Nonlinearly Stable Real-Time Learning and Model-Free Control
This work provides a framework for nonlinear model-free control of systems with unknown input-output dynamics, but outputs that can be controlled by the inputs. This framework leads to real-time control of the system such that a feasible output trajectory can be tracked by the inputs. Unlike existing model-free or data-driven control approaches, this framework guarantees nonlinear stability. The controller and observer designs in the proposed framework are nonlinearly stable and robust to the unknown dynamics as well as unknown measurement noise. For ease of computer implementation, the framework is developed in discrete time. Nonlinear stability analyses of the discrete-time observers and controllers are carried out using discrete Lyapunov analysis. The unknown input-output dynamics is learnt in real time using a nonlinearly stable observer from prior input-output history. This observer ensures finite-time stable convergence of model estimation errors to zero if the unknown model is constant, and model estimation errors converge to a bounded neighborhood of the zero vector if the model has bounded change in discrete time. Measured outputs are filtered by a finite-time stable observer before use in feedback tracking of a desired output trajectory. Finite-time stable observer design in this framework also ensures that a nonlinear separation principle is in effect for separate controller and observer design. A model-free nonlinearly stable control scheme is then designed to ensure convergence of observed outputs to a desired output trajectory. This control scheme ensures nonlinear finite-time stable convergence of tracking errors to a manifold where the tracking errors decay asymptotically. A numerical experiment on a nonlinear second-order system demonstrates the performance of this nonlinear model-free control framework.
💡 Research Summary
The paper presents a comprehensive framework for model‑free control of nonlinear systems whose input‑output dynamics are unknown but whose outputs are controllable by the inputs. The authors develop the entire methodology in discrete time to facilitate computer implementation and to avoid the need for high‑frequency sampling. The core contributions are threefold: (1) a finite‑time stable (FTS) observer that filters measurement noise and provides accurate output estimates; (2) an ultra‑local model (ULM) estimator that learns the unknown input‑output relationship from past data in real time; and (3) a nonlinear feedback controller that uses the filtered output and the estimated ULM to track a desired output trajectory with guaranteed nonlinear stability.
The observer is designed using a Hölder‑continuous Lyapunov function. By constructing a discrete‑time Lyapunov inequality of the form V(k+1) – V(k) ≤ –γk Vα(k) with 0 < α < 1, the authors prove that the estimation error converges to zero in a finite number of steps, even in the presence of additive measurement noise. This result is novel for discrete‑time systems and provides a rigorous separation principle: the observer can be designed independently of the controller.
The ultra‑local model assumes that the system has a known relative degree ν, so that the ν‑th forward difference of the output can be expressed as an unknown smooth function $ of past outputs, inputs, and time. The estimator employs first‑ and second‑order nonlinear observers that guarantee finite‑time convergence of the model‑estimation error to zero when the true ultra‑local dynamics are constant. If the dynamics vary slowly (bounded rate of change), the error remains bounded within a known neighborhood. This robustness to model variation is essential for real‑world applications where the plant may drift or experience unmodeled disturbances.
The control law is derived from the estimated ultra‑local model and the filtered output. It drives the tracking error to a predefined manifold in finite time; once on the manifold, the error decays exponentially to zero. The controller’s design relies on discrete‑time Lyapunov analysis and uses a nonlinear gain function φ(·) together with a gain matrix K. The resulting closed‑loop system is proven to be Lyapunov stable and to achieve finite‑time convergence of the tracking error, providing a strong guarantee that is absent in most existing model‑free or data‑driven methods such as iPID, DeePC, or neural‑network‑based schemes.
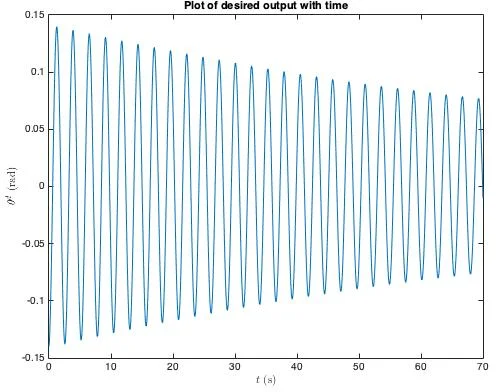
To validate the theory, the authors simulate an inverted pendulum on a cart, a classic second‑order unstable nonlinear system. The plant dynamics include unknown nonlinear friction terms, and the true model is deliberately hidden from the controller design. The simulation demonstrates that the observer quickly filters out measurement noise, the ultra‑local model estimator accurately captures the unknown dynamics, and the controller successfully tracks a sinusoidal reference trajectory. The tracking error converges to zero within a few sampling periods, confirming the finite‑time stability claims.
Overall, the paper advances the state of the art in model‑free control by providing a mathematically rigorous, discrete‑time framework that guarantees nonlinear stability, robustness to noise and model variations, and finite‑time convergence of both estimation and control errors. Future work suggested includes extending the method to higher‑order systems with automatic relative‑degree identification, hardware‑in‑the‑loop implementation, and experimental validation on platforms such as autonomous vehicles, legged robots, and medical implants.
Comments & Academic Discussion
Loading comments...
Leave a Comment