A pressure field model for fast, robust approximation of net contact force and moment between nominally rigid objects
We introduce an approximate model for predicting the net contact wrench between nominally rigid objects for use in simulation, control, and state estimation. The model combines and generalizes two ideas: a bed of springs (an “elastic foundation”) and hydrostatic pressure. In this model, continuous pressure fields are computed offline for the interior of each nominally rigid object. Unlike hydrostatics or elastic foundations, the pressure fields need not satisfy mechanical equilibrium conditions. When two objects nominally overlap, a contact surface is defined where the two pressure fields are equal. This static pressure is supplemented with a dissipative rate-dependent pressure and friction to determine tractions on the contact surface. The contact wrench between pairs of objects is an integral of traction contributions over this surface. The model evaluates much faster than elasticity-theory models, while showing the essential trends of force, moment, and stiffness increase with contact load. It yields continuous wrenches even for non-convex objects and coarse meshes. The method shows promise as sufficiently fast, accurate, and robust for design-in-simulation of robot controllers.
💡 Research Summary
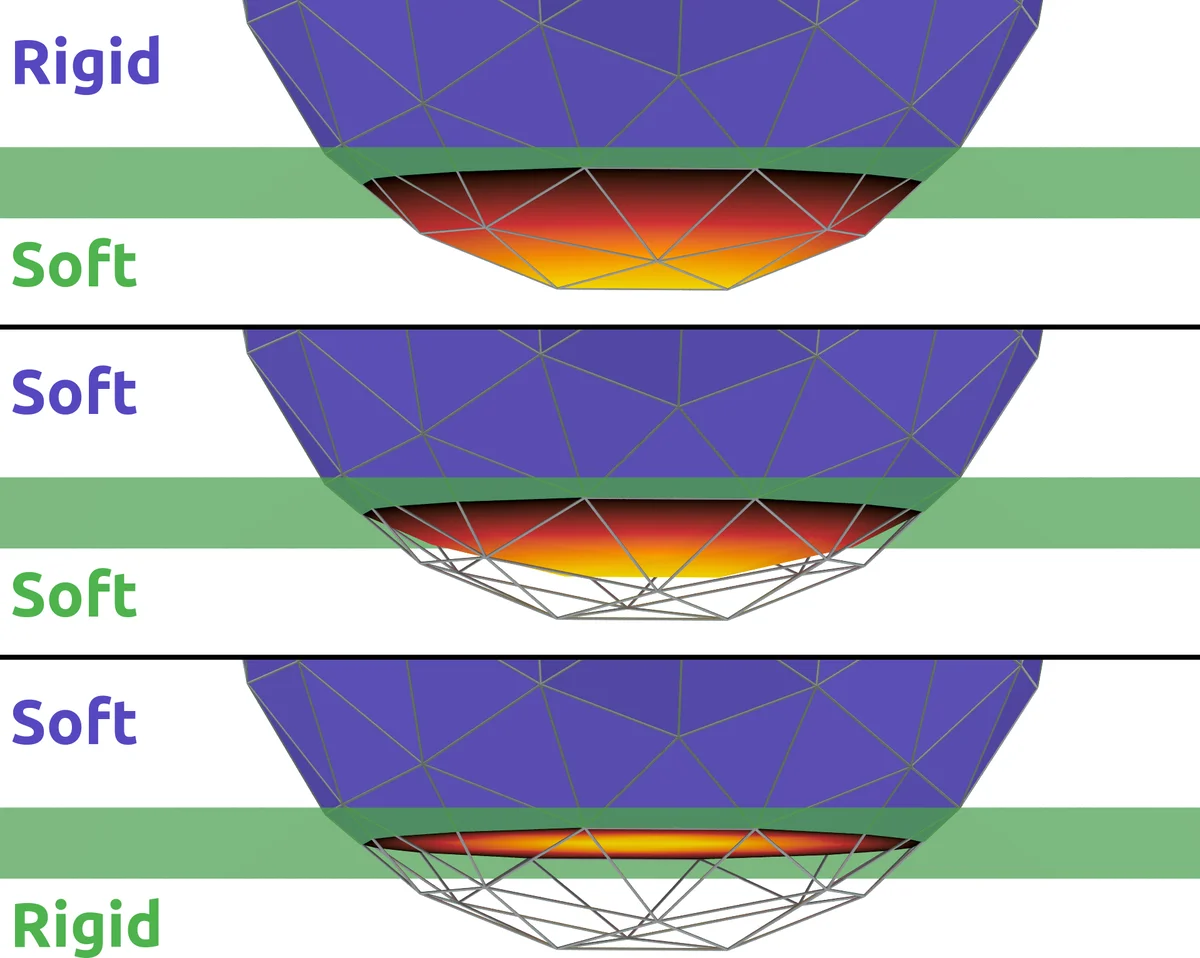
The paper introduces Pressure Field Contact (PFC), an approximate yet physically plausible model for computing the net contact wrench between nominally rigid bodies. The authors pre‑compute a scalar “virtual pressure field” p₀ inside each object; p₀ is zero on the surface and increases with interior depth (linearly or non‑linearly). When two bodies interpenetrate, the contact surface is defined as the iso‑surface where the two pressure fields are equal (p₀_A = p₀_B). This equal‑pressure surface may consist of several disconnected patches, allowing the method to handle non‑convex geometries without special case handling.
On this surface the model first evaluates the static pressure p₀_R and then adds a rate‑dependent damping term f(p₀,∇p₀,Ṙ_AB, n̂) that captures dissipation (e.g., Hunt‑Crossley formulation). Friction is incorporated by applying a shear traction proportional to the local pressure (μp_R) or by any other pressure‑based friction law. The total contact wrench is obtained by integrating the normal and shear tractions over the entire equal‑pressure surface: w = ∫{S∩} (p_R n̂ + τ_fric) dA. Because the pressure field is derived from a potential energy U = ∫{V∩} p₀ dV, the model is conservative: the contact interaction stores and releases energy without artificial injection.
