A Robust Roll Angle Estimation Algorithm Based on Gradient Descent
This paper presents a robust roll angle estimation algorithm, which is developed from our previously published work, where the roll angle was estimated from a dense disparity map by minimizing a global energy using golden section search algorithm. In this paper, to achieve greater computational efficiency, we utilize gradient descent to optimize the aforementioned global energy. The experimental results illustrate that the proposed roll angle estimation algorithm takes fewer iterations to achieve the same precision as the previous method.
💡 Research Summary
This paper presents a novel and computationally efficient algorithm for estimating the roll angle of a stereo camera rig using a dense disparity map. The roll angle, which occurs when the stereo baseline is not perfectly parallel to the horizontal road plane, critically impacts subsequent tasks like road segmentation based on v-disparity analysis. The core innovation lies in replacing the Golden Section Search (GSS) optimizer used in the authors’ prior work with a Gradient Descent (GD) approach to solve the same energy minimization problem, resulting in significantly faster convergence.
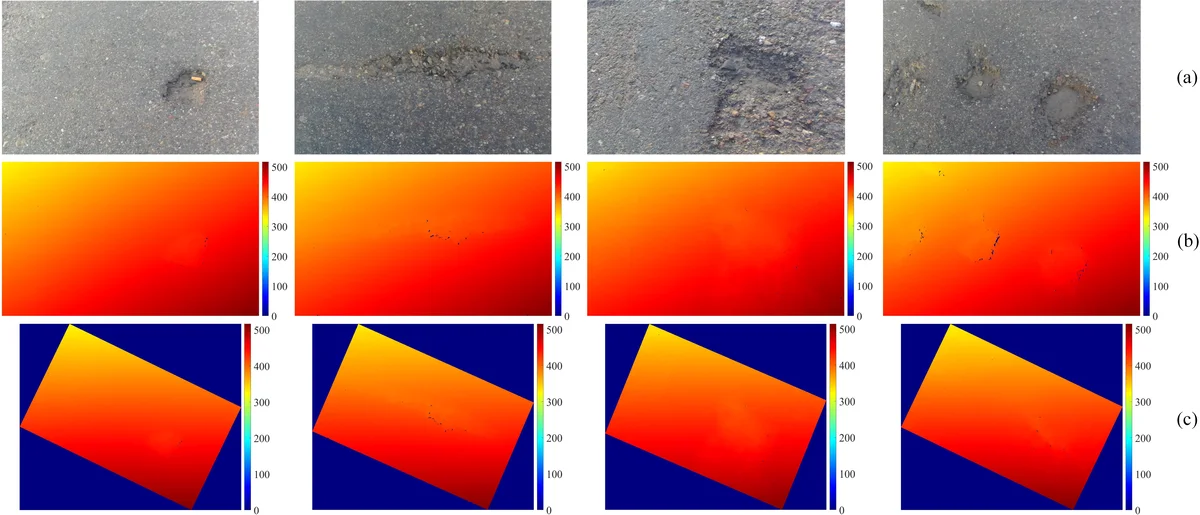
The methodology begins with a dense disparity map obtained from a stereo image pair. The algorithm formulates roll angle estimation as an optimization problem. For a candidate roll angle θ, the coordinates of the disparity map are rotated. The projected road disparities in this rotated space are modeled by a parabola. The optimal parameters for this parabola are found via least squares, and the residual error defines a global energy function E_min(θ). The true roll angle corresponds to the θ that minimizes this function.
Instead of the derivative-free GSS, which only evaluates the energy value, the proposed algorithm employs GD. It iteratively updates the angle estimate using the gradient of the energy function (∇E_min). A key enhancement is the use of backtracking line search to dynamically adapt the learning rate (λ) at each iteration, preventing oscillation or slow convergence associated with a fixed rate. This adaptive mechanism ensures robust and stable optimization.
Comprehensive experiments demonstrate the superiority of the GD-based method. In terms of convergence speed, GD requires only 3-4 iterations to achieve various precision thresholds (δθ), whereas GSS needs 16 to 30 iterations, with the count increasing as δθ becomes stricter. Consequently, the runtime of the proposed algorithm is approximately 4 to 6 times faster than the GSS-based method across all tested precision levels. Quantitative evaluation on a synthesized dataset (EISATS) with known ground truth shows that GD achieves equal or better accuracy (lower average angular error Δθ) compared to GSS. Qualitative results on real-world road scene datasets visually confirm the algorithm’s effectiveness, showing that disparity map rows become properly aligned after correction with the estimated roll angle.
In conclusion, this work successfully addresses the computational bottleneck in geometric calibration for stereo vision. By leveraging gradient information and an adaptive learning rate, the proposed Gradient Descent algorithm provides a robust, accurate, and highly efficient solution for roll angle estimation, enhancing the practicality of real-time vision systems for autonomous driving. The authors suggest exploring unsupervised learning-based neural networks for this task as future work.
Comments & Academic Discussion
Loading comments...
Leave a Comment