Robustness: a New Form of Heredity Motivated by Dynamic Networks
We investigate a special case of hereditary property in graphs, referred to as {\em robustness}. A property (or structure) is called robust in a graph $G$ if it is inherited by all the connected spanning subgraphs of $G$. We motivate this definition using two different settings of dynamic networks. The first corresponds to networks of low dynamicity, where some links may be permanently removed so long as the network remains connected. The second corresponds to highly-dynamic networks, where communication links appear and disappear arbitrarily often, subject only to the requirement that the entities are temporally connected in a recurrent fashion ({\it i.e.} they can always reach each other through temporal paths). Each context induces a different interpretation of the notion of robustness. We start by motivating the definition and discussing the two interpretations, after what we consider the notion independently from its interpretation, taking as our focus the robustness of {\em maximal independent sets} (MIS). A graph may or may not admit a robust MIS. We characterize the set of graphs \forallMIS in which {\em all} MISs are robust. Then, we turn our attention to the graphs that {\em admit} a robust MIS (\existsMIS). This class has a more complex structure; we give a partial characterization in terms of elementary graph properties, then a complete characterization by means of a (polynomial time) decision algorithm that accepts if and only if a robust MIS exists. This algorithm can be adapted to construct such a solution if one exists.
💡 Research Summary
The paper introduces a novel hereditary graph property called robustness. A property P is said to be robust in a graph G if it holds in every connected spanning subgraph of G, i.e., after any set of edge deletions that do not disconnect the graph. This notion is motivated by two dynamic‑network scenarios: (1) low‑dynamic networks where permanent link failures may occur as long as the network stays connected, and (2) highly‑dynamic networks where links appear and disappear arbitrarily but the system guarantees recurrent temporal connectivity (class TCR). In the latter case, robustness means that a property must hold for any unknown subset of edges that persists over time.
The authors focus on maximal independent sets (MIS). Since independence is preserved under edge removal, a robust MIS (RMIS) is simply an MIS that remains maximal in every connected spanning subgraph. Two classes of graphs are defined:
- RMI S ∀ – graphs in which all MISs are robust.
- RMI S ∃ – graphs that admit at least one robust MIS.
Characterization of RMI S ∀
The paper proves that a graph belongs to RMI S ∀ iff it is either a complete bipartite graph or a sputnik graph.
- In a complete bipartite graph K_{a,b}, the two partite sets are the only maximal independent sets. Any connected spanning subgraph must still contain at least one edge from each vertex of the opposite part, so maximality is preserved.
- A sputnik graph is defined as a graph where every vertex that lies on a cycle has at least one pendant (degree‑1) neighbor, called an antenna. Removing any cycle edge does not affect the antennas, guaranteeing that at least one neighbor of each cycle vertex remains in the MIS, thus preserving maximality.
Conversely, if a graph is not a sputnik and all its MISs are robust, the authors show through a careful analysis of articulation points and neighbor neighborhoods that the graph must be complete bipartite. Hence RMI S ∀ = (complete bipartite) ∪ (sputnik).
Existence of a Robust MIS (RMI S ∃)
The existence problem is more intricate. The authors first establish that bipartiteness is a sufficient condition: picking one partite side yields a robust MIS because any connected spanning subgraph still connects every vertex of the opposite side to the MIS.
For biconnected graphs (2‑vertex‑connected), bipartiteness is also necessary. If a biconnected graph is non‑bipartite, any MIS would either contain adjacent vertices (violating independence) or omit two adjacent vertices. In the latter case, one can delete all edges incident to one of those vertices except the edge between them without disconnecting the graph, producing a non‑maximal set—contradicting robustness. This leads to the definition of a weak vertex (a vertex not in the MIS that has a non‑MIS neighbor and whose incident edges can be largely removed while preserving connectivity).
Beyond biconnected graphs, the authors present a polynomial‑time decision algorithm for RMI S ∃. The algorithm proceeds as follows:
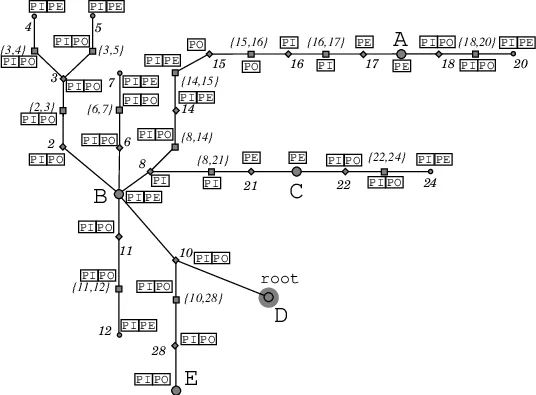
- Decompose the input graph into its block‑cut structure, forming an ABC‑tree where nodes represent either biconnected components or articulation points.
- Propagate constraints along the tree. For each articulation point, the algorithm records whether it must belong to the MIS, must be excluded, or is free, based on the requirements of adjacent components.
- Solve each biconnected component independently by reducing its internal MIS feasibility to a 2‑SAT instance. Variables encode the inclusion of articulation vertices; clauses enforce independence and maximality within the component.
- Combine the solutions using the tree constraints. If a consistent assignment exists, the graph admits a robust MIS; otherwise it does not.
The algorithm runs in O(n + m) time (linear in the size of the graph) and can be easily turned into a constructive procedure that actually outputs a robust MIS when one exists.
Temporal Interpretation
In the highly‑dynamic network model, the guarantee of recurrent temporal connectivity implies that some unknown set of edges appears infinitely often. Robustness, therefore, captures the requirement that a solution must be valid regardless of which edges constitute this recurrent set. The paper discusses how the static robustness framework maps to this temporal setting, emphasizing its relevance for designing fault‑tolerant protocols in volatile communication environments.
Contributions and Outlook
- Definition of robustness as a hereditary property constrained to connected spanning subgraphs.
- Complete characterization of graphs where all MISs are robust (complete bipartite ∪ sputnik).
- Proof that bipartiteness is necessary and sufficient for robust MIS existence in biconnected graphs.
- A linear‑time decision and construction algorithm for the general existence problem, based on an ABC‑tree decomposition and 2‑SAT reduction.
- Discussion of the temporal meaning of robustness and its applicability to dynamic networks.
Open questions include finding a more elementary graph‑theoretic description of RMI S ∃, extending the framework to other combinatorial structures (e.g., dominating sets, matchings), and exploring robustness under additional dynamic constraints such as bounded edge‑failure rates or probabilistic link models. The work opens a new avenue for studying graph properties that must survive arbitrary, connectivity‑preserving edge deletions, with clear implications for resilient network design.
Comments & Academic Discussion
Loading comments...
Leave a Comment