Microgrid Optimal State Estimation Over IoT Wireless Sensor Networks With Event-Based Measurements
In a microgrid, real-time state estimation has always been a challenge due to several factors such as the complexity of computations, constraints of the communication network and low inertia. In this paper, a real-time event-based optimal linear stat…
Authors: Seyer Amir Alavi, Mehrnaz Javadipour, Kamyar Mehran
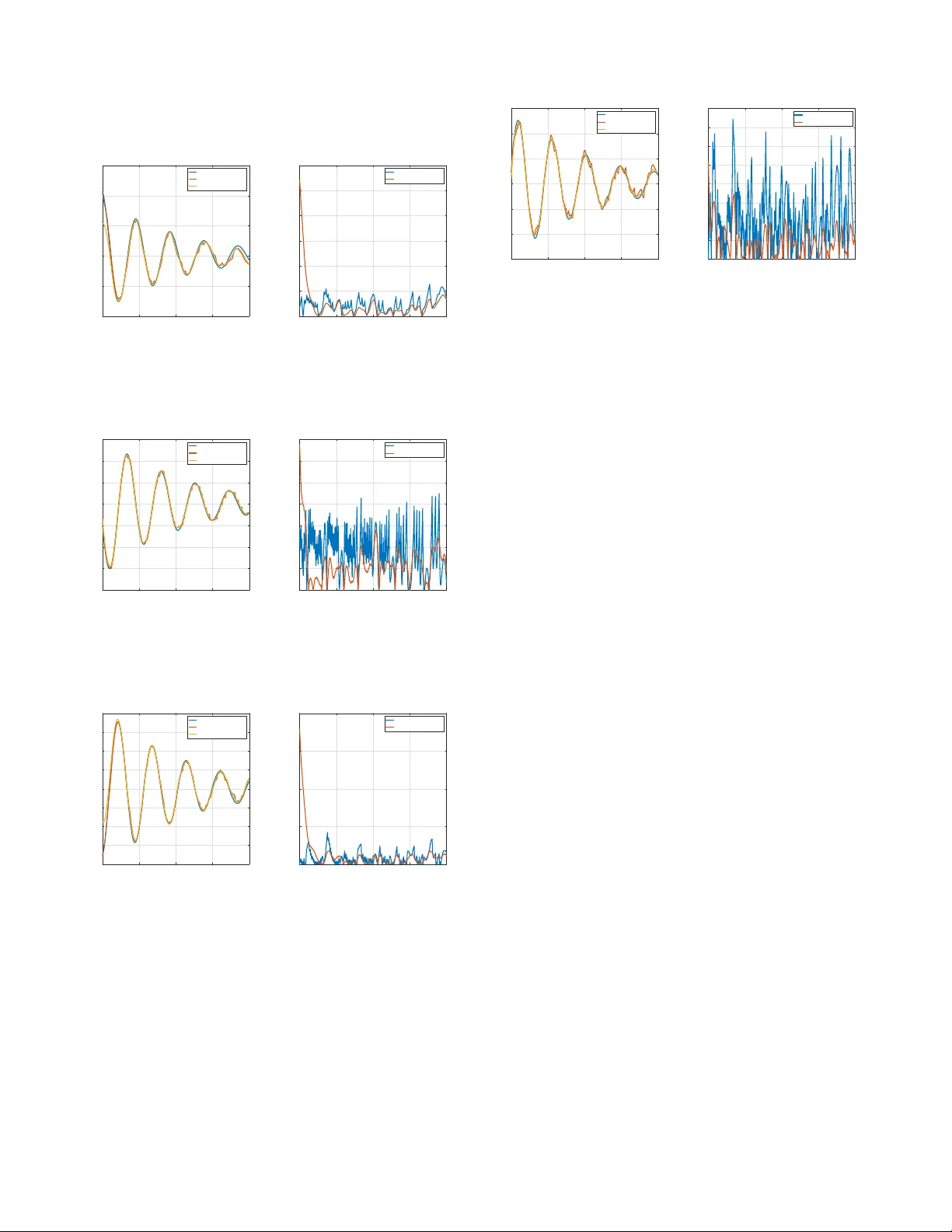
Microgrid Optimal State Estimation Ov er IoT W ireless Sensor Networks W ith Ev ent-Based Measurements Seyed Amir Alavi, Mehrnaz Jav adipour , Kamyar Mehran School of Electronic Engineering and Computer Science Queen Mary Univ ersity of London London E1 4NS, UK { s.alavi, m.jav adipour , k.mehran } @qmul.ac.uk Abstract —In a microgrid, real-time state estimation has always been a challenge due to several factors such as the complexity of computations, constraints of the communication network and lo w inertia. In this paper , a real-time event-based optimal linear state estimator is introduced, which uses the send-on- delta data collection approach ov er wireless sensors networks and exhibits low computation and communication resour ces cost. By employing the send-on-delta event-based measurement strategy , the burden over the wireless sensor network is reduced due to the transmission of events only when there is a significant variation in the signals. The state estimator structure is developed based on the linear Kalman filter with the additional steps for the centralized fusion of e vents data and optimal reconstruction of signals by projection onto con vex sets. Also f or the practical feasibility analysis, this paper developed an Inter net of things prototype platform based on LoRaW AN protocol that satisfies the requir ements of the pr oposed state estimator in a microgrid. Index T erms —Event-based estimation, IoT , LoRaW AN, micro- grid, POCS, Send-on-Delta Kalman filter , Thingsboard, WSN. I . I N T RO D U C T I O N Microgrids are small po wer systems that are able to operate independent of the main grid. The independent operation enables the optimal integration of renewable ener gy sources into the power system and also provides a higher degree of freedom in ener gy management comparing to the traditional power grid. Despite the advantages, microgrids poses low inertia, i.e. the system is more prone to instabilities dri ven by disturbances, and therefore, robust controllers should be employed to guarantee the continuous operation [1], [2]. State estimation is an important part of a robust controller , as a high number of the robust control techniques are based on state feedback [3], [4]. Also for the systems which are based on the output signal feedback, state estimation is ine vitable for internal stability analysis and situational a wareness (SA) [5], [6]. The low inertia characteristic of the microgrids necessitates that the state estimator to work in real-time with a reasonable communication and computation cost [7]. In the literature of state estimators, two dif ferent approaches hav e been taken, distributed and centralized state estimation [8]. Both approaches have advantages that suits them for the specific application. Distributed state estimation approach is mainly used when the system is large and the computation cost of a centralized estimator would make the solution infeasible. Although distributed approaches remov e the single point of failure problem, it requires a high number of computing agents for state estimation tasks, which is not appropriate for small to medium sized microgrids [9]–[11]. In contrast, the basic assumption in the centralized state estimation approach, is to have a single estimator , which collects the data from the sensors installed throughout the microgrid. Therefore, the sensors doesn’t need to be smart and computationally powerful, as they only ha ve to measure and send the data to the collector [12], [13]. Furthermore, the rate at which the sensors transmit the measurements greatly affects the performance of the state estimator , the network traffic, and the energy consumption of battery based nodes [14]. T raditional state estimator theories were originally de veloped based on the fact that the signals were sampled periodically with a predetermined sampling period. W ith the advent of Internet of things (IoT) communication technologies, this basic assumption is not practical anymore, because the IoT technol- ogy trend is mo ving to ward lo wer speed communication for longer distances and reduced power for wireless transmission [7], [15]. Therefore, modernized state estimators should be designed as such that are able to fuse the e vent-based data from different sensors across the microgrid. T o address this need, the authors in this paper propose a centralized event-based optimal linear state estimator , suitable for medium sized microgrids, with Send-on-Delta (SoD) mea- surements. The estimator uses projection onto con vex sets (POCS) technique [16] to optimally reconstruct the sparse receiv ed data from the nodes and then reduces the estimation error of ev ent-based Kalman filter . In Section II, microgrid data modeling for both A C and DC ones is provided. Afterw ard the proposed estimator is intro- duced in Section III based on the modeled data. The dev eloped ev ent-based Kalman estimator is formulated in Section IV and the POCS data recov ery technique is discussed in Section V. In Section VI, the implemented setup for e valuation of the estimation strategy is sho wn. Finally , Section VII presents the results of the analysis. The paper is concluded in Section VIII. I I . M I C RO G R I D S TA T E E S T I M AT I O N D A TA M O D E L I N G In this section the problem of microgrid state estimation is justified. An autonomous single bus microgrid consists of renewable energy sources (RESs), ener gy storage systems (ESSs), po wer electronic conv erters and loads. T wo types of power systems can be used for the microgrid implementation, DC (Direct Current) and A C (Alternating Current) systems. Each of these systems are dynamic processes that can be modeled as a system of differential equations, either linear or non-linear . As any other types of dynamic systems, each process has inputs, outputs and the internal state variables. The set of measurements av ailable for state estimation in this paper is assumed as: A C microgrid v i ∈ V , RMS voltage of buses p i ∈ P, Active po wer injected into each bus q i ∈ Q, Reactive po wer injected into each bus (1) DC microgrid v i ∈ V , RMS voltage of buses i i ∈ I , Injected current into each bus (2) For A C microgrids, other variables can be chosen such as phase of v oltage, but as phasor measurement units are expen- siv e and need high speed synchronization, indirect methods with active and reactive po wer are recommended and used. I I I . P RO P O S E D E S T I M AT I O N A R C H I T E C T U R E Fig. 1 shows the structure of the proposed ev ent-based state estimator . It consists of three parts, ev ent-based adapti ve Kalman state estimator , e vent-based signal conditioner and the mean square error (MSE) comparator . The microgrid estima- tion input variables, defined in Section II, are sampled with send-on-delta (SoD) measurement approach. The proposed ev ent-based Kalman filter works based on the knowledge that the signals between each ev ents are bounded by the δ threshold of SoD sampler . The proposed signal conditioner , reconstructs the original signal based on the events using the projection onto con vex sets algorithm (POCS), which is mainly used in literature as a promising approach for low quality image reconstruction. Finally the MSE comparator , decides on updating the state estimator based on the error between reconstructed signal and the predicted output of Kalman filter . I V . E V E N T - B A S E D K A L M A N F I LT E R D E S I G N By mapping the microgrid variables into the follo wing dy- namic system which is the state space realization the microgrid dynamics, the state estimation problem is formulated as: ˙ x = Ax ( t ) + w ( t ) y ( t ) = C x ( t ) + v ( t ) (3) where x ∈ R n is the estimated state and y ∈ R p is the output measurement. The process noise w ( t ) and measurement noise E vent-T ri gg ered Kalman Sta te Estima tor V oltage and Current Eve nt-Based Measurements POCS-Based Signal Recons truction MSE Compar ator Estimated Sta te Estimated Output Reconstruct ed Measurements Correction to Measurement Fig. 1. Structure of the proposed e vent-based optimal state estimator . v ( t ) are the uncorrelated, zero-mean white Gaussian random processes, satisfying the following assumptions: E { w ( t ) w ( s ) 0 } = Q δ ( t − s ) (4) E { v ( t ) v ( s ) 0 } = R δ ( t − s ) (5) E w i ( t ) v j ( s ) 0 = 0 , 1 ≤ i ≤ n, 1 ≤ j ≤ p (6) where w i and v j are the i -th and j -th elements of the w and v , respectiv ely . Also, R is the measurement noise co variance, and Q is the process noise cov ariance. It is presumed that the i -th sensor only transmits the data when the difference between the current sensor v alue and the previously transmitted value is greater than δ i . The states are also estimated periodically with the period of T . For simplicity , it is assumed that there is no delay in the sensor data transmission. Using the SoD method [17], the estimator continuously samples the a vailable data with a period of T from the sensors. For example, if the last received i -th sensor v alue is y i at the time t last,i , and there is no i -th sensor data receiv ed for t > t last,i , then the estimator can estimate y i ( t ) as: y i ( t last,i ) − δ i ≤ y i ( t ) ≤ y i ( t last,i ) + δ i (7) The last receiv ed i -th sensor data is used to compute the output y computed,i ev en if there is no sensor data transmission: y computed,i ( t ) = y i ( t last,i ) = C i x ( t ) + v i ( t ) + ∆ i ( t, t last,i ) (8) where ∆ i ( t, t last,i ) = y i ( t last,i ) − y i ( t ) and: | ∆ i ( t, t last,i ) | ≤ δ i (9) In (8), the measured v alue deviation increases from v i ( t ) to v i ( t ) + ∆ i ( t, t last,i ) . If ∆ i ( t, t last,i ) is assumed to hav e the uniform distribution with (9), then the variance of ∆ i ( t, t last,i ) is (2 × δ ) 2 i 12 , which is added to the measur ement noise covariance matrix , R ( i, i ) , in the Kalman filter . Algorithm f or the SoD-based Kalman filter: An algorithm is proposed here to appropriately improve the measur ement update part of the standard Kalman filter algorithm, which is adapted to the SoD e vent-generation condition by increasing the measurement noise covariance R k : 1) Initialization set ˆ x − (0) , P − 0 y last = C ˆ x − (0) (10) 2) Measurement update R k = R (11) if i -th measurement data are recei ved ˆ y last,i = y i ( k T ) (12) else R k ( i, i ) = R k ( i, i ) + (2 × δ ) 2 i 12 (13) end if K k = P − k C 0 ( C P − k C 0 + R k ) − 1 ˆ x ( k T ) = ˆ x − ( k T ) + K k ( ˆ y last − C ˆ x − ( k T )) P k = ( I − K k C ) P − k (14) 3) Project ahead ˆ x − (( k + 1) T ) = exp ( AT ) ˆ x ( k T ) P − k +1 = exp ( AT ) P k exp ( A 0 T ) + Q d (15) where Q d is the process noise co variance for the discretized dynamic system; y last is defined as (16): y last = [ y last, 1 , y last, 2 , . . . , y last,p ] 0 (16) The presented ev ent-triggered Kalman filter can also be em- ployed to implement the distrib uted controllers and estimators in networked control systems. F or further details on the de- velopment procedure and con ver gamce analysis, one can refer to [1]. It should be noted that in the proposed ev ent-triggered observer , con vergence is obtained by using the Kalman optimal observer . Howe ver , choosing lower v alues of δ i would result in the considerable reduction of the con vergence time [17]. V . S I G N A L R E C O N S T RU C T I O N F O R M U L A T I O N A N D E S T I M A T O R U P D A T E R U L E By using the SoD sampler , the input signal represents the time instants when the real signal has changed more than the specified δ value but also includes the fact that the signal stays in the region around the last sampled bounded by δ . This additional information on the signal is considered as the implicit data in the sampled signal, which forms the optimization problem for signal reconstruction. Therefore, the samples provide the information of discrete-time equality constraints specified by the input signal, the additional implicit information makes of continuous time inequality constraints. In this paper, the technique of Projection Onto Con vex Sets (POCS) for bandwidth limited signal reconstruction from SoD samples, is proposed to optimally reconstruct the microgrid measurement signals with a lo w computation cost in real-time. The POCS method was pre viously used for signal recovery from nonuniform samples [18], and for image reconstruction from lev el crossings [19], [20]. Send-on-Delta sampling is generalization of lev el-cross sampling, that considers the initial condition of the signal. This paper has extended the results of le vel-crossing sampling from [16] to support send-on-delta sampling, which the readers are referred to for more details on conv ex optimization and projection algorithms. A. Implicit Information of Send-on-Delta Sampled Signal Send-on-Delta sampling is a type of event-based sampling, where each e vent shows a crossing of the signal x ( t ) from a one dimensional re gion bounded by δ around the last sample. The event time instants t n ∈ Z , n ∈ Z are defined as: t n = min { t > t n − 1 , x ( t ) − x ( t n − 1 ) > δ } (17) The output of SoD sampler is the sequence of pairs ( t n , x ( t n )) . The set of possible samples by assuming zero initial conditions is X e = { x ( t 0 ) , x ( t 1 ) , x ( t 2 ) , . . . , x ( t n ) } . In order to formulate the con vex optimization problem, a conv ex region for the possible range reconstructed signals is defined according to (17): θ − ( t ) ≤ x ( t ) < θ + ( t ) (18) where θ − ( t ) and θ − ( t ) are the piecewise constant lower and upper bound respectively created from the follo wing constraints: θ − ( t ) = { r ∈ R , r = x ( k ) − δ, k ∈ t n } θ + ( t ) = { r ∈ R , r = x ( k ) + δ, k ∈ t n } (19) W ith this definition, the sign of the signal slope at the e vent instants ( t n )is defined as: S ( t n ) = ( x ( t n ) − x ( t n − 1 ) , x ( t n ) 6 = x ( t n − 1 ) S ( t n − 1 ) , x ( t n ) = x ( t n − 1 ) (20) By using the previous definitions, the samples values along with the implicit information mathematically takes the form of sets membership. Therefore the solution for the reconstructed signal x ( t ) will fall into the following con vex sets ( C ( R ) denotes continuous function): 1) From the explicit information: ξ = { u ( t ) ∈ C ( R ) : u ( t n ) = x ( t n ) for all n ∈ Z } (21) 2) From the implicit information: I = { u ( t ) ∈ C ( R ) : θ − ≤ u ( t ) < θ + ( t ) for all t ∈ R } (22) 3) From the knowledge that the signal is band-limited with maximum frequency Ω B = { u ( t ) ∈ L 2 ( R ) : ∀| w | (23) The set B is con ve x as the band-limited signals form a linear space. For the sets I and ξ , [16] provides the proof of con vex- ity . The reconstructed signal should be a member of the set ξ ∩ I ∩ B as the constraint of the optimization. This constraint is usually wide that finding the optimal answer takes more computation. Fortunately , because θ − ( t ) ≤ x ( t ) < θ + ( t ) , one can easily deriv e that I ⊂ ξ . Therefore, the constraint is limited to the boundary defined by I ∩ B , which needs less computations for the task of real-time signal estimation. B. Pr ojection onto Con vex Sets Signal Reconstruction In order to solve the problem of POCS, two methods are proposed in literature, one-step projection and iterativ e projection. For the more detailed discussion of the mentioned methods, [16] provides a good starting point. In this paper , as we are building a real-time e vent-based state estimator for microgrids, the later method of iterati ve projection onto con vex sets is employed, which poses less computation with the price of losing a negligible precision. The basic idea behind iterativ e POCS is that by having two or more con vex sets, on each iteration the initial solution is projected to one of them. Therefore, by iterati vely repeating the projection to the sets, the initial guess gets closer to the optimal answer . The projection of the a signal g onto a continuous conv ex set C will be another signal ˆ x ( t ) which is closest to signal g : ˆ x = P C g = arg min y ∈ C || g − y || (24) where the projection P C g is closer to any vector y ∈ C than g: || P C g − x || < || g − y || (25) For the e vent-based signal reconstruction problem, the initial guess ˆ x 0 should be first projected onto conv ex set B with the following projection operator: P B g ( t ) = ˆ x ( t ) ∗ Ω π sinc (Ω t ) = Z ∞ −∞ ˆ x ( τ ) Ω π sinc (Ω( t − τ )) dτ (26) having defined sinc ( y ) = sin ( y ) y . The projection operator onto con vex set I for clipping the signal to bound defined by θ is: P I g ( t ) = θ + ( t ) , ˆ x ( t ) > θ + ( t ) ˆ x ( t ) , θ − ( t ) ≤ ˆ x ( t ) < θ + ( t ) θ − ( t ) , ˆ x ( t ) < θ − ( t ) (27) Finally , by applying the operator for both projections, the desired accuracy of signal reconstruction will be achiev ed: ˆ x m +1 = P B g P I g ˆ x m , m ∈ Z (28) Fig. 2. Interface of measurement nodes with the real-time simulator. The stopping condition for the number of iterations is ap- plication dependent, related to the accurac y needed for signal reconstruction. In this paper, experimentally we ha ve chosen a value of 10 iterations, which provided a high accuracy . C. Estimator Update Rule of Mean-Squar e Err or Comparator The measurement signals from the sensors include lev els of noise. Here in this paper, the noise type is considered as deriv ativ e of the Brownian motion (white or Gaussian noise). The ev ent-triggered sampling of a signal with Gaussian noise generally leads to a non-Gaussian stochastic process, and therefore degrades the estimation accuracy and con ver gence of linear state estimators, such as the proposed ev ent-triggered Kalman filter . Here we propose an estimator update rule that based the comparison of the reconstructed signal and the output of the Kalman filter , applies corrections to the measurements. The correction is an offset, that is added in the first stage of state estimator as described in the following: y i ( t last,i ) = y i ( k T ) , || y i predict − y i construct < δ || y i construct ( k T ) , || y i predict − y i construct ≥ δ || (29) where y i predict and y i construct are the output of the signal re- constructor and the event-triggered Kalman filter, respectiv ely . V I . D E V E L O P E D S E T U P F O R E S T I M A T O R V A L I D A T I O N In order to v alidate the proposed e vent-based state estimator , an IoT setup consists of se veral nodes supporting long range wide area network (LoRaW AN) communication protocol is designed using Seeeduino R LoRaW AN nodes and a real-time microgrid simulator from dSP A CE R (Microlabbox DS1202). The nodes are connected to the real-time simulator via the BNC connectors that can be both Analog Outputs and Analog Inputs. The schematic of the setup is shown in Fig. 2. The real-time simulator allo ws the testing of different microgrid operation scenarios with only changing the simulation config- uration in Matlab/Simulink software. Thingsboard SA server Collect and visualise data Device management Process and react Data relay and team SA Fig. 3. Network architecture for microgrids based on the IoT protocols. Since microgrids will be installed in pri vate urban or rural areas, the monitoring software should be accessible easily by the operators, and also a well-designed human machine interface (HMI) is essential, in order to achiev e the adequate situational awareness. In this work, the Thingsboard R open- source software is used as the operator dashboard that shows the estimated state of the microgrid to the operator . Things- board is a web-based dashboard designer written in Jav a which provides different widgets to visualize the v alues receiv ed from the measurement nodes. The LoRaW AN protocol necessitates a gateway to be em- ployed for the data collection and distribution. In this setup, a Raspberry Pi with the supporting communication module for the gatew ay operation is used. This gate way conv erts the receiv ed data from LoRaW AN nodes and transforms them into MQTT (Message Queuing T elemetry Transport) payloads which are transmitted to the MQTT broker . Thingsboard IoT software provides the MQTT broker which in this work is employed for data processing and archi ving. The data collec- tion architecture for the proposed microgrid state estimator platform based on the IoT protocols is shown in Fig. 3. By using the mentioned protocols and devices, the cost of monitoring of microgrid is considerably reduced. The dev el- oped hardware setup is comparably more affordable than the existing monitoring de vices, which makes it an ideal choice for the big data collection and processing in smart grid. The software stack de veloped for this de vice, fully supports the Arduino R integrated development environment (IDE). Many libraries are de veloped for the Arduino that can be used seamlessly in this device. In addition, the battery life is extended due to the event-based communication. Hence, lower rating batteries can be used that leads to more cost reduction. V I I . R E S U L T S A N D D I S C U S S I O N In order to ev aluate the proposed state estimation approach, in this section, an example microgrid model [1] (canonical form), is simulated based on the dev eloped data collection platform, defined as: ˙ x = 0 1 0 0 0 0 1 0 0 0 0 1 − 1 − 6 − 35 . 5 − 15 x + w y = − 2 4 0 3 0 10 0 1 x + v (30) The state of the microgrid is denoted by the vector x ( t ) = [ x 1 ( t ) T , x 2 ( t ) T , x 3 ( t ) T , x 4 ( t ) T ] , and the initial conditions are set as x 0 = [10 , 3 , − 4 , 5] . The parameters of the proposed state estimator for the simulation are provided in T able I. The results are compared with the traditional Kalman filter and the superior performance of the proposed estimator is validated. The simulated system has two outputs and the number of ev ents generated for each output based on SoD sampling is 34 and 84 events for a duration of 40 seconds. This shows that with the small number of samples comparing to the time-triggered traditional Kalman filter , the estimator has achiev ed a better performance, as can be seen in the figures. Fig. 4 to Fig. 7 sho w the estimated state and the estimation error for both the proposed event-based estimator and the traditional Kalman filter . One can see that the estimation error is considerably lower . From the experimental point of vie w , there are limitations in the LoRaW AN communication network that may degrade the estimation accuracy . LoRaW AN protocol introduces a con- siderable delay of seconds to the transmission of the messages when the number of messages in a specific time, goes higher than the capability of the network. The number of message is related to the threshold δ of the SoD sampler , therefore a well designed tuning algorithm should be dev eloped in order to relate the estimation error , SoD threshold and number of ev ents. A delay compensated strategy would also solve this issue, which is part the future research in this paper . T ABLE I S I MU L A T I ON PA RA M E T ER S O F T H E S TA T E E S T IM ATO R . δ (SoD threshold) 6 Q (Process Noise Cov ariance) 0.1 R (Measurement Noise Covariance) 0.36 T (Estimator Cycle T ime) 100 microseconds V I I I . C O N C L U S I O N This paper presented an optimal event-triggered state esti- mator for microgrids with the corresponding data collection architecture. A setup has been dev eloped, which provides high performance data collection/estimation capabilities from smart meters. It has been sho wn that by using the dev eloped estimation strategy , an adequate le vel of situational awareness can be achieved with lo wer installation and communication costs. Also the criteria for SoD sampling is justified, using ev ent-based POCS signal reconstruction technique. In future, energy storages state of charge (SoC) will be also considered in the estimation problem, using the proposed technique. 0 10 20 30 40 Time (seconds) -10 -5 0 5 10 15 State x1 of the system actual state Kalman filter proposed estimator 0 10 20 30 40 Time (seconds) 0 1 2 3 4 5 6 Absolute Error of State x1 Kalman filter proposed estimator Fig. 4. Simulation result for state x1 and error comparison 0 10 20 30 40 Time (seconds) -8 -6 -4 -2 0 2 4 6 State x2 of the system actual state Kalman filter proposed estimator 0 10 20 30 40 Time (seconds) 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 Absolute Error of State x2 Kalman filter proposed estimator Fig. 5. Simulation result for state x2 and error comparison 0 10 20 30 40 Time (seconds) -4 -3 -2 -1 0 1 2 3 4 State x3 of the system actual state Kalman filter proposed estimator 0 10 20 30 40 Time (seconds) 0 0.5 1 1.5 2 Absolute Error of State x3 Kalman filter proposed estimator Fig. 6. Simulation result for state x3 and error comparison R E F E R E N C E S [1] S. A. Alavi, K. Mehran, Y . Hao, A. Rahimian, H. Mirsaeedi, and V . V ahidinasab, “A Distributed Event-T riggered Control Strategy for DC Microgrids Based on Publish-Subscribe Model Over Industrial Wireless Sensor Networks, ” IEEE T rans. Smart Grid , 2018. [2] S. Parhizi, H. Lotfi, A. Khodaei, and S. Bahramirad, “State of the art in research on microgrids: A review, ” IEEE Access , vol. 3, pp. 890–925, 2015. [3] B. Qin, H. Sun, J. Ma, W . Li, T . Ding, Z. W ang, and A. Zomaya, “Robust Control of Doubly Fed W ind Generator V ia State-Dependent Riccati Equation T echnique, ” IEEE T rans. P ower Syst. , pp. 1–1, 2019. 0 10 20 30 40 Time (seconds) -3 -2 -1 0 1 2 3 State x4 of the system actual state Kalman filter proposed estimator 0 10 20 30 40 Time (seconds) 0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 Absolute Error of State x4 Kalman filter proposed estimator Fig. 7. Simulation result for state x4 and error comparison [4] S. A. Alavi, M. Javadipour , and K. Mehran, “State Monitoring for Situational A wareness in Rural Microgrids Using the IoT Infrastructure, ” arXiv Pr epr . arXiv1906.00437 , Jun. 2019. [5] E. Ghahremani and I. Kamwa, “Local and W ide-Area PMU-Based Decentralized Dynamic State Estimation in Multi-Machine Power Sys- tems, ” IEEE T rans. P ower Syst. , vol. 31, no. 1, pp. 547–562, Jan. 2016. [6] M. H. Amini, H. Arasteh, and P . Siano, “Sustainable Smart Cities Through the Lens of Complex Interdependent Infrastructures: Panorama and State-of-the-art. ” Springer , Cham, 2019, pp. 45–68. [7] S. A. Alavi, A. Rahimian, K. Mehran, and J. M. Ardestani, “An IoT -based data collection platform for situational awareness-centric microgrids, ” in IEEE Can. Conf. Electr . Comput. Eng. , 2018, pp. 1–4. [8] A. Primadianto and C.-N. Lu, “A Revie w on Distribution System State Estimation, ” IEEE T rans. P ower Syst. , vol. 32, no. 5, pp. 3875–3883, Sep. 2017. [9] D. P . Spanos, R. Olfati-saber, and R. M. Murray , “Dynamic consensus for mobile networks, ” in 16th Int. F ed. Aut. Contr ol , 2005, pp. 1–6. [10] A. Zohaib, S. A. Alavi, and K. Mehran, “V oltage control in L V networks using electric springs with coordination, ” in IEEE Can. Conf. Electr . Comput. Eng . , 2018, pp. 1–5. [11] M. H. Amini, K. G. Boroojeni, S. S. Iyengar, P . M. P ardalos, F . Blaab- jerg, and A. M. Madni, Eds., Sustainable Interdependent Networks II , ser . Studies in Systems, Decision and Control. Cham: Springer International Publishing, 2019, vol. 186. [12] A. Abessi, V . V ahidinasab, and M. S. Ghazizadeh, “Centralized support distributed voltage control by using end-users as reactiv e po wer support, ” IEEE T rans. Smart Grid , vol. 7, no. 1, pp. 178–188, Jan. 2016. [13] Y . Sakurai, K. T akada, M. Anisetti, V . Bellandi, P . Cerav olo, E. Damiani, and S. Tsuruta, “T o ward sensor-based context aware systems, ” Sensors , vol. 12, no. 1, pp. 632–649, Jan. 2012. [14] A. Anta and P . T abuada, “T o sample or not to sample: Self-triggered control for nonlinear systems, ” IEEE T rans. Autom. Contr ol , vol. 55, no. 9, pp. 2030–2042, Sep. 2010. [15] V . C. G ¨ ung ¨ or , D. Sahin, T . Kocak, S. Erg ¨ ut, C. Buccella, C. Cecati, and G. P . Hancke, “Smart grid technologies: Communication technologies and standards, ” IEEE Tr ans. Ind. Informatics , vol. 7, no. 4, pp. 529–539, Nov . 2011. [16] D. Rzepka, M. Miskowicz, D. K oscielnik, and N. T . Thao, “Re- construction of Signals From Level-Crossing Samples Using Implicit Information, ” IEEE Access , vol. 6, pp. 35 001–35 011, 2018. [17] W . Li, J. Du, and Y . Jia, “Event-triggered Kalman consensus filter over sensor networks, ” IET Contr ol Theory Appl. , vol. 10, no. 1, pp. 103–110, Jan. 2016. [18] S.-j. Y eh and H. Stark, “Iterati ve and one-step reconstruction from nonuniform samples by conve x projections, ” J . Opt. Soc. Am. A , v ol. 7, no. 3, p. 491, Mar . 1990. [19] A. Zakhor and A. Oppenheim, “Reconstruction of two-dimensional signals from level crossings, ” Pr oc. IEEE , vol. 78, no. 1, pp. 31–55, 1990. [20] Y ik-Hing Fung and Y uk-Hee Chan, “A POCS-based restoration al- gorithm for restoring halftoned color-quantized images, ” IEEE T rans. Image Process. , vol. 15, no. 7, pp. 1985–1992, Jul. 2006.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment