The State-of-the-Art of Coordinated Ramp Control with Mixed Traffic Conditions
Ramp metering, a traditional traffic control strategy for conventional vehicles, has been widely deployed around the world since the 1960s. On the other hand, the last decade has witnessed significant advances in connected and automated vehicle (CAV) technology and its great potential for improving safety, mobility and environmental sustainability. Therefore, a large amount of research has been conducted on cooperative ramp merging for CAVs only. However, it is expected that the phase of mixed traffic, namely the coexistence of both human-driven vehicles and CAVs, would last for a long time. Since there is little research on the system-wide ramp control with mixed traffic conditions, the paper aims to close this gap by proposing an innovative system architecture and reviewing the state-of-the-art studies on the key components of the proposed system. These components include traffic state estimation, ramp metering, driving behavior modeling, and coordination of CAVs. All reviewed literature plot an extensive landscape for the proposed system-wide coordinated ramp control with mixed traffic conditions.
💡 Research Summary
The paper addresses a critical gap in traffic‑management research: coordinated ramp control for mixed traffic environments where human‑driven vehicles (HDVs) coexist with connected and automated vehicles (CAVs). While traditional ramp metering has been deployed worldwide since the 1960s and recent studies have explored cooperative merging for CAV‑only fleets, the authors argue that a mixed‑traffic phase will likely persist for many years, demanding system‑wide solutions that can handle partial observability, heterogeneous driver behavior, and varying levels of CAV penetration.
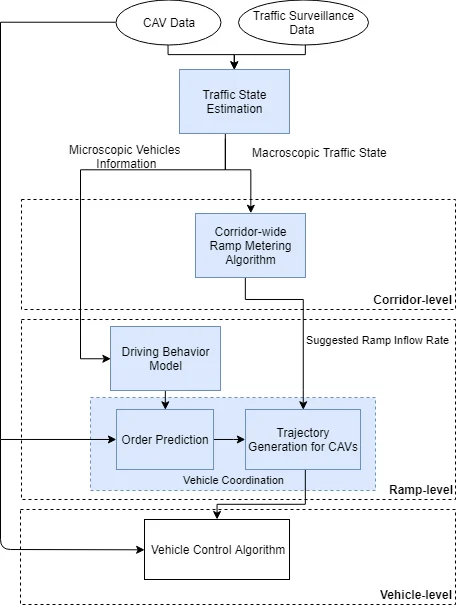
To that end, the authors propose a hierarchical, three‑level system architecture. At the lowest level, a real‑time data processor fuses stationary sensor streams (inductive loops, radar, cameras) with mobile data supplied by CAVs (position, speed, acceleration). This hybrid data feed feeds a traffic‑state‑estimation module that produces both microscopic (individual trajectories, time‑to‑arrival) and macroscopic (flow, density, speed) estimates. The authors review three families of estimation techniques: (1) model‑based approaches that embed first‑order (LWR) or higher‑order (PW, CTM) traffic flow models into Kalman‑filter‑type estimators; (2) learning‑based approaches that train statistical or machine‑learning models (e.g., k‑nearest‑neighbors, deep neural networks) on large historical datasets; and (3) streaming‑data‑driven methods that rely only on real‑time measurements and weak physical constraints such as conservation of vehicles. They highlight that CAV data dramatically improves observability, allowing accurate estimation even at low overall sensor penetration.
The second component, ramp metering, is categorized into rule‑based, control‑based, and learning‑based algorithms. Classic rule‑based schemes (ALINEA, SWARM, ZONE, fuzzy‑logic) are praised for simplicity and low computational cost but criticized for limited adaptability to nonlinear traffic dynamics. Control‑based methods introduce feedback or predictive control (LQ, MPC, stratified ramp metering) to explicitly optimize throughput, delay, or breakdown avoidance, yet they depend heavily on accurate traffic models. The most recent trend is learning‑based metering, where artificial neural networks or reinforcement‑learning agents directly map sensor inputs to metering rates, potentially capturing complex dynamics without explicit models. The authors argue that in mixed traffic, a hybrid strategy is required: traditional rule‑ or control‑based logic can be augmented with CAV‑derived high‑resolution data to refine setpoints and improve robustness.
The third pillar concerns driver‑behavior modeling for HDVs. The paper surveys car‑following and gap‑acceptance models (e.g., IDM, Gipps, lane‑changing models) and notes empirical findings such as the tendency of human drivers to maintain relatively constant speeds during merging. Accurate behavioral models are essential for predicting HDV trajectories, which in turn inform the centralized trajectory‑generation module for CAVs.
The final component focuses on CAV coordination at merging zones. The authors propose a two‑step centralized scheme: (i) predict the merging order of all approaching vehicles using estimated time‑to‑arrival (TOA) and simple heuristics (first‑come‑first‑serve or more sophisticated priority rules); (ii) compute optimal trajectories for CAVs that respect safety constraints (collision avoidance, minimum headway) while accommodating the predicted HDV motions. A lower‑level vehicle‑dynamics controller then tracks the planned trajectory. This architecture enables fine‑grained, vehicle‑specific control that can smooth acceleration/deceleration profiles, reduce fuel consumption, and lower emissions.
Throughout the manuscript, the authors critically assess the state of the art. They point out that many existing studies assume high CAV penetration, neglect the computational burden of real‑time optimization, or lack rigorous safety validation. Open challenges identified include: (a) privacy‑preserving data sharing between CAVs and infrastructure; (b) multi‑objective optimization that balances safety, mobility, and environmental metrics; (c) scalability of centralized coordination as the number of CAVs grows; and (d) the need for extensive field experiments to validate simulation results.
In conclusion, the paper provides a comprehensive roadmap for achieving system‑wide coordinated ramp control in mixed traffic. It emphasizes that success hinges on (1) robust, fused traffic‑state estimation; (2) adaptive metering algorithms that can ingest high‑resolution CAV data; (3) realistic human‑driver behavior models; and (4) hierarchical CAV coordination that blends centralized planning with vehicle‑level execution. By integrating these elements, future freeway networks can expect smoother merging, reduced congestion, lower emissions, and enhanced safety even as the transition to fully automated traffic unfolds.
Comments & Academic Discussion
Loading comments...
Leave a Comment