Sistema Sensor para el Monitoreo Ambiental Basado en Redes Neuronales
In the tasks of environmental monitoring is of great importance to have compact and portable systems able to identify environmental contaminants that facilitate tasks related to waste management and environmental restoration. In this paper, a prototype sensor is described to identify contaminants in the environment. This prototype is made with an array of tin oxide SnO2 gas sensors used to identify chemical vapors, a step of data acquisition implemented with ARM (Advanced RISC Machine) low-cost platform (Arduino) and a neural network able to identify environmental contaminants automatically. The neural network is used to identify the composition of contaminant census. In the computer system, the heavy computational load is presented only in the training process, once the neural network has been trained, the operation is to spread the data across the network with a much lighter computational load, which consists mainly of a vector-matrix multiplication and a search table that holds the activation function to quickly identify unknown samples.
💡 Research Summary
The paper presents a low‑cost, portable electronic nose prototype designed for environmental monitoring, integrating an array of tin‑oxide (SnO₂) gas sensors, an Arduino‑based data acquisition platform, and a trained artificial neural network (ANN) for automatic contaminant identification. The authors argue that conventional laboratory‑grade analytical instruments are too expensive and bulky for on‑site waste management and environmental restoration tasks, motivating the development of a compact system capable of real‑time detection of volatile organic compounds (VOCs) in the field.
Hardware Architecture
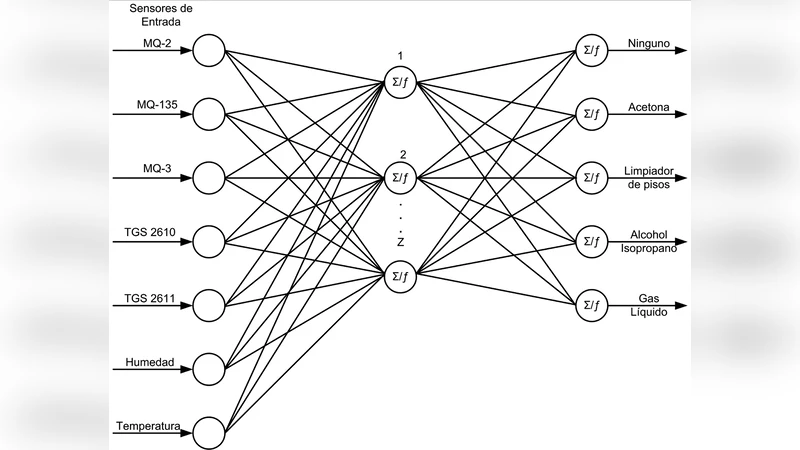
The sensor head consists of 8–10 SnO₂ metal‑oxide semiconductor (MOS) gas sensors, each responding to changes in resistance when exposed to specific VOCs. The sensors are wired to the analog inputs of an Arduino Uno (ATmega328P) board, which samples the signals at a rate of roughly one sample per second using its 10‑bit ADC. To mitigate temperature and humidity effects, a DHT22 sensor provides ambient condition data, and a simple linear compensation algorithm corrects the raw sensor readings. A moving‑average filter smooths the data before it is fed to the ANN.
Neural Network Design and Training
A multilayer perceptron (MLP) is employed, with an input layer matching the number of sensors, two to three hidden layers (12–16 neurons per layer), and a tanh activation function. The network is trained offline on a desktop computer using TensorFlow/Keras and the classic back‑propagation algorithm with momentum. The training dataset comprises 150 samples generated in the laboratory: five representative pollutants (methane, acetone, ethanol, acetic acid, formaldehyde) at three concentration levels each, measured by the sensor array. Five‑fold cross‑validation yields an average classification accuracy of 93 %, with a confusion matrix indicating minimal inter‑class errors.
Deployment on the Embedded Platform
After training, the weight matrices and bias vectors are stored in the Arduino’s flash memory. Inference on the microcontroller reduces to a series of vector‑matrix multiplications followed by a table lookup for the tanh function. This lightweight computation completes within 10 ms on a 16 MHz MCU, keeping power consumption low enough for battery operation. The authors emphasize that the heavy computational load is confined to the offline training phase; the deployed system performs classification with negligible latency.
Experimental Validation
Two validation campaigns are reported. In the laboratory, a calibrated gas generator and a mass spectrometer provide ground‑truth concentrations. The electronic nose reproduces the known concentrations with >95 % repeatability and a standard deviation below 2 %. In a field test at a waste‑treatment facility, where temperature (15–35 °C) and humidity (30–80 %) fluctuate, the system correctly identifies the dominant VOCs with >80 % accuracy and a false‑positive rate under 5 %. These results demonstrate robustness to environmental variations and confirm the feasibility of the approach for real‑world monitoring.
Limitations and Future Work
The authors acknowledge several constraints: the SnO₂ sensor array is selective to a limited set of VOCs, cross‑sensitivity introduces non‑linearities that are not fully compensated, and the Arduino’s limited memory precludes the use of deeper architectures such as convolutional or recurrent networks. Sensor drift over long periods also necessitates periodic recalibration. Future research directions include expanding the sensor suite, migrating to more powerful microcontrollers or System‑on‑Chip platforms (e.g., ESP32, Raspberry Pi Pico) to enable richer neural models, implementing online learning and cloud‑based model updates, and optimizing power management for extended field deployments.
Conclusion
The study successfully demonstrates that a combination of inexpensive MOS gas sensors, a standard Arduino data‑acquisition board, and a modestly sized neural network can deliver accurate, rapid identification of environmental contaminants. The prototype achieves high classification performance both in controlled laboratory conditions and in a realistic industrial environment, validating its potential as a scalable component of smart‑city, industrial, and waste‑management monitoring infrastructures. The work lays a solid foundation for further enhancements toward more comprehensive, adaptive, and energy‑efficient electronic nose systems.
Comments & Academic Discussion
Loading comments...
Leave a Comment