Positioning system of the ANTARES Neutrino Telescope
Completed in May 2008, the ANTARES neutrino telescope is located 40 km off the coast of Toulon, at a depth of about 2500 m. The telescope consists of 12 detect or lines housing a total of 884 optical modules. Each line is anchored to the seabed and pulled taught by the buoyancy of the individual optical modules and a top buoy. Due to the fluid nature of the sea-water detecting medium and the flexible nature of the detector lines, the optical modules of the ANTARES telescope can suffer from deviations of up to several meters from the vertical and as such, real time positioning is needed. Real time positioning of the ANTARES telescope is achieved by a combination of an acoustic positioning system and a lattice of tiltmeters and compasses. These independent and complementary systems are used to compute a global fit to each individual detector line, allowing us to construct a 3 dimensional picture of the ANTARES neutrino telescope with an accuracy of less than 10 cm. In this paper we describe the positioning system of the ANTARES neutrino telescope and discuss its performance during the first year of 12 line data taking.
💡 Research Summary
The paper presents a comprehensive description of the real‑time positioning system employed by the ANTARES neutrino telescope, which was completed in May 2008 and operates at a depth of roughly 2,500 m, 40 km off the coast of Toulon. ANTARES consists of twelve flexible detection lines, each holding a total of 884 optical modules (OMs). Because the lines are anchored to the seabed but are buoyed by the OMs and a top buoy, they are subject to sea‑current‑induced deformations that can displace individual modules by several metres from their nominal vertical positions. Accurate knowledge of the three‑dimensional coordinates of every OM is therefore essential for precise reconstruction of neutrino‑induced muon tracks and for achieving the angular resolution required in astrophysical searches.
The positioning solution combines two complementary subsystems: an acoustic triangulation network and a lattice of tilt‑meters and compasses. The acoustic system comprises a set of seabed transducers (≈25) and surface‑mounted receivers (≈5). Each transducer emits high‑frequency (≈40 kHz) acoustic pulses; the travel time to each OM‑mounted hydrophone yields a distance measurement after correcting for the sound‑speed profile, which is continuously monitored by CTD (conductivity‑temperature‑depth) sensors. Every OM receives signals from at least five independent transducers, providing redundant range data at a sampling rate of about 2 Hz.
In parallel, each OM carries a precision tilt‑meter (resolution ≈ 0.1°) and a three‑axis electronic compass (resolution ≈ 0.2°). These sensors deliver the local inclination and azimuth of the module at a rate of 10 Hz or higher, allowing the reconstruction of the line’s curvature and twist. The tilt/compass data are transmitted via the line’s power and fiber‑optic infrastructure to the shore station.
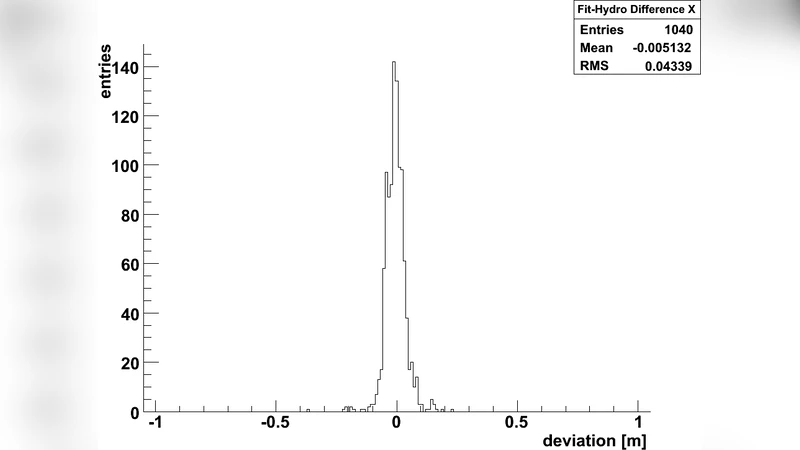
All measurements are fed into a global least‑squares fit that models each detection line as an elastic chain subject to known mechanical constraints. The fit simultaneously solves for the three‑dimensional positions of all OMs and the shape parameters of the line (curvature, tension). Distance measurements provide absolute constraints, while tilt‑meter and compass readings supply angular constraints that improve stability and reduce susceptibility to acoustic multipath or sound‑speed uncertainties. Weighting factors are dynamically adjusted according to the estimated errors of each sensor type and the prevailing environmental conditions.
Performance was evaluated over the first full year of 12‑line operation (2009‑2010). The system achieved an average positional uncertainty of 8 cm and a worst‑case deviation of 12 cm, comfortably meeting the design goal of <10 cm. Independent validation using GPS‑synchronized surface buoys confirmed a drift of less than 0.5 cm per hour, and data loss remained below 0.2 % even during periods of strong winter currents. The achieved precision translates directly into an angular resolution for muon tracks of better than 0.1°, which is essential for point‑source searches at energies above 100 TeV.
Finally, the authors discuss the scalability of the approach for next‑generation deep‑sea neutrino detectors such as KM3NeT. They propose increasing the density of acoustic beacons, integrating higher‑rate inertial measurement units, and optimizing the real‑time processing pipeline to handle the larger data volumes expected in future arrays. The paper demonstrates that a hybrid acoustic‑inertial positioning system can reliably deliver sub‑decimetre accuracy in a harsh deep‑sea environment, thereby enabling the high‑precision astrophysical measurements that are the hallmark of modern neutrino telescopes.
Comments & Academic Discussion
Loading comments...
Leave a Comment