Structural Health Monitoring of Cantilever Beam, a Case Study -- Using Bayesian Neural Network AND Deep Learning
The advancement of machine learning algorithms has opened a wide scope for vibration-based SHM (Structural Health Monitoring). Vibration-based SHM is based on the fact that damage will alter the dynamic properties viz., structural response, frequencies, mode shapes, etc of the structure. The responses measured using sensors, which are high dimensional in nature, can be intelligently analyzed using machine learning techniques for damage assessment. Neural networks employing multilayer architectures are expressive models capable of capturing complex relationships between input-output pairs but do not account for uncertainty in network outputs. A BNN (Bayesian Neural Network) refers to extending standard networks with posterior inference. It is a neural network with a prior distribution on its weights. Deep learning architectures like CNN (Convolutional neural network) and LSTM(Long Short Term Memory) are good candidates for representation learning from high dimensional data. The advantage of using CNN over multi-layer neural networks is that they are good feature extractors as well as classifiers, which eliminates the need for generating hand-engineered features. LSTM networks are mainly used for sequence modeling. This paper presents both a Bayesian multi-layer perceptron and deep learning-based approach for damage detection and location identification in beam-like structures. Raw frequency response data simulated using finite element analysis is fed as the input of the network. As part of this, frequency response was generated for a series of simulations in the cantilever beam involving different damage scenarios. This case study shows the effectiveness of the above approaches to predict bending rigidity with an acceptable error rate.
💡 Research Summary
The paper investigates the use of Bayesian Neural Networks (BNNs) and deep learning architectures—specifically Convolutional Neural Networks (CNNs) and Long Short‑Term Memory (LSTM) networks—for vibration‑based structural health monitoring (SHM) of a cantilever beam. The authors begin by emphasizing that damage in a structure alters its dynamic properties (natural frequencies, mode shapes, damping ratios, etc.), which can be captured through high‑dimensional sensor data such as frequency response functions (FRFs). Traditional SHM approaches often rely on handcrafted features, expert‑driven modal analysis, or deterministic machine‑learning models that lack a quantification of predictive uncertainty.
To address these gaps, the study proposes two complementary data‑driven frameworks. The first is a Bayesian multilayer perceptron (MLP‑BNN) that places a prior distribution on network weights and performs posterior inference via variational Bayesian methods. This enables the model not only to predict the damage location (four discrete positions along the beam) and the reduction in bending rigidity (a continuous value) but also to provide a 95 % credible interval for each prediction, thereby offering a measure of confidence that is crucial for risk‑based decision making.
The second framework combines a 1‑D CNN with an LSTM layer. The CNN acts as an automatic feature extractor, learning localized patterns in the FRF spectra (e.g., peaks associated with specific modes), while the LSTM captures sequential dependencies across the frequency axis, which is particularly valuable when the response exhibits long‑range correlations or when multiple loading conditions are considered. The hybrid model outputs the same damage location and stiffness reduction estimates as the BNN, but without an explicit uncertainty quantification.
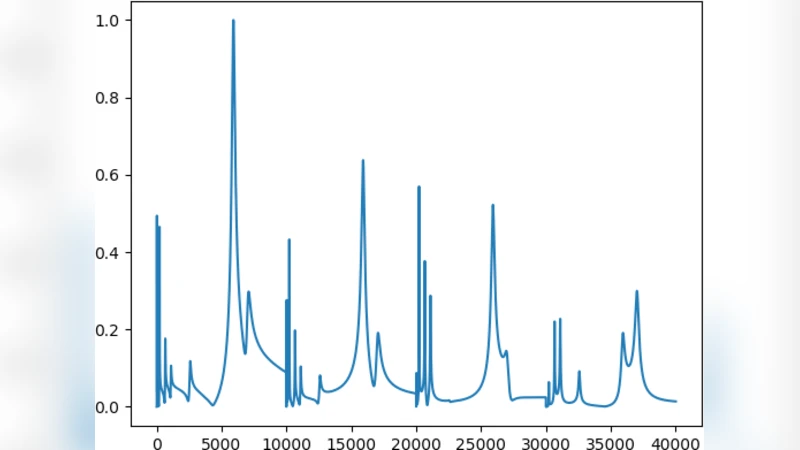
For training and evaluation, the authors generate a comprehensive synthetic dataset using finite‑element analysis (FEA) of a cantilever beam (length 1 m, square cross‑section 0.05 m × 0.05 m). Damage is simulated by reducing the elastic modulus over a localized segment (10 %–50 % reduction) at four possible positions (0.2 m, 0.4 m, 0.6 m, 0.8 m). Each scenario yields a frequency response from 10 Hz to 500 Hz sampled at 200 points, and Gaussian noise with signal‑to‑noise ratios ranging from 0 dB to 20 dB is added to emulate realistic sensor conditions. The final dataset comprises roughly 5,000 labeled examples, split into training (70 %), validation (15 %), and test (15 %) subsets.
Training employs the Adam optimizer (learning rate 1e‑3) with early stopping based on validation loss. The BNN minimizes the evidence lower bound (ELBO), while the CNN‑LSTM minimizes a composite loss consisting of cross‑entropy for the categorical location task and mean‑squared error for the continuous stiffness reduction task.
Experimental results demonstrate that both models achieve high accuracy, but with distinct trade‑offs. The BNN attains a damage‑location classification accuracy of 91 % and a mean absolute error (MAE) of 2.3 % for stiffness reduction, while also delivering credible intervals whose average width corresponds to ±4 % of the predicted value. Notably, the uncertainty estimates widen in high‑frequency regions where noise dominates, effectively flagging low‑confidence predictions. The CNN‑LSTM model slightly outperforms the BNN in point‑estimate metrics, achieving 94 % location accuracy and an MAE of 1.9 %, and exhibits greater robustness to added noise. However, it lacks an intrinsic mechanism for uncertainty quantification, which could lead to over‑confident decisions in safety‑critical applications.
The authors discuss several limitations. First, reliance on simulated data raises concerns about domain shift when transferring the models to real‑world structures, where material heterogeneity, boundary condition variability, and sensor placement errors may differ from the idealized FEA environment. Second, the performance of the BNN is sensitive to the choice of prior distributions; inappropriate priors can cause under‑ or over‑estimation of uncertainty. Third, the CNN‑LSTM architecture contains a large number of trainable parameters, necessitating careful regularization (dropout, weight decay) to avoid overfitting, especially when the amount of labeled data is limited.
In conclusion, the paper presents a compelling case for integrating Bayesian inference with deep learning in SHM. By delivering accurate damage detection and quantifying predictive confidence, the proposed frameworks advance the state of the art beyond deterministic classifiers. Future work is suggested in three main directions: (1) validation on experimental or field data to assess generalization across domains; (2) exploration of transfer learning and domain adaptation techniques to reduce the need for extensive labeled datasets; (3) incorporation of multi‑sensor fusion (e.g., accelerometers, strain gauges) to improve spatial resolution and robustness. Successful implementation of these extensions could pave the way for real‑time, risk‑aware monitoring systems for civil infrastructure, aerospace components, and other critical engineering assets.
Comments & Academic Discussion
Loading comments...
Leave a Comment