es are generated according to t he Wiener-sequence acceleration model [ 32]. We enable all the bistatic pairs to detect all the targets to facilitate the execution of the ASKF. The data association is assumed to be known a priori. In the simulation, the measurement consists of bistatic range and bistatic velocity. The bistatic range is the sum of the transmitter-to-target rang e and target-to-receiver range, n amel y tr 2 2 rs rs , where r , t s , and r s denote the locations of the target, trans m itter, and r eceiv er, r esp ectively, and 2 denotes the Euclidean norm. The bi static velocity is the rate of the bistatic range (r elated to t he bistatic Doppler frequency). I t can be expressed as T tt rr 2 2 [( ) ( ) ] vsrsr srs r , where v is the velocity of the target. Without loss of generality, only bistat i c range biases are inser t ed. In each Monte-Carlo (MC) simulation, the bistatic range biases are generated according to zero-mean Gaussian distribu tion with standard deviation 300 m and are maintained constant over the 100 s. The measurement noises of the bistatic range and bis tatic velocity f ollow the independent and id entically distributed (II D) zero-mean Gaussian distribution with standar d deviation 30 m and 1.5 m/s, respectively. 1 00 MC simulations are conducted. In the simulation, the ASKF is used as the bench m ark and the approxi m ately decoupled KF in [20] is us ed for comparison. Note that the Kalman filters in all the m ethods are replaced by the EKF as the measurement is nonl inear with the target state. The initialization follows (30)-(35). The initial bistatic rang e biases are set as zeros and the corresponding covariance m atrix is set as an identity matrix multiplied (30 0 m) 2 . Then the initial target states are estimated using the biased bistatic ranges an d the bistatic velocities. The covariance m atrix is calculated according to (51) and (52). Fig. 2. T he simulation scenario. A square is plotted at the ter mina l of each target trajectory. Two metrics are utilized to measure the performance. One metric is the root mean square error (RMSE). It is calculated f or each time step using the 100 MC si m ulation results. Let t, n m r be the location o f target n in the m th MC si m ulation. t, ˆ n m r denotes the estimate of t, n m r . The RMSE of target location estim ation is expressed as 100 2 tt , t , 1 1 ˆ ˆ RMSE( ) . 100 nn n mm m rr r (53) Likewise, let m δ be the bistatic range bias vector in the m th MC simulation. ˆ m δ is the estimate of m δ . The RMSE of bistatic range bias estimation is expressed as 100 2 1 1 ˆ ˆ RMSE( ) 5. 100 mm m δδ δ (54) The other metric is the normalized estimation error squared (NEES) [33]. The NEES is used to check wheth er the estimator is consistent. The av erage NE ES of target location estimation i s defined as 100 T1 t t ,t , t , t ,t , 1 1 ˆ ˆ ˆ ˆ NEES( ) ( ) Cov( ) ( ), 100 nn n n n n mm m mm m rr r r r r (55) where t, ˆ Cov( ) n m r is the covariance matrix of t, ˆ n m r given by the estimator. Likewise, the average NEES of bistatic range bias esti mation c an als o be exp ressed in the same wa y. The RMSEs of the target location estim ation and the bistatic range bias estimation are shown in Fig. 3 and Fig. 4, respectively. Note that only the result of target 1 is given to reduce the length as the results of the other two targets are similar. The RMSEs of the proposed decoupled KF algorithm exactly coincide with that of the ASKF, which is consistent wit h the theorem. Moreover, the RMSEs of the proposed algorithm are much l o wer than that of t he approximately decoupled KF. Specifically, the RMSE of bistatic range bias of the proposed decoupled KF at 100 s is about 13.1 m while the one of the approximately decoupled KF is about 64.9 m . The proposed algorithm redu ces the bistatic range errors about 80% compared with the approximately d ecoupled KF under the simulation scenario. Fig. 3. The RM SEs of the target location es timation versus time of target 1. 0018-9251 (c) 2019 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information. This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TAES.2019.2945092, IEEE Transactions on Aerospace and Electronic Systems 9 Fig. 4. The RMSEs of the bistatic range bias estimation versus time. The av erage NEESs of target lo cation estimation and bistatic range bias estimation are shown in Fig. 5 and Fig. 6, respectively. The average NEES s of the proposed alg orithm also exactly coincide with that of the ASKF. Besides, the two- side 95% confidence r egions of the average NEESs are also ma rked b y bo ld re d li nes. Alm ost all the avera ge N EESs of the proposed algorithm lies in their 95% confidence region. It indicates that the proposed algorithm is consistent. By comparison, very few average NEESs of the approxi m ately decoupled KF appear in the 95% confidence region, ther eby inconsistent. It is caused by the ignored cross-correlation between target states and biases in the approximately decoupled KF. In addition, it should be mentioned that the e stim ation results of the proposed algorith m are also the same with that of the ASKF when we compare each single MC simulation. It f urther confirms the theorem in Section IV. Fig. 5. The average NEESs of the target location estimation ver sus time of target 1. Fig. 6. The average NEES s of the bistatic range bias estimation versus time B. Field Experimental Results We have developed an u ltrahigh frequency ( UHF) band passive radar system in Wuhan University. One set of the field experimental data in Nov. 2013 is uti lized to test the proposed algorithm. The digital television network in Wuhan city, China, is exploited as the illuminators of opportunity in this experim ent. The syste m configuration is with multiple transmitters and one receiver, as sh own in F ig. 7. The signal bandwidth is about 7.5 MHz. Automatic dependent surveillance-broadcast (ADS-B) is utilized to record the civil airline information. There are 3 l ow- altitude aircrafts in this data. One o f which has ADS-B reference information. The bistatic range bias references are calculated from the ADS-B reference information. Fig. 7. The geo metry of the fie ld experiment. In the real data, the det ected targets are in lo w altitude due to the elevation coverage of the digital television transm itting antenna. Nevertheless, three-dimensional (3-D) space is still considered. We also use the bistatic ranges and bistatic velocities for the multi-target state estimation and bias estimation. As the bistatic velocities are almost unbiased due to the synchronization of the global positioning system (GPS), we only consider the bistatic range bi ases. The white noise jer k model [32] is used as the dynamic model for real-life targets. The ini tialization also follows (24)-(29). The initial bistatic 0018-9251 (c) 2019 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information. This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TAES.2019.2945092, IEEE Transactions on Aerospace and Electronic Systems 10 range biases are set as zeros and the cor respon ding covariance matrix is set as identity matrix multiplied (400 m) 2 . The measurement n oi se standard deviations o f the bistatic range and b i s t a t i c v e l o c i t y a r e s e t a s 3 0 m a n d 1 . 5 m / s f o r t h e d a t a proce ssing. Fig. 8 shows the bistatic range bias estimates and the corresponding error i ntervals of the propo sed algorith m . For evaluation, the bias references obtained from the ADS-B information are also giv en. M ost of the ref erence valu es lie within the corresponding error intervals of the estimates. It i s clearer to draw this conclusion from Fig. 9 where the biases ar e aligned by shifting the reference values to zero. Specifically, the original bistatic range biases are distributed from −350 m to 150 m. After the es tim ation o f the propo sed algorithm, the residual bi static range biases changes are distributed from −40 m to 5 m. It indicat es that the bias estimation is effective. The corresponding target tracks of the proposed algorith m are shown in Fig. 10. The black arrows point out the moving directions of the aircrafts. The ADS-B references of one of the landing aircraft are marked by red circles. Meanwhile, we also give the target tracks obtained without registration. For ease of observation, we give th e zoomed figure at the ending part i n Fi g. 11. Many short and messy tracks can be ob served in the case without registration. It is the typical influence of sensor bia ses. It originates from the variously biased state estimates at different frames. By contrast, the target tracks o f the propose d algorithm are m uch better. The target tracks become continuous and almost coincide with the ADS-B r ef erences. Especially at the ending part, with the improvement of the bias estimation, the localization accuracy improves to about 50 m level. These results demonstrate that the proposed algorithm is effective fo r the real data. Fig. 8. The esti mated bistatic range bia ses of real data. Fig. 9. Aligned bistatic range b iases after shifting the refer e nce values to zero. Fig. 10. Target tracks of the proposed algorithm and that witho ut registration. Fig. 11. Zoomed figure of Fig. 10 at the ending part. VI. C ONCLUSIONS In this paper we provide a novel decoupled KF fo r the multitarget sta te estimation in the presence of unknown sensor biases. This decoupled KF deals with each target separately except that the bias vector esti m ates of all the single-target KF branches ar e fused and the fused bias vector estimate is fed ba ck 0018-9251 (c) 2019 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information. This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TAES.2019.2945092, IEEE Transactions on Aerospace and Electronic Systems 11 to each single-target KF branch. I t can readily handl e the case with a dynamic change of th e number of targets thanks to the decoupled structure. The computational complexity of the proposed decoupled KF is linear with the number of targets, and it is two orders lower than that of the A SKF. We prove that the proposed decoupled KF is exactly equivalent to the ASKF in terms o f the estimation results under a usual init i al condition . The simulation in the context of multistatic radars confirms th e equivalence. It also shows that the proposed algorithm r educes the bistatic range bias errors about 80% com pared with the approximately decoupled KF und er the si m ulation scenar io. More importantly, the proposed algorithm is also co nsistent with respect to the estimation error and corresponding covariance matrix. Field experimental data validates the practical feasibility of the proposed algorithm. In future work , furthe r research es under the ti m e-va rying sens or bias model will be a useful extension. The joint state estimation, registration and data association is also an interesting topic. A PPENDIX A. D ERIVATION OF (2 9) Assume that t n P and b n P are non-singular matrices. We first expand 1 tt b 1 T tb b nn nn n PP P PP . The block matrix inversion formula is expressed in (56). Applying (56) to 1 n P , we obtain (57). Then we analyze 1 f n P . Partition 1 f n P according to the target states and biases, na m ely 11 ft ft b 1 f 1T 1 ft b fb [] [] [] [] nn n nn PP P PP . Likewise, applying (56) to (28), we obtain (58), (59), (60), an d (61). Compa ring (57) with (61), we obtain (29). 1 11 11 1 11 11 1 11 1 1 1 11 1 1 11 1 1 () () () () . () ( ) () () AU AU D V AU D V U D AU D V AU D V U D VD DV A U DV D V AU DV A U DV D DV A U DV U D (56) 1T 1 1T 1 1 tt b b t b tt b b t b t b b 1 1T 1T 1 1 1T 1T 1 1 bt b t t b bt b b bt b t t b bt b t b b () () . () () nn n n nn n n n n nnn n nn n nnn n nn n n n PP P P PP P P P P P PP P PPP P PP P PPP PP (57) 1 11 1 T 1 1 1 T 1 T 1 f t t tb b b f b b tb tb b f b f b fb b tb t tb b tb [] ( ) ( ) , nn n n n n n n n n n n n n n P P PP P P P P PP P P P PP P PPP (58) 11 1 1 1 T 1 1 f tb f t tb b fb fb t tb b tb tb b [] [] ( ) , n n nn n nn n nn P P PPP P P PPP PP (59) 1 1 1 1T 1 1 1 1T 1T 1 1 f b fb fb fb b tb ft tb b fb fb fb b tb t tb b tb tb b [] ( ) , n nn n n n nnn n nn n n P P PP PP U PPP P P PP P PPP PP (60) 1T 1 1T 1 1 tt b b t b tt b b t b t b b 1 f 1T 1T 1 1 1T 1T 1 1 b tb t tb b tb fb b tb t tb b tb tb b () () . () () nn n n nn n n n n n nnn n nn nnn n nn n n PP P P PP P P P P P PP P PPP P PP P PPP PP (61) A PPENDIX B. P ROOF OF THE T HEOREM W HEN 2 N We propose an inductive proof for the ca se of 2 targets. According to t he initialization (30)-(35), the initial states a nd covariance m atrices of the decoupled KF is the sa m e to that of the ASKF. Thus, we only need to prove that * ft t ˆ ˆ nn xx , * f ˆ ˆ bb , * ft t nn PP , * ftb tb nn PP , * fb b PP , 1, 2 n holds if * ft t ˆ ˆ (|) (|) nn kk kk xx , * f ˆˆ (| ) (|) kk kk bb , * ft t (|) (|) nn kk kk PP , * ftb tb (|) (|) nn kk kk PP , * fb b (| ) (|) kk kk PP , 1, 2 n . According to the one-step pred iction equations (7), (8), (16), (17), (23), and (24), we can obtain that * tt ˆ ˆ (1 | ) (1 | ) nn kk kk xx , * f ˆ ˆ (1 | ) (1 | ) kk kk bb , * tt nn PP , * tb tb nn PP , * fb b b n PP P , 1, 2 n . 1) First, we prov e * fb b P P . Applying the block matrix inversion formula to (46), t he covariance submatrix of the bias is equal to * b P . That is 11 2 2 1 1 1 2 2 2 11 1 11 1 22 2 22 2 *1 *1 T 1 T 1 *1 T T 1 *1 T T 1 b b b1 b b 2 b t b b1 t t b b 2 t 1 *1 T 1 *1 T 1 tt 1 t t bt 1 b * 1 T1 * 1 T1 tt 2 t t bt 2 b *1 * bb [] [] [] [] [] [] [] P P HRH H RH P HRH P H RH PH R H O P H R H O P HR H P HR H PP 11 1 1 1 1 1 11 1 1 1 1 1 1 1 22 2 2 2 2 2 22 2 1 1* T * * * 1* T * * 1 T 1 tb t tb b tb tb b b 1 b 1 *1 T T 1 *1 T 1 *1 T 1 tb b 1 t t t 1 t tb t 1 b 1 *1 * T * * *1 * T * *1 T 1 bt b t t b bt b t b b b 2 b *1 T T 1 tb b 2 t [] [] [] [] [ PP P P P P P H R H P HRH P H RH P H RH PP P P PP P P H R H PH R H P 22 2 22 2 1 *1 T 1 *1 T 1 tt 2 t t bt 2 b ][ ] , HR H P HR H (62) 0018-9251 (c) 2019 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information. This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TAES.2019.2945092, IEEE Transactions on Aerospace and Electronic Systems 12 where (44) has been applied. Note that the target indices are decoupled in the terms in (62). In addition, in the single-target KF branch for the target 1 an d 2, partitioning 1 1 P and 1 2 P according to the target states and sensors biases, we have the f ollowing block matrices 11 1 1t 1t b 1 1T 1 1t b 1 b [] [] , [] [] PP P PP (63) 11 1 2t 2t b 2 1T 1 2t b 2b [] [] , [] [] PP P PP (64) For 1 1 P and 1 2 P , following the si m ilar s teps from (42) to (45), we can obtain 11 1* 1 1 * 1 1 t t 1 tb tb [] [ ] , [][ ] , PP P P (65) 22 1* 1 1 * 1 2 t t 2 tb tb [] [ ] , [][ ] , PP P P (66) 11 1 1 1 1 1 * 1 * 1* T * * * 1* T * * 1 1 b b b tb t tb b tb tb b [] P P PP P P PP P P , (67) 22 2 2 2 1 1* 1 * 1 * T * * * 1 * T * * 1 2 b b b tb t tb b tb tb b [] . PP P P P P P P P P (68) Note that only 1 1b [] P and 1 2b [] P are diff erent from the *1 b [] P in *1 P . 1 1 P and 1 2 P can then be rewritten as 11 1 *1 *1 tt b 1 1 *1 T 1 tb 1 b [] [] , [] [ ] PP P PP (69) 22 2 *1 *1 tt b 1 2 *1 T 1 tb 2 b [] [] , [] [ ] PP P PP (70) According to (22), 1 1 P and 1 2 P conform to 11 1 11 1 11 1 1 1 *1 T 1 *1 T 1 tt 1 t t bt 1 b 1 1 *1 T T 1 1 T 1 tb b 1 t 1 b b 1 b [] [] , [] [ ] P H RH P H RH P P HRH P HRH (71) 22 2 22 2 22 2 2 2 *1 T 1 *1 T 1 tt 2 t t bt 2 b 1 2 *1 T T 1 1 T 1 tb b 2 t 2 b b 2 b [] [] . [] [ ] P H RH P H RH P P H RH P H RH (72) Applying the block matrix inversion formula to (69), (70), (71), and (72), we obtain 11 1 1 1 1 1 1 1 11 1 1 1 1 1 1 1 1 1 1 * 1 *T * * * 1 *T * * 1 T 1 bb b t b t t b b t b t b b b 1 b 1 *1 T T 1 *1 T 1 *1 T 1 tb b 1 t t t 1 t tb t 1 b [] [] [] , PP P P P P P P P P H R H P HRH P H RH P H RH (73) 22 2 22 2 2 2 2 22 2 2 2 2 2 2 2 1 11 * 1 * T * * * 1 * T* * 1 T 1 b b bt b t t b bt b t b b b 2b 1 *1 T T 1 *1 T 1 *1 T 1 tb b 2 t t t 2 t tb t 2 b [] [] [] , P P PP P P PP P P H R H P H RH P H RH P H RH (74) where (67) and (68) have been applied. Substituting (73) and (74) into (62), we o btain 11 22 *1 *1 1 1 1 1 b b bbbb . P P PP PP (75) Given *1 1 b fb P P , comparing (75) with (26), we draw the conclusion 11 22 *1 1 1 1 1 1 1 b fb b b b b fb . PP P P P P P (76) 2) S econd, we prove * f ˆ ˆ bb and * ft t ˆ ˆ nn xx . Applying the block matrix inv ersion formula to (71) and (72), we obtain 11 1 1 1 1 1 1 1 1* 1 T 1 * 1 T 1 tb b t t 1 t tb t 1 b [] [] , P P P H RH P H RH (77) 22 2 2 2 2 2 2 1 1* 1 T 1 * 1T 1 tb b t t 2 t tb t 2 b [] [] , P P P H RH P H RH (78) 11 1 1 1 1 1 1 1 1 1 1 11 1 1 1 1 11 T 1 * 1 T T 1 * 1 T 1 * 1 T 1 b 1 b b 1b t b b 1t t t 1t t b t 1b *1 T T 1 1 tb b 1 t tb b [ ] [] [] [] [] , PP H R H P H R H P H R H P H R H PH R H P P (79) 22 2 2 2 2 2 2 2 2 2 2 22 2 2 2 1 11T 1 * 1 T T 1 * 1 T 1 * 1 T 1 b 2 b b 2b t b b 2t t t 2 t t b t 2b *1 T T 1 1 tb b 2 t tb b [ ] [] [] [] [] . PP H R H P H R H P H R H P H R H PH R H P P (80) Substituting ( 45) and (46) into ( 1 2) and expanding it, we obtai n 11 1 1 11 1 1 1 1 1 *1 T 1 * *1 T 1 * *1 * *1 * T 1 tt 1 t t t bt 1 b t t t b t 1 1 ˆ ˆ ˆˆ [] [] [] ( 1 | ) [] ( 1 | ) + , kk kk P HR H x P HR H b P x P b HR z (81) 22 2 2 2 2 2 2 2 2 2 *1 T 1 * *1 T 1 * *1 * *1 * T 1 tt 2 t t t b t 2 b t t t b t 2 2 ˆˆ ˆ ˆ [] + [] [] ( 1 | ) [] ( 1 | ) , kk kk P HR H x P HR H b P x P b HR z (82) 11 1 1 2 2 2 2 1 1 2 2 11 2 2 12 *1 T T 1 * *1 T T 1 * *1 T 1 T 1 * tb b 1 t t tb b 2 t t b b 1 b b 2 b *1 T * *1 T * *1 * T 1 T 1 t b t t bt b b 1 1 b2 2 ˆ ˆˆ [] [] [] + ˆ ˆˆ [] ( 1 | ) [] ( 1 | ) [] ( 1 | ) . kk kk kk P HRH x P H RH x P HRH H R H b Px P x P b H R z H R z (83) Likewise, subst ituting (69), (70), (71), and (72) into (21) an d expanding them, we obtain 0018-9251 (c) 2019 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information. This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TAES.2019.2945092, IEEE Transactions on Aerospace and Electronic Systems 13 11 1 1 1 1 1 1 1 1 1 *1 T 1 *1 T 1 *1 *1 T 1 tt 1 t t t b t 1 b 1 t t t b 1 t 1 1 ˆ ˆ ˆˆ [] [] + [] ( 1 | ) [] ( 1 | ) + , kk kk P HR H x P HR H b P x P b HR z (84) 11 1 1 1 1 1 1 1 *1 T T 1 1 T 1 *1 T 1 T 1 t b b1 t t 1 b b1 b 1 t b t 1 b 1 b1 1 ˆˆ ˆ ˆ [] [ ] + [] ( 1 | ) [ ] ( 1 | ) , kk kk PH R H x P H R H b P x P b H R z (85) 22 2 2 22 2 2 2 2 2 *1 T 1 *1 T 1 *1 *1 T 1 tt 2 t t t bt 2 b 2 t t t b 2 t 2 2 ˆˆ ˆ ˆ [] + [] + [] ( 1 | ) []( 1 | ) , kk k k PH R H x P H R H b P x P b H R z (86) 22 2 2 2 2 2 2 2 *1 T T 1 1 T 1 *1 T 1 T 1 tb b 2 t t 2 b b 2 b 2 tb t 2 b 2 b 2 2 ˆˆ ˆ ˆ [] [ ] + [] ( 1 | ) [ ] ( 1 | ) . kk kk PH R H x P H R H b P x P b H R z (87) Subtracting (84) from (81), we have 11 1 1 1 1 1 11 1 1 1 1 1 *1 T 1 * *1 T 1 * *1 T 1 *1 T 1 tt 1 t t t b t 1 b tt 1 t t t b t 1 b 1 ˆˆ ˆ ˆ [] [] + [] [] + . PH R H x P H R H b PH R H x P H R H b (88) Then we can obtain 11 1 1 1 1 1 1 1 1 1 1 ** 1 T 1 * 1 T 1 * 1 * tt t t 1 t t b t 1 b 1 t t b b 1 ˆ ˆˆ ˆ ˆˆ ˆ [] [] ( ) ( ) , x x P H RH P H RH b b x PP b b (89) where (77) has been applied. Likewise, subtract ing (86) from (82), we can obtai n 22 2 2 *1 * tt t b b 2 ˆˆ ˆ ˆ () . xx P P b b (90) Subtracting (85) and (87) from (83), we obtain 11 1 1 1 2 2 2 2 2 1 1 2 2 11 22 *1 T T 1 * *1 T T 1 * *1 T 1 T 1 * *1 * tb b 1 t t t tb b 2 t t t b b 1 b b 2 b b 1T 1 1 1T 1 1 1b b 1 b 1 1b 1 2 b b 2 b 2 2 b 2 ˆˆ ˆˆ ˆ ˆ [] ( ) [] ( ) [] [] ( 1 | ) ˆˆ ˆ ˆ [] [] ( 1 | ) [] [ ] ( kk kk k P HRH x x P H RH x x P HRH H RH b P b PH R H b P b PH R H b P b 1| ) . k (91) Substituting (89) and (90) into ( 91) and applying (79) and (80) , we can obtain 11 1 22 2 11 2 2 11 2 11 T 1 * 11T 1 * b1 b b 1 b 1 b 2 b b 2 b 2 *1 T 1 T 1 * *1 * bb 1 b b 2 b b 1T 1 1 1T 1b b 1 b 1 1b 1 2 b b ˆˆ ˆ ˆ [] ( ) [] ( ) ˆˆ [] [] ( 1 | ) ˆ ˆ [] [] ( 1 | ) [] kk kk PP H R H b b PP H R H b b PH R H H R H b P b PH R H b P b PH 2 11 2b2 2 b 2 ˆ ˆ [] ( 1 | ) . kk RH b P b (92) Merging the same terms in (92), we obt ain 12 12 11 * 1 1 1 * * 1 * 1 1 1 1 b b b 1 b2 b b b 1 1 b 1 b 22 b 2 ˆ ˆˆ ˆ ˆ ˆ [ ] [] [] [ ] ( 1 | ) [] ( 1 | ) [] ( 1 | ) . kk kk kk P P P P P b P b Pb P b Pb P b (93) Applying * 12 ˆ ˆˆ (1 | ) (1 | ) (1 | ) kk kk kk bb b , 12 *1 1 1 b bb PP P , and substituting (44), (67) and (68) into (93), we obtain 12 11 2 2 11 * 1 * * 1 * bbb b 11 1 1 b1 b1 b 2 b 2 ˆˆ (1 | ) ˆˆ ˆ ˆ (1 | ) (1 | ) . kk kk kk PPP b P b Pb Pb Pb Pb (94) According to (76), it can be readily obtained that 12 11 * 1 1 b bb f b PPP P . Comparing (94) with (26), we draw t he conclusion * f ˆˆ . bb (95) Substituting (95) into (89) a nd (90) a nd comparing the m with (27), we draw the conclusion * tf t ˆ ˆ ,1 , 2 . nn n xx (96) 3) Finally, we prove * ft t nn PP and * ftb tb nn PP . Note that (48) can also be expressed as 11 1 11 1 11 1 2 22 22 2 2 2 2 1 * 1 T1 * 1 T1 1* * tt 1 t t bt 1 b tb b b tb * b * 11 * *1 T 1 *1 T 1 tb tb b b tt 2 t t bt 2 b [] [] , [] [] P H RH P H RH PP P P P P PPP P H RH P H RH (97) where (77) and (78) has been applied. Comparing (97) with (28) and applying (76) (i.e. * b fb PP ), we draw the conclusion * tb ftb ,1 , 2 . nn n PP (98) Besides, according to (28), (29), (71) and (72), we obtain 1 * 1 T1 * 1 T1 ft ftb tt t t bt b 1 f T *1 T T 1 1 T 1 1 1 ftb fb tb b t b b b fb b [] [] ,1 , 2 . [] [ ] nn nn n nn n n nn n n n n nn n nn n n PP PH R H P H R H P PP PH R H P H R H P P (99) 0018-9251 (c) 2019 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information. This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TAES.2019.2945092, IEEE Transactions on Aerospace and Electronic Systems 14 Applying the block matrix inversion for m ula to (99), we obtain 1 1T * 1 T 1 ft ftb fb ftb t t t [] , 1 , 2 . nn n n n n n n PP P P P H R H (100) Comparing (100) wi th (49) and applying (76) (i.e. * b fb P P ) and (98) (i.e. * tb ftb nn PP ), we draw the conclusion * tf t ,1 , 2 . nn n PP (101) In summary, eq. (76), ( 9 5), (96), (98), and (101) give the desired conclusions at 1 k . The theorem is proved wh en 2 N . A CKNOWLEDG MENT The authors wish to express their gratitude to Prof. Henry Leung for his discussion on this topic. R EFER ENCES [1] G. Battistelli, L. Chisci, S. Morrocchi, F. Papi, A. Farina, an d A. Graziano, “Robust m ultisensor multitarget tracker with application to pas sive multistatic radar tracking,” IEEE Trans. Ae rosp. Electron. Syst. , vol. 48, no. 4, pp. 3450-3472, 2012. [2] J. Yi, X. Wan, H. Leung, and F. Cheng, “MIMO passive radar trac king under a single frequency network,” IEEE Journa l of Se lect ed Top ics i n Signa l Proc ess ing , vol. 9 , no. 8, pp. 166 1-1671, 2015. [3] Vivone, G., Braca P., Granstrom K., and W illett P., “Multistati c B ayesian extended target tracking,” IEEE Trans. Ae rosp. Electron . Syst. , vol. 52, no. 6, pp. 2626-2643, 2016. [4] N. H. Nguyen, and K. Doğançay, “ Multistatic pseudolinear target motion analysis using hybrid measurements,” Signal Processing , vol. 130, pp. 22- 36, 2017. [5] M. P. Dana, "Registration: A pre requisite f or multiple sensor t racking," in Multitarget-Multisensor Tracking: Advanced A pplications, ch. 5, pp 155- 185. MA: Artec h House, 1990. [6] D. Hambrick, and W . D. Blair, “M ultisensor track association in t h e presence of bias,” 2014 IEEE Aerospa ce Conference , pp. 1-6, 2014. [7] O. Jean, and A. J. Weiss, “Passive localization and sy nchroniza tion using arbitrary signals,” IEEE Trans. Signal Process. , vol. 62, no. 8, pp. 2143- 2150, 2014. [8] E. Taghavi, R. Tharmaras a, T. Kirubara jan, Y. Bar-Shalom , and M . Mcdonald, “A practical bias estimation algorithm for multisenso r- multitarget tracking,” IEEE Trans. Aerosp. Electron. Syst. , vol. 52 , no. 1, pp. 2-19 , 2016. [9] J. Yi, X. Wan, H. Leung, M. Lü, and F. Cheng, “Noncooperative registration for multistatic passive radars,” IEEE Trans. Ae rosp. Ele ctron . Sys t. , vol. 52, no. 2, pp. 563-575, 2016. [10] S. S. Jang, B. Joseph, and H. Mukai, “Com parison of two approac hes to on-line parameter and state estimation of nonlinear systems,” Ind. Eng. Chem. Pr ocess Des. Dev. , vol. 25, no. 3, pp. 809-814, 1986. [11] S. Blackma n, and R. Popoli, “Design and Analys is of Modern Tracking Systems,” London: Artech House, 1999, pp. 696-697. [12] R. Togneri, and L. Deng, “Joint state and parameter estimation for a target-directed nonlinear dyna m ic system model,” IEEE Trans. Signal Process. , vol. 51, no. 12, pp. 3061-3070, 2003. [13] H . H. Afshari, S. A. Gadsden, an d S. H abibi, “Gau ssian filters f or parameter and state estimation: A general review of theory and recent trends,” Signal Processing , vol. 135, pp. 218-238, 2017. [14] G. Storvik, “Parti cle filters for state-space models with the p resence o f unknown static paramet ers,” IEEE Trans. Signal Process. , vol. 50, no. 2, pp. 281-289, 2002. [15] P. M. Djuric, T. Lu, and M. F. Bugallo, “Multiple particle filt ering,” in 2007 IEEE International Conference on Acoustics, Speech and Signal Processing - IC ASSP '07, Honolulu, Hawaii, USA, vol. 3, pp. 1181-1184, Apr. 15-20, 2007. [16] B. Friedland, “Treatment of b ias in recursive filtering,” IEEE Transactions on Automa tic Control , vol. AC-14, no. 4, pp. 359-367, 1 969. [17] M. B. Ignagni, “An alternate derivation and extension of Friedl and’s two - stage Kalman estimator,” IEEE Transactions on Automatic Control , vol. AC-26, no. 3, pp. 746-750, 1981. [18] A. T. Alouani, T. R. Rice, and W. D. Blair, “A two-stage filter f o r s t a t e estimation in the presence of d ynami cal stocha s tic bias,” in Proceedings of the 1992 American Control Conference , Chicago, USA, June 2 4-26, 1992, pp. 1784-1788. [19] C. S . Hsieh, and F. C. Chen, “Optimal solution of the two-stag e Kalm an estimator,” IEEE Transactions on Automa t ic Control , vol. 44, no. 1, pp. 194-199, 1999. [20] B. A. van Doorn, and H. A. P. Blom, “S ys tematic error estimatio n in multisensor fusion systems,” in Proceedings of SPIE Conference on Signa l and D ata Pr oces sing of Small Targ ets , vol. 195 4, Orlando, FL, USA, Apr. 1993, pp. 450-461. [21] X. Lin, Y. Bar-Shalom, and T. Kirubarajan, “Exact multisensor d yna mic bias estimation with local tracks,” IEEE Tran s . Aeros p. Electron. Syst. , vol. 40, no. 2, pp. 576-590, 2004. [22] I. Fukumori, “A partitioned Kalman filter and smoother,” Mont hly Weather Review , vol. 130, no. 5, pp. 1370-1383, 2002. [23] M. Raitoharj u, and R. Piché, “On computational co mplexity reduc tion methods for Kal man filter extensions,” arXiv:1512.03077v4 [cs.S Y], 30 Mar 2018. [24] J. E . Guivant, “The generalized co m pressed Kalman filter,” Robo tica, vol. 35, no. 8, pp. 1639–166 9, 2017. [25] C. T. Chen, “Linear System Theory and Design,” third ed., New Y ork: Oxford University Pres s, 1998, p. 156. [26] M. Aoki, “Optimization of Stochastic Systems,” New York: Academ ic Press, 1967, pp. 212-217. [27] A. H. Jaz winski, “St ochastic Processes a nd Filtering Theory ,” N ew York and London: Academ ic Press, 1970, pp. 231-23 3. [28] H. F. Chen, “On stochastic observability and controllability,” Automatica, vol. 16, no.2, pp. 179-190, 1980. [29] A. R. Liu, and R. R. Bitmead, “ Stochastic Observability in Netw ork State Estimation and Control,” Automatica, vol. 47, no. 1, pp. 65-78, 2011. [30] X. Zhang, “Matrix Analysis and Applications,” second ed., Beiji ng: Tsinghua University Press, 2013, p. 57. [31] Y. Bar-Shalom, and X. R. Li, “ Multitarget-Multisensor Tracking: Principles and Techniques,” Storrs, CT: YBS Publishing, 1995, p p. 462- 465. [32] X. R. Li, and V. P . Jilkov, “Survey of m aneuvering target track ing—part I: d ynamic model s”, IEEE Transactions on Aerospace and Electronic Systems , vol. 39, no. 4, pp. 1333-1364, 2003. [33] Y. Bar-Shalom, X. R. Li, and T. Kirubarajan, “Estimation with Applications to Trac king and Navigation,” New York: W iley, 2001 , pp.234-235. Jianxin Yi ( M’18) received the B.E. degree in electrical and electronic engineering, in 2011, and the Ph.D. degree in radio physics, in 2016, both from Wuhan University, China. From Aug. 2 014 to Aug. 2015, he was also a visiting Ph.D. student at University of Calgary, Canada. He is now a research associate prof essor at the School of Electronic Infor m ation, Wuhan University. He was the recipient of the 2017 Excellent Doctoral Dissertation Award o f the Chinese Institute of Electronics. He has been supported by the Postdoctoral Innovation Talent Support Progra m of Chi na. His main r esearch interests include r ad ar signal process ing, target tracking, and information fusion. Xianrong Wan received the B.E. degree from the former Wuh an Technic al University of Surveying and Mapping, China, in 1997, and the Ph.D. degree f rom Wuhan University, China, in 2005. He is now a professor a nd Ph.D. candidate supervisor of the School of Electronic Information, Wuhan University. Recent 0018-9251 (c) 2019 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information. This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TAES.2019.2945092, IEEE Transactions on Aerospace and Electronic Systems 15 years he has hosted and participated in more than ten national research projects, and published more than 80 acade m ic papers. His main research interests include design of new radar system such as passive radar, over-the-horizon radar, and array signal proce ssing. Deshi Li received the Ph.D. degree in Computer Application Technology from Wuhan Univ ersity. From Oct. 2006 to Oct. 2007, he was a visiting scholar of the Networ k Lab of t he Univ ersity of California at Davis. He is now a professor and t he dean of the School o f Electronic Infor m ation, Wuhan University. He currently serves as a member of the Internet of Things Expert Committee and a member of the Education Committee of Chinese Institute of Electronics. He is the Associate Ch i ef scientist in Space Communication area of Collaborative Innovation Center of Geospatial Technology, and is also an Executive Trustee member of Chi na Cloud System Pioneer Strategic Alliance. His main research interests include sensor networks, intel ligence system, SOC design and verification methodo logy.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment