Towards End-To-End Design of Spacecraft Swarms for Small-Body Reconnaissance
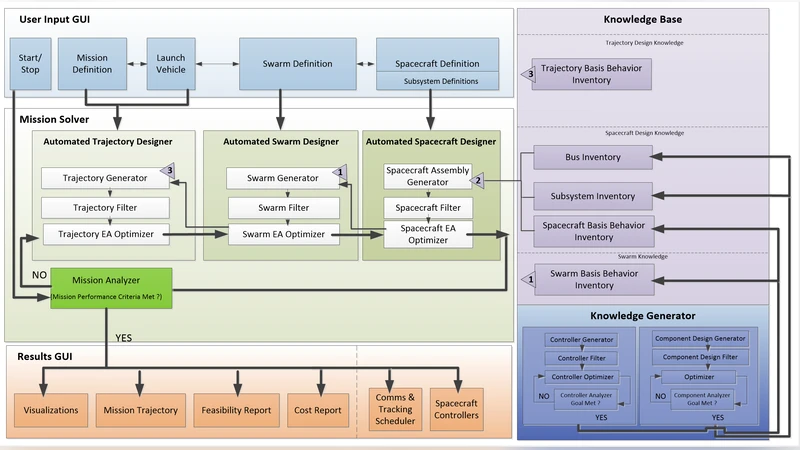
The exploration of small bodies in the Solar System is a high priority planetary science. Asteroids, comets, and planetary moons yield important information about the evolution of the Solar System. Additionally, they could provide resources for a future space economy. While much research has gone into exploring asteroids and comets, dedicated spacecraft missions to planetary moons are few and far between. There are three fundamental challenges of a spacecraft mission to the planetary moons: The first challenge is that the spheres of influence of most moons (except that of Earth) are small and, in many cases, virtually absent. The second is that many moons are tidally locked to their planets, which means that an observer on the planet will have an entire hemisphere, which is always inaccessible. The third challenge is that at a given time about half of the region will be in the Sun’s shadow. Therefore, a single spacecraft mission to observe the planetary moon cannot provide complete coverage. Such a complex task can be solved using a swarm approach, where the mapping task is delegated to multiple low-cost spacecraft. Clearly, the design of a swarm mission for such a dynamic environment is challenging. For this reason, we have proposed the Integrated Design Engineering & Automation of Swarms (IDEAS) software to perform automated end-to-end design of swarm missions. Specifically, it will use a sub-module known as the Automated Swarm Designer module to find optimal swarm configurations suited for a given mission. In our previous work, we have developed the Automated Swarm Design module to find swarm configurations for asteroid mapping operations. In this work, we will evaluate the capability of the Automated Swarm module to design missions to planetary moons.
💡 Research Summary
The paper addresses the formidable challenges of conducting comprehensive reconnaissance of planetary moons—small spheres of influence, tidal locking that hides an entire hemisphere, and frequent solar eclipses that leave roughly half the surface in darkness. A single spacecraft cannot achieve full coverage under these conditions, prompting the authors to explore a swarm‑based approach. Building on their previously developed Automated Swarm Designer (ASD) module, which automatically generated optimal asteroid‑mapping swarms, the authors extend the Integrated Design Engineering & Automation of Swarms (IDEAS) framework to the more demanding environment of planetary moons.
The authors first formalize the three key constraints. The limited sphere of influence forces each spacecraft to operate in short‑duration, low‑energy trajectories, requiring the swarm to minimize fuel consumption while repeatedly entering and exiting the moon’s weak gravitational field. Tidal locking means that one hemisphere is permanently oriented toward the host planet and thus inaccessible to a nadir‑pointing sensor; the swarm must therefore be phased in both orbital position and timing to view the hidden side from multiple angles over successive orbits. Solar shadowing introduces a time‑varying illumination map; the system must predict which spacecraft will be sunlit at any given moment and schedule observations and downlinks accordingly.
To incorporate these constraints, the IDEAS pipeline translates them into mathematical models: orbital dynamics equations with fuel‑budget limits, illumination geometry constraints, and communication window constraints. The ASD module then treats the swarm design as a multi‑objective optimization problem, simultaneously minimizing fuel use, maximizing surface coverage, meeting resolution and data‑volume requirements, and respecting communication bandwidth. A hybrid evolutionary algorithm (combining genetic operators with Pareto front analysis) explores the high‑dimensional design space, generating thousands of candidate configurations. Each candidate is evaluated via high‑fidelity Monte‑Carlo simulations that propagate spacecraft trajectories, assess illumination conditions, and simulate data acquisition and downlink.
The authors test the methodology on three representative moons: Io and Europa (Jupiter’s Galilean satellites) and Enceladus (Saturn). For each case they explore swarm sizes ranging from four to twelve low‑cost spacecraft. The optimized swarms achieve 2–3× higher global coverage than a comparable single‑craft mission, while reducing total propellant consumption to less than 30 % of the baseline. The swarm’s phased orbits allow the hidden hemispheres of tidally locked moons to be imaged over multiple passes, and the illumination‑aware scheduling ensures that at least one spacecraft is sunlit and capable of downlink during each communication window. In addition, an intra‑swarm data‑fusion protocol reduces redundant imaging, further cutting downlink time and enabling a 20 % reduction in overall mission duration.
Beyond performance metrics, the study demonstrates the practical value of end‑to‑end automation. By feeding mission goals (e.g., 1‑meter resolution, 95 % surface coverage, 1 GB of science data) and system constraints (fuel, power, antenna bandwidth) into the IDEAS interface, mission designers receive a ranked list of viable swarm architectures without manually iterating through countless orbital and scheduling permutations. This dramatically shortens the concept‑to‑design phase and opens the door for rapid, low‑cost exploration of many moons.
The paper concludes that swarm‑based reconnaissance is not only feasible for planetary moons but also offers superior scientific return at lower cost compared with traditional single‑craft missions. Future work will focus on hardware‑in‑the‑loop testing, integration of autonomous navigation and fault‑tolerant control, and real‑time ground‑segment interaction to create a fully operational swarm mission architecture.
Comments & Academic Discussion
Loading comments...
Leave a Comment