Robust Hierarchical MPC for Handling Long Horizon Demand Forecast Uncertainty with Application to Automotive Thermal Management
This paper presents a robust hierarchical MPC (H-MPC) for dynamic systems with slow states subject to demand forecast uncertainty. The H-MPC has two layers: (i) the scheduling MPC at the upper layer with a relatively long prediction/planning horizon and slow update rate, and (ii) the piloting MPC at the lower layer over a shorter prediction horizon with a faster update rate. The scheduling layer MPC calculates the optimal slow states, which will be tracked by the piloting MPC, while enforcing the system constraints according to a long-range and approximate prediction of the future demand/load, e.g., traction power demand for driving a vehicle. In this paper, to enhance the H-MPC robustness against the long-term demand forecast uncertainty, we propose to use the high-quality preview information enabled by the connectivity technology over the short horizon to modify the planned trajectories via a constraint tightening approach at the scheduling layer. Simulation results are presented for a simplified vehicle model to confirm the effectiveness of the proposed robust H-MPC framework in handling demand forecast uncertainty.
💡 Research Summary
This paper introduces a robust hierarchical model predictive control (H‑MPC) framework designed to cope with long‑horizon demand forecast uncertainty, with a focus on automotive thermal management applications. The authors recognize that many dynamic systems—such as vehicle and aircraft thermal subsystems—exhibit multiple time‑scale dynamics: fast actuated states and slow storage states (e.g., battery temperature). A single‑layer MPC either requires an excessively long prediction horizon, which inflates computational load, or suffers from inaccurate long‑term demand forecasts, leading to constraint violations especially for the slow states.
The proposed H‑MPC consists of two layers. The upper “scheduling” layer operates with a slower sampling period (T_s = ν·T) and a long prediction horizon (H_s). It optimizes the trajectories of the slow states using an approximate, long‑range demand preview (ˆU_s). The lower “piloting” layer runs at the original fast sampling period (T) with a short horizon (H_p). It receives a high‑quality short‑term demand preview (e.g., from V2V/V2I communications) and tracks the slow‑state reference generated by the scheduling layer while simultaneously regulating the fast dynamics.
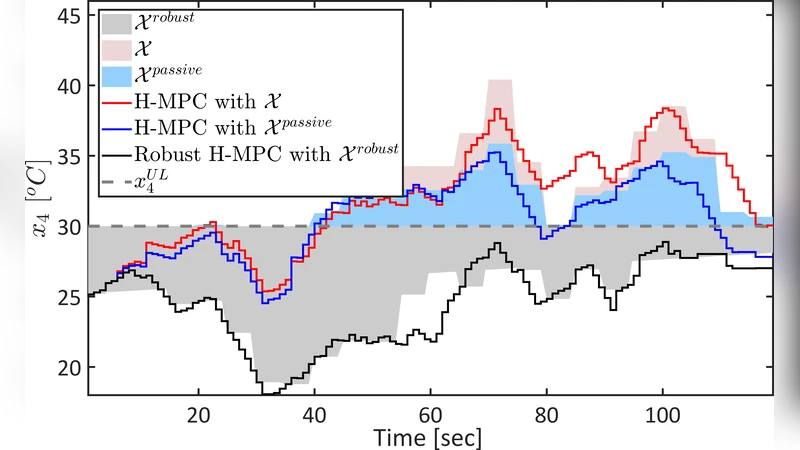
The key innovation lies in using the accurate short‑term preview available to the piloting layer to predict possible constraint violations of the slow states over its horizon. By propagating the system dynamics with the piloting‑layer optimal control inputs, the method computes predicted future states x(k+j+1|k). If any slow‑state exceeds its admissible bounds q_x, the excess (¯q_x) is quantified. This excess is subtracted from the original constraint set, yielding tightened constraint sets X_j for each future step. The intersection of these sets forms a robust constraint set X_robust, which replaces the original constraints in the scheduling‑layer MPC at the next iteration. Consequently, the scheduling layer proactively reserves margin for the slow states, mitigating the impact of long‑horizon forecast errors.
The authors contrast this proactive tightening with a passive, event‑triggered tightening that only reacts after a violation is observed. Because slow dynamics require lead time for corrective action, the proactive approach is shown to be far more effective.
Simulation studies on a simplified vehicle thermal management model (including battery temperature and coolant dynamics) demonstrate the benefits. With realistic V2V/V2I short‑term power demand forecasts, the robust H‑MPC significantly reduces the number of constraint violations compared with a conventional H‑MPC, while improving overall energy efficiency. The results also highlight that higher accuracy of the short‑term preview amplifies the robustness gains.
In summary, the paper contributes a novel robust H‑MPC scheme that leverages multi‑resolution demand forecasts: a coarse long‑range preview for planning slow‑state trajectories and a precise short‑range preview for anticipatory constraint tightening. This combination addresses the fundamental challenge of long‑horizon demand uncertainty in multi‑time‑scale systems, offering a computationally tractable and performance‑enhancing solution for automotive thermal management and potentially other domains such as HVAC, power grids, and aerospace thermal control. Future work is suggested on extending the approach to nonlinear dynamics, handling communication delays, and validating on real‑vehicle experiments.
Comments & Academic Discussion
Loading comments...
Leave a Comment