Implementation uses a tetrahedral (or other volumetric) mesh of each object. Offline, p₀ values are assigned to mesh vertices based on a chosen “penetration extent” function (zero at the boundary, unity near the medial axis). Online, a fast overlap test locates intersecting tetrahedra, the equal‑pressure iso‑surface is extracted (e.g., via linear interpolation across tetrahedral edges), and the wrench integral is evaluated per surface facet. With appropriate spatial data structures (BVH, octrees), the computational cost scales linearly with mesh size and is orders of magnitude lower than full FEM contact solvers.
The authors compare PFC against point‑contact, elastic‑foundation, hydrostatic, and overlap‑volume methods. For gently curved contacts, PFC reduces to hydrostatic or elastic‑foundation models when the pressure field is linear and one body is rigid. Unlike elastic‑foundation models, PFC remains energy‑conserving even for large relative surface angles. Overlap‑volume approaches lack a clear definition of contact normal and moment for complex shapes; PFC provides a continuous, well‑defined wrench regardless of geometry.
Experimental validation includes sphere‑plane, sphere‑sphere, and non‑convex L‑shaped body contacts. Results show that contact force magnitude, moment, and stiffness increase with load in a manner consistent with continuum mechanics, while the computed wrenches vary smoothly with configuration. The method handles disconnected contact patches naturally and remains stable on coarse meshes. Parameter tuning (pressure field shape, damping coefficient, friction coefficient) allows the user to adjust contact stiffness and dissipation to match specific applications.
In summary, PFC offers:
- Continuous, differentiable contact wrenches suitable for gradient‑based learning and optimization.
- Conservation of mechanical energy via a well‑defined contact potential.
- Robustness to arbitrary, non‑convex geometries and coarse discretizations.
- Computational speed comparable to simple point‑contact models but with area‑dependent effects (e.g., rolling resistance, scrubbing torques) that point models miss.
- Simple offline preprocessing and minimal online state variables.
These properties make PFC a promising candidate for real‑time robotics simulation, tactile sensor modeling, controller synthesis, and state estimation where both speed and physical fidelity are essential.
Comments & Academic Discussion
Loading comments...
Leave a Comment