Delay-Dependent Output-Feedback Control for Blood Pressure Regulation Using LPV Techniques
This paper presents a delay-dependent parameter-varying control design approach to address the automated blood pressure regulation problem in the critical patient resuscitation using closed-loop administration of vasopressors. The mean arterial press…
Authors: Shahin Tasoujian, Karolos Grigoriadis, Matthew Franchek
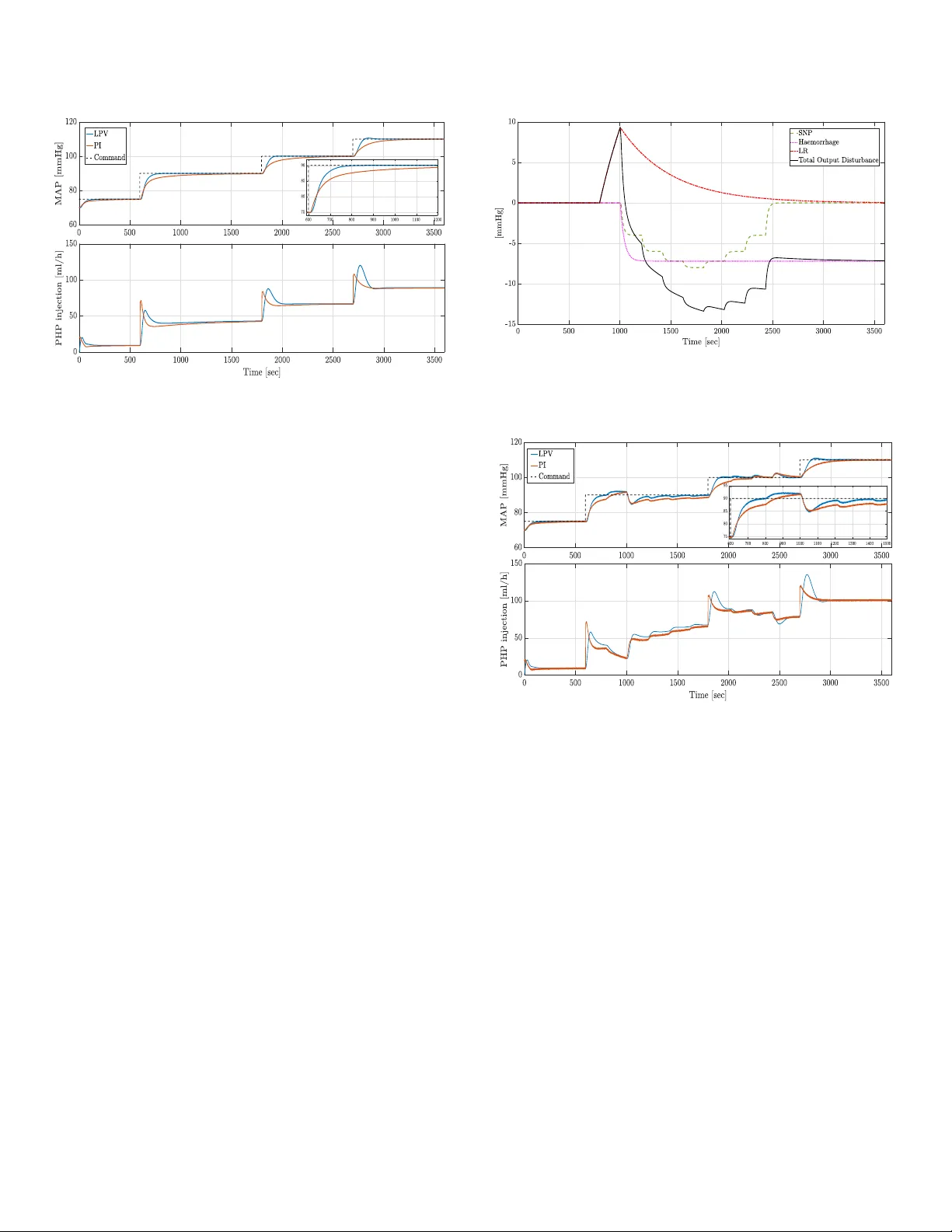
Proceedings of the ASME 2019 Dynamic Systems and Control Conference DSCC2019 October 8-11, 2019, Park City , UT , USA DSCC2019-9098 DELA Y-DEPENDENT OUTPUT -FEEDB A CK CONTROL FOR BLOOD PRESSURE REGULA TION USING LPV TECHNIQUES Shahin T asoujian ∗ , Karolos Grigoriadis, and Matthew Franchek Depar tment of Mechanical Engineer ing University of Houston Houston, T e xas 77204 Email: stasoujian@uh.edu ABSTRA CT This paper pr esents a delay-dependent par ameter-varying contr ol design appr oach to addr ess the automated blood pr es- sur e r e gulation pr oblem in the critical patient resuscitation using closed-loop administration of vasopr essors. The mean arterial pr essur e (MAP) r esponse of a patient subject to the intravenous vasoactive drug tr eatment is modeled as a linear par ameter- varying (LPV) model, wher e varying model parameter s and varying time-delay ar e considered as scheduling parameters of the system. P arameter-dependent L yapunov-Krasovskii function- als are used to design an output-feedback dynamic contr oller to satisfy the closed-loop stability and r efer ence MAP tr acking re- quir ements. The synthesis conditions ar e formulated in terms of Linear Matrix Inequalities (LMIs) that characterize the induced L 2 -norm performance specification of the closed-loop system. The main objectives of the proposed contr ol method in the pr es- ence of limitations posed by the time-varying model parameters and the large time-varying delay ar e to track the MAP refer ence command and maintain the blood pr essur e within the permissi- ble r ange of commanded set-point, avoid undesirable over shoot and slow r esponse, and to pr o vide a smooth drug injection. Fi- nally , to evaluate the performance of the pr oposed LPV blood pr essur e r e gulation appr oac h, closed-loop simulations ar e con- ducted and the results confirm the effectiveness of the pr oposed contr ol method against various simulated scenarios. ∗ Shahin T asoujian is a Ph.D. candidate in Mechanical Engineering at the Uni- versity of Houston, Houston, TX 77204, U.S.A. e-mail: stasoujian@uh.edu. K. Grigoriadis and M. Franchek are also with the Univ ersity of Houston. INTRODUCTION The cardiov ascular system can be seen as a h ydraulic system that circulates blood as its working fluid and it is characterized in terms of pressure and flow variability . The mean arterial blood pressure (MAP) re gulation of a patient to a desired target value is essential in man y clinical and operati ve procedures in emergenc y resuscitation. For this purpose, two types of v asoacti ve drugs are being used to attain a target MAP in emergenc y resuscita- tion: (1) vasodilator drug to decrease the MAP to a target value, like sodium nitroprusside (SNP) which reduces the tension in the blood vessel walls [1], (2) v asopressor drugs to increase the MAP to a target value, like phenylephrine (PHP) which stimulates the depressed cardiov ascular system causing v asoconstriction [2]. T ypically , MAP control and regulation procedures in clin- ical care are carried out manually using a syringe or infusion pump with a manual titration by the medical personnel. In these cases, drug delivery and adjustment may not be precisely man- aged, which can lead to undesirable or potentially fatal conse- quences, such as, increased cardiac workload and cardiac arrest. Moreov er , manual drug administration is a time-consuming and labor-intensi ve task and often is challenged by poor and slug- gish performance. Further , inaccurate operator monitoring can lead to under- or over -resuscitation with potentially dangerous outcomes [3]. Accordingly , the automation of vasoacti ve drug infusion via feedback control has been proposed as a potential remedy to tackle the mentioned challenges of manual drug ad- ministration. Automated administration and accurate dosing of the intra- 1 Copyright c 2019 by ASME venous drug is still a challenging problem mostly due to the phar- macological response variability of patients. There are consider- able intra-patient and inter-patient v ariations in the physiologi- cal MAP response to the drug infusion [4]. Moreover , the MAP response has a large varying time-delay , which poses significant limitations to the control design process. Therefore, the designed control system should be robust against the comple x physiologi- cal variations and disturbances and also be able to adapt to vary- ing patient response and large v arying time-delay . T ime delay and especially lar ge varying time delay presence considerably complicates the control design procedure and in- troduces instability and performance deterioration to the feed- back system [5]. Stability analysis and control of time-delay systems has been the subject of research in recent decades and is classified into two general directions; namely , delay-independent and delay-dependent approaches [6]. The delay-independent sta- bilization criteria are based on conditions that are independent of the size of the delay and the controller is designed regard- less of the time delay magnitude, which leads to more conser- vati ve results especially for cases with small time delays ( e.g. see [7]). On the other hand, the delay-dependent approaches re- sult in less conservati v e analysis and guarantee the stability and the prescribed performance of the system by considering all the delays smaller than a certain determined upper bound. In re- cent years, there ha ve been considerable efforts to in vestigate the stability of time-delay systems using delay-dependent stabiliza- tion criteria ( e.g . see [8–10]). Delay-dependent approaches typi- cally utilize L yapuno v-Krasovskii functionals [11] or L yapunov- Razumnikhin functions [12] for the stability analysis and control synthesis. The main challenge associated with the MAP regulation problem stems from the physiological and pharmacological v ari- ations of the considered system as well as its large varying time-delay , that restrict the application of con ventional and time- in v ariant control techniques. Rob ust control methods treat the variations in the plant dynamics as uncertainties and employ time-in v ariant methods which leads to considerably conservati ve results [13, 14]. Early gain-scheduling control design approaches were based on interpolation, and despite their time-varying na- ture which adjusts for the system v ariations, they fail to pro- vide any guarantee for asymptotic stability and/or performance of the time-varying closed-loop system. In this regard, the ne- cessity to design g ain-scheduled controllers with guaranteed sta- bility and performance with less conserv ati ve results has led to the advent of linear parameter varying (LPV) gain-scheduling synthesis [15]. LPV systems encompass linear systems whose dynamics de- pend on time-varying parameters known as scheduling param- eters. For the present case study , in order to utilize the pro- posed output-feedback LPV control framew ork, an LPV time- delay system formulation is dev eloped to describe the patient’ s MAP response to vasoacti ve drugs, where the system is a func- tion of observable scheduling parameters. Stability analysis and control of LPV systems without time delay has been inv esti- gated in the literature [16]. Time-delayed LPV systems where the time-varying delay is a function of the scheduling parame- ter are ubiquitous in engineering and the analysis and the con- trol synthesis of those has been an interesting research topic in the past decade. One simple b ut conservati ve approach in deal- ing with time-delayed systems is using the Pad ´ e approximation to transform the infinite-dimensional delay problem into a finite- dimensional non-minimum phase (NMP) system, follo wed by an LPV control design for a non-delay system [17, 18]. A common direct approach in analyzing LPV systems with time delay is to transfer the delay appearing in the input to the state. Such a sys- tem is called LPV state-delayed systems and has been addressed widely in the literature [17, 19]. In most of the control design methods for time-delayed LPV systems, L yapuno v-Krasovskii functionals are considered (see, e.g. [19]). In these studies, the delay variation rate is not taken into account, which resulted in conservati ve results. In the present paper , we utilize parameter-dependent L yapunov-Krasovskii functionals to examine the stability and the tracking performance of the closed-loop system, which leads to a delay-dependent synthesis method that can handle arbitrary pa- rameter v ariations. Accordingly , an LPV output-feedback con- troller is designed to track a desired MAP reference and mini- mize the ef fect of disturbances. For control validation purposes, collected animal experiment data and a non-linear patient sim- ulation model are utilized to capture the varying physiological characteristics of a patient’ s MAP response [17]. The proposed approach is ev aluated in computer simulations and compared to the results of a conv entional fixed g ain proportional integral (PI) controller which has been validated e xperimentally (see [20]). The notation to be used in the paper is standard and as fol- lows: R denotes the set of real numbers, R + is the set of non- negati ve real numbers, R n and R k × m are used to denote the set of real vectors of dimension n and the set of real k × m matrices, respectiv ely . M 0 sho ws the positiv e definiteness of the matrix M and the transpose of a real matrix M is shown as M T . Also, S n and S n ++ denote the set of real symmetric and real symmetric positiv e definite n × n matrices, respecti vely . In a symmetric ma- trix, the asterisk ? in the ( i , j ) element denotes transpose of ( j , i ) element. C ( J , K ) denotes the set of continuous functions from a set J to a set K . The outline of the paper is as follows. Section 3 introduces a simplified mathematical representation of the studied MAP re- sponse dynamics follo wed by the control design objectiv es. In section 4, the LPV model of patients’ MAP response is presented and LPV gain-scheduling control design is introduced. Section 5 will outline closed-loop results and ev aluate the performance of the proposed LPV controller in the computer simulation en vi- ronment. Finally , section 6 will conclude the paper . 2 Copyright c 2019 by ASME MAP DRUG RESPONSE MODEL In the present study , we consider a first-order model with a time-delay to describe the patient’ s MAP response to the infusion of a vasoacti ve drug, such as PHP , i.e. G p ( s ) = ∆ M AP ( s ) U ( s ) = K T s + 1 e − τ s , (1) where ∆ M AP stands for the MAP variations in mmHg from its baseline value, i.e. ∆ M AP ( t ) = M AP ( t ) − M AP b , U is the drug infusion rate in ml/h , K denotes the patient’ s sensitivity to the drug, T is the lag time representing the uptake, distribution, and biotransformation of the drug [21], and τ is the time de- lay for the drug to reach the circulatory system from the infu- sion pump. This first-order model seems to properly capture a patient’ s physiological response to the PHP drug injection. Fig- ure 1 shows a typical MAP response to the step PHP infusion versus a matched response of the considered model (1). Data is collected from swine e xperiments performed at the Resuscitation Research Laboratory of the Univ ersity of T exas Medical Branch (UTMB), Galveston, T exas [10]. Although the proposed model structure (1) is qualitativ ely able to represent the characteristics of the MAP response to the infusion of PHP , the model parame- ters vary considerably ov er time due to the v ariability of patients’ pharmacological response to the v asoacti ve drug infusion. That is, the model parameters and delay could v ary significantly from patient-to-patient (inter -patient variability), as well as, for a gi ven patient ov er time (intra-patient variability) [21, 22]. Thus, these variations cause the model parameters K , T , and τ to be time- varying and a priori unkno wn. The designed controller should be able to guarantee stabil- ity and tracking performance despite these v ariations. The main purpose of this work is to design such a controller to automati- cally regulate the blood pressure to a target v alue and maintain hemodynamic stability in hypotensi ve patients in the presence of lar ge time-v arying delay and model parameter variability by means of the closed-loop administration of the vasopressor drug, PHP . The following section, firstly , presents an LPV model for the patient’ s MAP response and then, a delay-dependent output- feedback control strategy is designed to satisfy the prescribed closed-loop stability and reference tracking performance. LPV MODELING AND LPV GAIN-SCHEDULING CON- TROL DESIGN In order to apply the linear parameter varying (LPV) con- trol strategy to the MAP regulation problem, the MAP response model (1) is formulated as an LPV time-delay model, where the model parameters are continuously a v ailable for the controller as scheduling parameters. The structure of the closed-loop system with the LPV controller is shown in Fig. 2. FIGURE 1 . T ypical MAP response due to step PHP drug infusion LPV Controller P atient P arameter Generation y ∗ ( t ) + e ( t ) u ( t ) + y − K T τ d ( t ) + FIGURE 2 . Closed-loop system structure MAP Drug Response LPV Modeling W e consider (1) as a first-order model with time-delay to capture patients’ MAP response dynamics to the PHP infusion and its equiv alent time-domain representation as T · ˙ ∆ M AP ( t ) + ∆ M AP ( t ) = K · u ( t − τ ) . (2) By considering the state v ariable as x ( t ) = ∆ M AP ( t ) , we can rewrite the state space representation of the first-order time- delayed MAP response model as follows ˙ x ( t ) = − 1 T x ( t ) + K T u ( t − τ ) , y ( t ) = x ( t ) + d o ( t ) , (3) where y ( t ) is the patient’ s measured MAP response and d o ( t ) de- notes output disturbance. In (3), the varying time delay τ = τ ( t ) is appearing in the input signal and in order to utilize the pro- posed time-delay LPV control design framework, we need to transform the input-delay system into a state-delay LPV repre- sentation. T o this end, we introduce a filtered input signal u a ( t ) 3 Copyright c 2019 by ASME as follows u ( s ) = Ω s + Λ u a ( s ) , (4) where Ω and Λ are positive scalars that are selected based on the bandwidth of the actuators. By considering the augmented state vector x T a = [ x u x e ] T , and defining the scheduling parame- ter v ector , ρ ( t ) = [ K ( t ) T ( t ) τ ( t ) ] T , the LPV state-delayed state- space representation of the MAP response dynamics takes the following form ˙ x a ( t ) = A ( ρ ( t )) x a ( t ) + A d ( ρ ( t )) x a ( t − τ ( t )) + B 1 ( ρ ( t )) w ( t ) + B 2 ( ρ ( t )) u ( t ) y a ( t ) = C 2 ( ρ ( t )) x a ( t ) + C 2 d ( ρ ( t )) x a ( t − τ ( t )) + D 21 ( ρ ( t )) w ( t ) , (5) where the exogenous disturbance vector w ( t ) = [ r ( t ) d o ( t ) ] T includes the reference command and output disturbance. The third state is defined for the command tracking purposes, i.e. ˙ x e ( t ) = e ( t ) = r ( t ) − y ( t ) = r ( t ) − ( x ( t ) + d o ( t )) . Thus, the state space matrices of the augmented LPV system (5) are obtained as A ( ρ ( t )) = − 1 T ( t ) 0 0 0 − Λ 0 − 1 0 0 , A d ( ρ ( t )) = 0 K ( t ) T ( t ) 0 0 0 0 0 0 0 , B 1 ( ρ ( t )) = 0 0 0 0 1 − 1 , B 2 ( ρ ( t )) = 0 Ω 0 , C 2 ( ρ ( t )) = 1 0 0 , D 21 ( ρ ( t )) = 0 1 , (6) and C 2 d ( ρ ( t )) is a zero matrix with compatible dimensions. Now , by having an appropriate LPV representation of the consid- ered MAP response model, the proposed LPV gain-scheduling synthesis is discussed in the following section. LPV Time-Delay Control Design Consider the follo wing state-space representation of an LPV system with a varying state delay ˙ x ( t ) = A ( ρ ( t )) x ( t ) + A d ( ρ ( t )) x ( t − τ ( t )) + B 1 ( ρ ( t )) w ( t ) + B 2 ( ρ ( t )) u ( t ) z ( t ) = C 1 ( ρ ( t )) x ( t ) + C 1 d ( ρ ( t )) x ( t − τ ( t )) + D 11 ( ρ ( t )) w ( t ) + D 12 ( ρ ( t )) u ( t ) y ( t ) = C 2 ( ρ ( t )) x ( t ) + C 2 d ( ρ ( t )) x ( t − τ ( t )) + D 21 ( ρ ( t )) w ( t ) , x ( θ ) = φ ( θ ) , ∀ θ ∈ [ − τ ( ρ ( 0 )) , 0 ] , (7) where x ( t ) ∈ R n is the system state vector , w ( t ) ∈ R n w is the vector of exogenous disturbances with finite energy in the space L 2 [ 0 , ∞ ] , u ( t ) ∈ R n u is the input vector , z ( t ) ∈ R n z is the vec- tor of outputs to be controlled, y ( t ) ∈ R n y is the vector of mea- surable outputs, φ ( · ) is the initial system condition, and τ is a differentiable scalar function representing the parameter -v arying time delay . In the present work, the delay is assumed bounded and the function τ lies in the set T defined as T : = { τ ∈ C ( R s , R ) : 0 ≤ τ ( t ) ≤ τ < ∞ , ∀ t ∈ R + } . (8) Also, the system’ s initial condition function, φ is a gi v en function in C ([ − τ 0 ] , R n ) . The notation x t ( θ ) refers to x ( t + θ ) for θ ∈ [ − τ 0 ] where x t is the infinite-dimensional state vector of the system. The presented state space matrices A ( · ) , A d ( · ) , B 1 ( · ) , B 2 ( · ) , C 1 ( · ) , C 1 d ( · ) , C 2 ( · ) , C 2 d ( · ) , D 11 ( · ) , D 12 ( · ) , and D 21 ( · ) are kno wn continuous functions of the time-varying parameter vector ρ ( · ) ∈ F ν P , where F ν P is the set of allo wable parameter trajectories defined as F ν P , { ρ ∈ C ( R + , R s ) : ρ ( t ) ∈ P , | ˙ ρ i ( t ) | ≤ ν i } , (9) wherein P is a compact subset of R s , i.e. , the parameter tra- jectories and parameter v ariation rates are assumed bounded as defined. Since the delay is considered to be dependent on the scheduling parameter vector ρ ( t ) , as a result, the delay bound should be incorporated into the parameter set F ν P . Moreover , in the present paper , L yapunov Krasovskii functionals are utilized to obtain less conservati ve results, which are valid for bounded parameter variation rates [16]. In the present work, we use an H ∞ design performance spec- ification for the closed-loop system. The induced L 2 -gain (or H ∞ norm) of the LPV system (7) from w ( t ) to z ( t ) is defined as k T zw k i , 2 = sup ρ ( t ) ∈ F ν P sup k w ( t ) k 2 6 = 0 k z ( t ) k 2 k w ( t ) k 2 . (10) 4 Copyright c 2019 by ASME where T zw is an operator mapping w ( t ) to z ( t ) , and k w ( t ) k 2 and k z ( t ) k 2 are the 2-norm of the exogenous input signal and desired controlled output vector , respectively . Considering the time-delay LPV system (7) and u ( t ) ≡ 0, the following theorem provides the sufficient condition that guaran- tees the asymptotic stability and the specified lev el of disturbance rejection performance in the H ∞ setting as defined in (10). Theorem 1. [19] The unfor ced time-delay LPV system (7) is asymptotically stable for all τ ∈ T and satisfies the condition k z ( t ) k 2 ≤ γ k w ( t ) k 2 , if there exists a continuously differ entiable matrix function P : R s → S n ++ , constant matrices Q , R ∈ S n ++ , and a scalar γ > 0 such that the following LMI condition holds for all ρ ∈ F ν P . ( 1 , 1 ) P A d + R PB 1 C T 1 τ A T R ? Ξ 22 0 C T 1 d τ A T d R ? ? − γ I D T 11 τ B T 1 R ? ? ? − γ I 0 ? ? ? ? − R ≺ 0 , (11) wher e ( 1 , 1 ) = A T P + P A + ∂ P ∂ ρ i ˙ ρ i + Q − R , and Ξ 22 = − 1 − ∂ τ ∂ ρ i ˙ ρ i Q − R and and the dependence on the scheduling param- eter has been dr opped for the clarity and simplicity . It should be noted that the parameter variation rate ˙ ρ , enters affinely in the LMIs in this paper , hence, it is enough to chec k LMI only at the vertices of ˙ ρ . As a r esult, ∂ P ∂ ρ i ˙ ρ i and ∂ τ ∂ ρ i ˙ ρ i ar e replaced by ∑ s i = 1 ± ν i ∂ P ∂ ρ i and ∑ s i = 1 ± ν i ∂ τ ∂ ρ i , r espectively . The standard matrix inequality characterization presented in Theorem 1 has multiple product terms of P A and RA , so it is not suitable to deriv e the synthesis conditions in which the closed- loop A matrix includes the unknown terms of the controller to be designed. T o overcome this challenge, a reciprocal variant of projection Lemma [19] is utilized to deri ve a relax ed con- dition. By using this approach, slack variables are introduced which bring more flexibility in the synthesis problem and lead to less conservati v e conditions. The following theorem presents a relaxed LMI condition using slack v ariables to guarantee the asymptotic stability and the specified le vel of performance in the H ∞ setting giv en in (10). Theorem 2. [19] The time-delay LPV system (7) when u ≡ 0 is asymptotically stable for all τ ∈ T and satisfies the condition k z ( t ) k 2 ≤ γ k w ( t ) k 2 , if there exists a continuously differ entiable matrix function P : R s → S n ++ , constant matrices Q , R ∈ S n ++ , matrix functions V 1 , V 2 , V 3 : R s → R n × n , and a scalar γ > 0 such that the following LMI condition holds for all ρ ∈ F ν P . − V 1 − V T 1 P − V T 2 + V 1 A − V T 3 + V 1 A d ? Ψ 22 + A T V T 2 + V 2 A R + A T V T 3 + V 2 A d ? ? Ξ 22 + A T d V T 3 + V 3 A d ? ? ? ? ? ? ? ? ? V 1 B 1 0 V 1 + τ R V 2 B 1 C T 1 V 2 − P V 3 B 1 C T 1 d V 3 − γ I D T 11 0 ? − γ I 0 ? ? ( − 1 − 2 τ ) R ≺ 0 , (12) wher e Ψ 22 = ∂ P ∂ ρ i ˙ ρ i + Q − R and Ξ 22 has been defined befor e . The analysis results presented in Theorem 2 are used to de- riv e a dynamic output feedback controller . In this paper , the time delay in the system dynamics has been considered to be known and measurable function of the scheduling parameter ρ . A full- order dynamic output-feedback controller in the following form is designed for the time-delay LPV system (7): ˙ x k ( t ) = A k ( ρ ) x k ( t ) + A d k ( ρ ) x k ( t − τ ( t )) + B k ( ρ ) y ( t ) , u ( t ) = C k ( ρ ) x k ( t ) + C d k ( ρ ) x k ( t − τ ( t )) + D k ( ρ ) y ( t ) , (13) where x k ( t ) ∈ R n is the controller state vector and x k ( t − τ ( t )) ∈ R n is the delayed state of the controller . Considering the sys- tem dynamics (7) and the controller (13) the closed-loop system would be as follo ws ˙ x cl ( t ) = A cl x cl ( t ) + A d , cl x cl ( t − τ ( t )) + B cl w ( t ) , z ( t ) = C cl x cl ( t ) + C d , cl x cl ( t − τ ( t )) + D cl w ( t ) , (14) where A cl = A + B 2 D k C 2 B 2 C k B k C 2 A k , A d , cl = A d + B 2 D k C 2 d B 2 C d k B k C 2 d A d k , B cl = B 1 + B 2 D k D 21 B k D 21 , C cl = C 1 + D 12 D k C 2 D 12 C k , C d , cl = C 1 d + D 12 D k C 2 d D 12 C d k , D cl = D 11 + D 12 D k D 21 , and x cl ( t ) = [ x ( t ) x k ( t ) ] T , and the dependence on the schedul- ing parameter has been dropped for clarity . Now , considering the 5 Copyright c 2019 by ASME closed-loop system (14), the following result provides sufficient conditions for the synthesis of a delayed output-feedback con- troller which guarantees closed-loop asymptotic stability and a specified lev el of performance as defined earlier in (10). Theorem 3. [23] The system (7) is asymptotically stable for parameters ρ ∈ F ν P and all delays τ ∈ T and satisfy the condi- tion || z || 2 ≤ γ || w || 2 for the closed-loop system (14), if ther e exists a continuously differ entiable matrix function e P : R s → S 2 n ++ , pa- rameter dependent matrix functions X , Y : R s → S n ++ , constant matrices e Q , e R ∈ S n ++ , parameter dependent matrices b A, b A d , b B, b C, b C d , b D k , thr ee scalars γ > 0 , and λ 2 , λ 3 such that the following LMI condition holds − 2 e V e P − λ 2 e V + A − λ 3 e V + A d ? e Ψ 22 + λ 2 ( A + A T ) e R + λ 3 A T + λ 2 A d ? ? e Ξ 22 + λ 3 ( A d + A T d ) ? ? ? ? ? ? ? ? ? B 0 e V + τ e R λ 2 B C T λ 2 e V − e P λ 3 B C T d λ 3 e V − γ I D T 0 ? − γ I 0 ? ? ( − 1 − 2 τ ) e R ≺ 0 , (15) with e V = Y I I X , A = A Y + B 2 b C A + B 2 D k C 2 b A XA + b B C 2 , A d = A d Y + B 2 b C d A d + B 2 D k C 2 d b A d XA d + b B C 2 d , B = B 1 + B 2 D k D 21 XB 1 + b B D 21 , C = C 1 Y + D 12 b C C 1 + D 12 D k C 2 , C d = C 1 d Y + D 12 b C d C 1 d + D 12 D k C 2 d , D = D 11 + D 12 D k D 21 , e Ψ 22 = ∑ s i = 1 ± ν i ∂ e P ( ρ ) ∂ ρ i + e Q − e R , e Ξ 22 = − 1 − ∑ s i = 1 ± ν i ∂ τ ∂ ρ i e Q − e R . (16) new ˙ X + XA + b B C 2 + ( ? ) ? b A T + A + B 2 D k C 2 − ˙ Y + A Y + B 2 b C + ( ? ) ( XB 1 + b B D 21 ) T ( B 1 + B 2 D k D 21 ) T C 1 + D 12 D k C 2 C 1 Y + D 12 b C ? ? ? ? − γ I ? D 11 + D 12 D k D 21 − γ I ≺ 0 , (17) X I I Y 0 , (18) Once the parameter dependent matrices X , Y , b A , b A d , b B , b C , b C d , and b D k satisfying the mentioned LMI condition (15) hav e been obtained, the delayed output-feedback controller matrices can be computed through the following steps: 1. Determine M and N from the factorization problem I − XY = NM T , (19) where the obtained M and N matrices are alw ays square and in- vertible in the case of computing full-order controllers. 2. Compute the controller matrices by re versing the transforma- tions defined by b A = XA Y + XB 2 D k C 2 Y + NB k C 2 Y + XB 2 C k M T + NA k M T , b A d = XA d Y + XB 2 D k C 2 d Y + NB k C 2 d Y + XB 2 C d k M T + NA d k M T , b B = XB 2 D k + NB k , b C = D k C 2 Y + C k M T , b C d = D k C 2 d Y + C d k M T . (20) 3. Finally , the controller matrices are computed in the following order: C d k = ( b C d − D k C 2 d Y ) M − T , C k = ( b C − D k C 2 Y ) M − T , B k = N − 1 ( b B − XB 2 D k ) , A d k = − N − 1 ( XA d Y + XB 2 D k C 2 d Y + NB k C 2 d Y + XB 2 C d k M T − b A d ) M − T , A k = − N − 1 ( X A Y + XB 2 D k C 2 Y + NB k C 2 Y + XB 2 C k M T − b A ) M − T . (21) 6 Copyright c 2019 by ASME CLOSED-LOOP SIMULA TION RESUL TS OF MAP REG- ULA TION USING LPV CONTR OL The MAP dynamic regulation problem is formulated in an LPV framework utilizing the state equations in (5) where the state-space matrices are as in (6). Moreover , the vector of the target outputs to be controlled is z = [ φ x e ξ u ] T , i.e. C 1 ( ρ ( t )) = 0 0 φ 0 0 0 , D 12 ( ρ ( t )) = [ 0 , ξ ] T . The matrices C 1 d ( ρ ( t )) and D 11 ( ρ ( t )) in (7) are zero matrices with compatible dimensions. The tracking error which is included in the state x e ( t ) and the control effort u ( t ) are being penalized by the variables φ and ξ , respecti v ely . The choice of the scalars φ and ξ determines the relativ e weighting in the optimization scheme and depends on the desired performance objecti v es. The output-feedback controller is designed to minimize the induced L 2 gain (or H ∞ norm) (10) of the closed-loop LPV system (14). The design objecti v e is to guarantee the closed-loop stability and minimize the worst case disturbance amplification over the entire range of model parameter variations. Theorem 3 is used to design an output- feedback controller which leads to an infinite-dimensional con- ve x optimization problem with an infinite number of LMIs and decision v ariables. T o ov ercome this challenge, we utilize the gridding approach introduced in [16] to con v ert the infinite- dimensional problem to a finite-dimensional conv ex optimization problem. In this regard, we choose the functional dependence as M ( ρ ( t )) = M 0 + s ∑ i = 1 ρ i ( t ) M i 1 + 1 2 s ∑ i = 1 ρ 2 i ( t ) M i 2 , where M ( ρ ( t )) represents any of the parameter -dependent matrices appearing in the LMI condition (15). Finally , gridding the scheduling param- eter space at appropriate interv als leads to a finite set of LMIs to be solved for the unknown matrices and γ . The MA TLAB R toolbox Y ALMIP is used to solve the introduced optimization problem [24]. T o e valuate the performance of the proposed LPV gain- scheduling output-feedback control design, collected animal ex- periment data is used to build a patient’ s non-linear MAP re- sponse model based on (1) where the instantaneous values of the model parameters K , T , and τ are generated as follows [17]. Sensitivity parameter, K : experiments have confirmed a re- gressiv e non-linear relationship between the v asoactive drug injection and the MAP response through which the patient’ s sensitivity decreases gradually on a constant vasoacti v e drug injection. This behavior is captured by the following non- linear relationship: a k ˙ K + K = k 0 ex p {− k 1 i ( t ) } , (22) where i ( t ) is the drug injection and a k , k 0 , and k 1 are uni- formly distributed random coef ficients based on T ab . 1 [25]. For example, a non-responsiv e patient to the injected v a- soactiv e drug will be characterized by a low k 0 and a high T ABLE 1 . Probabilistic distribution of the non-linear patient model coefficients with uniform distrib ution U Parameter Distrib ution a k U ( 500 , 600 ) k 0 U ( 0 . 1 , 1 ) k 1 U ( 0 . 002 , 0 . 007 ) b T U ( 10 − 4 , 3 × 10 − 4 ) a τ , 1 U ( 5 , 15 ) a τ , 2 U ( 5 , 15 ) b τ , 1 U ( 80 , 120 ) k 1 . Lag time, T : This parameter gradually increases with the injected drug volume and it can be modeled as: T = sat [ T min , T max ] { b T Z t 0 i ( t ) d t } , (23) where b T is a uniformly distributed random variable which shows the inclination of the increase and varies based on T ab. 1. Infusion delay , τ : Based on the observations, the delay v alue has a peak shortly after the drug injection but it decays after - ward. The following equation is used to describe the delay behavior: ( a τ , 2 ... τ + a τ , 1 ¨ τ + ˙ τ = b τ , 1 ˙ i ( t ) + i ( t ) , t ≥ t i 0 , τ = 0 , ot her wise , (24) where the saturation is imposed on the delay value, i.e. sat [ τ min , τ max ] τ and the uniformly distrib uted random variables a τ , 2 , a τ , 1 , and b τ , 1 are listed in T ab. 1. For comparison, we e v aluate the proposed controller perfor- mance against a fixed structure PI controller (see [20]). Giv en the following nominal v alues of the model parameters K = 0 . 55 , T = 150, and τ = 40, the tuned PI controller transfer function is as follows: G c ( s ) = 3 + 0 . 017 s , (25) which is obtained based on the approach proposed in [26] to meet the prescribed gain and phase mar gin constraints. In the ab- sence of disturbances and measurement noise, the tracking pro- file and the control effort are shown in Fig. 3 where the objec- tiv e is to regulate the MAP response to track the commanded 7 Copyright c 2019 by ASME FIGURE 3 . Closed-loop MAP response and control effort of the pro- posed LPV controller and the fixed structure PI controller with no dis- turbance and no measurement noise MAP with minimum ov ershoot and the settling time and zero steady-state error . According to this figure, the o vershoot of the closed-loop response remains within the admissible range and the delay-dependent parameter-varying controller provides a faster response with less settling time compared to the conv en- tional PI controller . Next, we assume that the closed-loop system is experiencing both measurement noise and output disturbances. These disturbances could be the result of medical interventions and physiological variations due to hemorrhage or other medi- cations like lactated ringers (LR). Figure 4 is a typical profile of such disturbances. Considering measurement noise with the intensity of 10 − 3 , the performance of the LPV and the PI con- trollers can be seen in Fig. 5. As expected, the proposed LPV controller outperforms the fixed structure PI controller with re- spect to the rise time and speed of the response due to its schedul- ing structure. T o conclude, we can observe that the proposed LPV gain-scheduling control methodology with adaptation for wide range of patients demonstrates outstanding closed-loop per- formance in terms of MAP reference tracking and disturbance re- jection under dif ferent scenarios and also is able to maintain the blood pressure within the allo wable range of the reference v alue with maximum ov ershoot under 1% and settling time under 200 seconds. CONCLUSION AND FUTURE WORK Automated MAP feedback control for critical patient resus- citation is addressed in the present paper . In this regard, the gov erning dynamics of the MAP response to the vasopressor drug injection is expressed as an LPV time delayed system and a delay-dependent LPV output-feedback controller is designed to guarantee the asymptotic stability and the prescribed perfor - FIGURE 4 . Profile of output disturbances FIGURE 5 . Closed-loop MAP response and control effort of pro- posed LPV controller against fix ed structure PI controller subject to dis- turbance and measurement noise mance of the closed-loop system in terms of the induced L 2 - norm specification. It is shown that the utilized method and the choice of the parameter-dependent L yapunov-Krasovskii func- tionals ha ve resulted in a direct and also less conserv ativ e design approach, that can also handle the LPV systems with fast-varying parameters and time delay . Closed-loop simulations using a non- linear simulation patient model derived from experimental data demonstrated the controller desirable rob ustness to model pa- rameters v ariations and time-delay while adjusting the set-point response under disturbances and measurement noise. Future re- search would focus on de v eloping a new efficient online estima- tion algorithm to estimate the time-varying model parameters. 8 Copyright c 2019 by ASME A CKNO WLEDGMENT Financial support from the National Science F oundation un- der grant CMMI1437532 is gratefully acknowledged. The col- laboration of the Resuscitation Research Laboratory (Dr . G. Kramer) at the University of T exas Medical Branch (UTMB), Galveston, T exas, in providing animal experiment data is grate- fully acknowledged. References [1] He, W ., Kaufman, H., and Roy , R., 1986. “Multiple model adaptiv e control procedure for blood pressure control”. IEEE T r ansactions on Biomedical Engineering, 33 (1), pp. 10–19. [2] Neves, J. F . N. P . d., Monteiro, G. A., Almeida, J. R. d., Sant’Anna, R. S., Bonin, H. B., and Macedo, C. F ., 2010. “Phenylephrine for blood pressure control in elective ce- sarean section: therapeutic versus proph ylactic doses”. Re- vista Brasileir a de Anestesiologia, 60 (4), pp. 395–398. [3] Kee, W . D. N., Khaw , K. S., and Ng, F . F ., 2005. “Pre ven- tion of hypotension during spinal anesthesia for cesarean deliv eryan effecti ve technique using combination phenyle- phrine infusion and crystalloid cohydration”. The J our - nal of the American Society of Anesthesiologists, 103 (4), pp. 744–750. [4] Kashihara, K., Kawada, T ., Uemura, K., Sugimachi, M., and Sunagawa, K., 2004. “ Adaptive predictive control of arterial blood pressure based on a neural network during acute h ypotension”. Annals of Biomedical Engineering, 32 (10), pp. 1365–1383. [5] Niculescu, S.-I., and Gu, K., 2012. Advances in time-delay systems , V ol. 38. Springer Science & Business Media. [6] Fridman, E., 2014. Introduction to time-delay systems anal- ysis and contr ol . Springer, Basel. [7] Chen, J., and Latchman, H., 1994. “ Asymptotic stability independent of delays: simple necessary and suf ficient con- ditions”. In Proceedings of American Control Conference, V ol. 1, pp. 1027–1031. [8] Loiseau, J. J., Michiels, W ., Niculescu, S.-I., and Sipahi, R., 2009. T opics in time delay systems: analysis, algorithms and contr ol , V ol. 388. Springer . [9] Sakthivel, R., Mathiyalagan, K., and Anthoni, S. M., 2012. “Robust stability and control for uncertain neutral time de- lay systems”. International Journal of Contr ol, 85 (4), pp. 373–383. [10] T asoujian, S., Salav ati, S., Franchek, M., and Grigoriadis, K., 2019. “Robust IMC-PID and parameter-v arying control strategies for automated blood pressure regulation”. In- ternational Journal of Contr ol, Automation and Systems, 17 (7), pp. 1814–1825. [11] Kharitonov , V . L., 2004. “L yapunov-Kraso vskii functionals for scalar time delay equations”. Systems & Contr ol Letters, 51 (2), pp. 133–149. [12] Jankovic, M., 2001. “Control L yapunov-Razumikhin func- tions and rob ust stabilization of time delay systems”. IEEE T ransactions on Automatic Contr ol, 46 (7), pp. 1048–1060. [13] Schulz, E., Schultalbers, M., and W erner , H., 2016. “Lin- ear parameter -varying control for air/fuel ratio in si engines with parameter dependent time delay”. In Proceedings of American Control Conference, pp. 3292–3297. [14] Dezfuli, S. S., Ebrahimi, B., Grigoriadis, K., and Franchek, M., 2016. “Internal model control for a class of uncertain time-delay systems”. In Proceedings of American Control Conference, pp. 960–966. [15] Shamma, J. S., and Athans, M., 1990. “ Analysis of gain scheduled control for nonlinear plants”. IEEE T ransactions on Automatic Contr ol, 35 (8), pp. 898–907. [16] Apkarian, P ., and Adams, R. J., 1998. “ Advanced gain- scheduling techniques for uncertain systems”. IEEE T rans- actions on Contr ol Systems T echnology , 6 (1), pp. 21–32. [17] Luspay , T ., and Grigoriadis, K., 2015. “Robust linear parameter-v arying control of blood pressure using vasoac- tiv e drugs”. International Journal of Contr ol, 88 (10), pp. 2013–2029. [18] T asoujian, S., Ebrahimi, B., Grigoriadis, K., and Franchek, M., 2016. “Parameter -v arying loop-shaping for delayed air- fuel ratio control in lean-burn SI engines”. In Proceedings of ASME Dynamic Systems and Control Conference. [19] Zope, R., Mohammadpour , J., Grigoriadis, K., and Franchek, M., 2012. “Delay-dependent H ∞ control for LPV systems with fast-v arying time delays”. In Proceed- ings of American Control Conference, pp. 775–780. [20] W assar , T ., Luspay , T ., Upendar, K. R., Moisi, M., V oigt, R. B., Marques, N. R., Khan, M. N., Grigoriadis, K. M., Franchek, M. A., and Kramer, G. C., 2014. “ Automatic control of arterial pressure for hypotensiv e patients using phenylephrine”. International Journal of Modelling and Simulation, 34 (4), pp. 187–198. [21] Isaka, S., and Sebald, A. V ., 1993. “Control strategies for arterial blood pressure regulation”. IEEE T ransactions on Biomedical Engineering, 40 (4), pp. 353–363. [22] Rao, R. R., Aufderheide, B., and Bequette, B. W ., 2003. “Experimental studies on multiple-model predicti ve control for automated regulation of hemodynamic variables”. IEEE T ransactions on Biomedical Engineering, 50 (3), pp. 277– 288. [23] Briat, C., 2015. Linear parameter-varying and time-delay systems analysis, observation, filtering & contr ol . Springer - V erlag Berlin Heidelberg. [24] Lofberg, J., 2004. “Y ALMIP: A toolbox for modeling and optimization in MA TLAB”. In IEEE International Confer- ence on Robotics and Automation, pp. 284–289. [25] Craig, C. R., and Stitzel, R. E., 2004. Modern pharma- 9 Copyright c 2019 by ASME cology with clinical applications . Lippincott W illiams & W ilkins. [26] Zhong, Q.-C., 2006. Robust contr ol of time-delay systems . Springer-V erlag, London. 10 Copyright c 2019 by ASME
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment