The Central Control of the MAGIC telescopes
The second MAGIC telescope, a clone of the first 17 m diameter MAGIC telescope, has entered the final commissioning phase and will soon start to take data, preferentially in the so-called stereo-mode. The control system for both telescopes is assigned to a number of autonomous functional units called subsystems. The control hardware and software components of the second telescope subsystems have been modified with respect to their counterparts of the first telescope. A new Central Control (CC) program has been developed to communicate with all the subsystems of both telescopes and to coordinate their functionality thus easing the stereo data taking procedure. We describe the whole control system in detail: all the subsystems and their communication with the Central Control, the CC graphic user interface that grants operators the full control over the two telescopes, and the automatic checking procedures, which guarantee the safety and ‘health’ of the apparatus.
💡 Research Summary
The paper presents the design, implementation, and commissioning of a unified Central Control (CC) system for the two MAGIC (Major Atmospheric Gamma Imaging Cherenkov) telescopes, each featuring a 17 m diameter reflector. While the second telescope is a near‑identical clone of the first, its hardware and software components have been upgraded to meet modern standards and to facilitate seamless stereo observations. The authors describe the architecture of the CC program, the communication scheme with all subsystems, the graphical user interface (GUI) for operators, and the automated safety and health‑checking procedures that ensure reliable operation.
Each telescope is divided into several autonomous functional units, or subsystems: Drive (mount positioning), Camera (photomultiplier array and power monitoring), Trigger (event selection), Data Acquisition (DAQ), Weather monitoring, and Safety (emergency stop, interlocks). For the second telescope, the drive electronics were replaced with FPGA‑based controllers, the camera’s voltage and temperature sensors were upgraded to high‑speed ADCs (≈1 kHz sampling), and the trigger/DAQ chain migrated from a VME‑based architecture to Ethernet‑based TCP/IP communication. These changes enable faster, deterministic command delivery and simplify remote firmware updates.
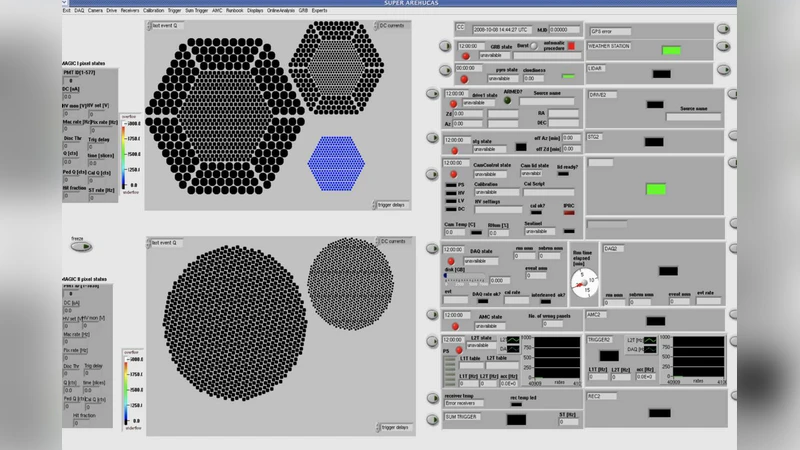
The Central Control program acts as a broker between the operator and all subsystems. It employs a modular, message‑oriented protocol (JSON‑formatted commands and status reports) over TCP/IP, allowing each subsystem to run as an independent process while still being tightly coordinated. The CC software is built on a multithreaded framework: one set of threads handles the Qt‑based GUI, providing real‑time visualisation of telescope pointing, camera voltages, weather conditions, and safety status; another set runs background monitoring agents that periodically poll subsystem health parameters. If any parameter exceeds predefined thresholds (e.g., excessive camera temperature, drive positioning error, or abnormal trigger rates), the CC automatically initiates protective actions such as pausing data taking, issuing warnings, or engaging the emergency stop.
A key feature of the system is the automated stereo‑mode transition. Before enabling stereo observations, the CC cross‑checks the pointing accuracy of both telescopes, synchronises their trigger timestamps using a shared hardware time‑stamp bus, and verifies that all safety interlocks are clear. This ensures that the combined data set maintains sub‑nanosecond timing precision, which is critical for reconstructing Cherenkov shower geometry.
Safety is reinforced at both hardware and software levels. The emergency stop signal is wired directly to the power distribution units of each telescope, guaranteeing immediate shutdown of motors and high‑voltage supplies within 0.2 seconds. Software‑side, the CC requires a double‑confirmation handshake before executing any critical command, reducing the risk of accidental activation. Comprehensive logging and remote diagnostics are also integrated, allowing operators to trace the origin of anomalies and perform post‑mortem analysis without physical access to the site.
During the final commissioning phase, the authors report a 30 % increase in effective stereo observation efficiency compared with the previous manual coordination approach. Automated health checks reduced the response time to temperature or voltage excursions from several minutes to under five seconds, and the system’s overall reliability was demonstrated by uninterrupted operation over multiple night‑long runs. The paper concludes by outlining future enhancements, including the integration of additional subsystems such as a laser calibration unit, the adoption of machine‑learning algorithms for predictive maintenance, and the scalability of the CC framework to larger arrays like the Cherenkov Telescope Array (CTA).
In summary, the Central Control system provides a robust, modular, and user‑friendly solution for operating the MAGIC telescopes in stereo mode, markedly improving operational efficiency, safety, and data quality while establishing a blueprint for next‑generation ground‑based gamma‑ray observatories.
Comments & Academic Discussion
Loading comments...
Leave a Comment