Smartphone app with usage of AR technologies - SolAR System
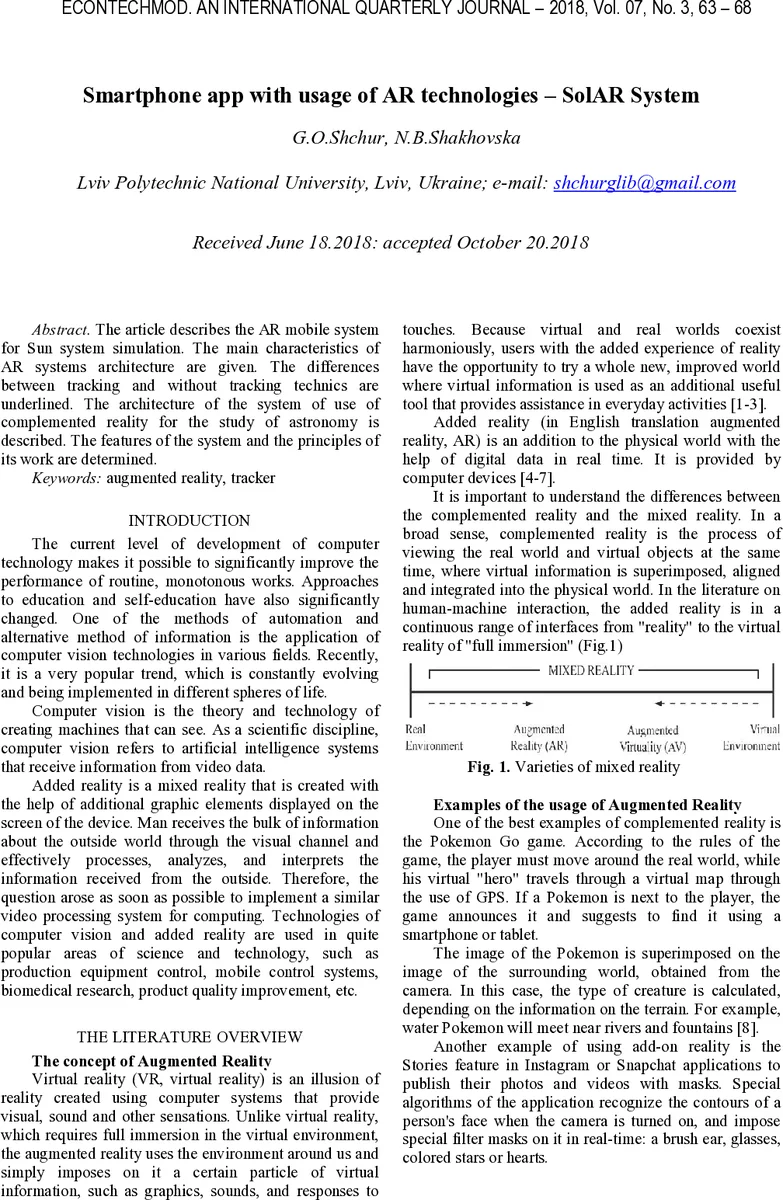
The article describes the AR mobile system for Sun system simulation. The main characteristics of AR systems architecture are given. The differences between tracking and without tracking technics are underlined. The architecture of the system of use of complemented reality for the study of astronomy is described. The features of the system and the principles of its work are determined.
💡 Research Summary
The paper presents the design and implementation of a mobile augmented reality (AR) application that simulates the Solar System, titled “SolAR System.” It begins by noting the rapid advancement of computer vision and AR technologies, which have begun to permeate many sectors, especially education, where they can make abstract astronomical concepts tangible. A literature review distinguishes AR from virtual reality (VR) and categorises AR techniques into four groups: marker‑based (image recognition), non‑marker (GPS/ inertial), projection‑based, and Visual‑Inertial Odometry (VIO). The authors discuss the strengths and weaknesses of each, highlighting VIO’s ability to create a live 3‑D map of the environment but also noting its current reliance on large‑scale platforms such as Google and Apple.
The authors then outline the problem space for mobile AR: while modern smartphones are equipped with high‑resolution cameras and a suite of sensors (accelerometer, gyroscope, magnetometer, GPS), their processing power and battery life remain limited for heavy‑weight AR workloads. Consequently, many applications adopt a client‑server model, off‑loading intensive calculations to a remote server. However, this introduces latency and bandwidth constraints that are unacceptable for real‑time tracking. To balance these issues, the authors propose a hybrid architecture that performs low‑latency sensor fusion locally while delegating heavier tasks (e.g., model generation, annotation) to a cloud service.
For tracking, the system combines GPS/inertial data for coarse positioning with a marker‑based optical tracker for fine 6‑DoF pose estimation. Markers are QR‑code‑style images placed in the physical environment; when detected by the camera, the Qualcomm Vuforia SDK extracts a transformation matrix that yields the device’s position and orientation relative to the marker. Although VIO is mentioned as a promising future direction, the current implementation relies on the more mature marker approach to keep development complexity manageable.
Visualization is built on the Unity engine, chosen for its mobile‑optimised rendering pipeline and extensive C# scripting support. 3‑D planetary models are created with the MaxSTARP plugin, packaged as Unity AssetBundles, and loaded dynamically on the device. The authors describe a structured storage scheme for models and their associated metadata (Figures 2 and 3), enabling efficient retrieval and rendering.
User interaction is realised through multi‑touch gestures. A single‑finger drag moves the selected object within the X‑Z plane, while a two‑finger pinch/rotate gesture rotates the object about the Y‑axis. The interaction pipeline uses ray‑casting: a touch point is projected into a virtual ray using Unity’s camera parameters; intersection tests determine which virtual object is selected. An algorithmic flowchart (Figure 5) details how the system distinguishes between move and rotate modes, handles multiple simultaneous touches, and updates object transformation matrices in real time.
The system architecture separates administrative functions from end‑user functionality. Administrators access a web portal to upload images and associated metadata for new “exhibits” (e.g., a shopping mall layout). The server processes these inputs, extracts spatial and visual features using the AForge.NET framework (which provides image processing, computer‑vision, and neural‑network modules), and generates annotation data. Android client applications retrieve this data via RESTful JSON APIs, overlay the annotations onto the live camera feed, and render the 3‑D Solar System objects in situ.
In the discussion, the authors acknowledge that reliance on visual markers limits scalability in uncontrolled outdoor environments and propose future migration to VIO‑based marker‑less tracking. They also stress the importance of balancing tracking accuracy against computational load, and suggest that continued improvements in mobile processors will eventually enable fully local, high‑fidelity AR experiences without server dependence.
Overall, the paper delivers a practical, end‑to‑end AR solution for educational astronomy, demonstrating how existing commercial toolkits (Vuforia, Unity, AForge.NET) can be integrated to produce an interactive Solar System simulation on commodity smartphones. The work serves as a reference point for developers seeking to build similar AR educational applications while highlighting the technical trade‑offs inherent in current mobile AR implementations.
Comments & Academic Discussion
Loading comments...
Leave a Comment