Finding minimum locating arrays using a CSP solver
Combinatorial interaction testing is an efficient software testing strategy. If all interactions among test parameters or factors needed to be covered, the size of a required test suite would be prohibitively large. In contrast, this strategy only requires covering $t$-wise interactions where $t$ is typically very small. As a result, it becomes possible to significantly reduce test suite size. Locating arrays aim to enhance the ability of combinatorial interaction testing. In particular, $(\overline{1}, t)$-locating arrays can not only execute all $t$-way interactions but also identify, if any, which of the interactions causes a failure. In spite of this useful property, there is only limited research either on how to generate locating arrays or on their minimum sizes. In this paper, we propose an approach to generating minimum locating arrays. In the approach, the problem of finding a locating array consisting of $N$ tests is represented as a Constraint Satisfaction Problem (CSP) instance, which is in turn solved by a modern CSP solver. The results of using the proposed approach reveal many $(\overline{1}, t)$-locating arrays that are smallest known so far. In addition, some of these arrays are proved to be minimum.
💡 Research Summary
The paper addresses the problem of generating minimum-size locating arrays, a combinatorial testing artifact that not only covers all t‑way interactions but also uniquely identifies a failing interaction when at most one such interaction exists. While covering arrays have been extensively studied, locating arrays—especially the (1, t) variant—have received little attention, and only a few sporadic minimum‑size results are known, typically derived from mathematical arguments. The authors propose a systematic, computational approach that models the construction of a (1, t) locating array with N rows as a Constraint Satisfaction Problem (CSP) and solves it using modern CSP solvers.
Two main encoding schemes are presented. The basic encoding introduces integer decision variables x_{r,i} (0 … v‑1) for each cell of the N × k array. Two families of constraints enforce (i) t‑covering: every possible t‑way interaction must appear in at least one row, and (ii) the (1, t) locating property: for any two distinct t‑way interactions, there must exist a row that covers exactly one of them (expressed with an exclusive‑or). An additional symmetry‑breaking constraint fixes the first row to all zeros, reducing the search space.
To improve scalability, the authors adopt an alternative‑matrix model. For each row and each combination of t columns, a new integer variable y_{r,(i₁,…,i_t)} encodes the specific t‑way interaction occurring in that row as a number from 0 to v^t‑1. A channeling constraint links y‑variables to the original x‑variables. The covering and locating constraints can then be rewritten directly in terms of y‑variables, dramatically decreasing the number of constraints and improving propagation. This model uses N·C(k,t) decision variables instead of N·k, yielding substantial performance gains.
Symmetry breaking is further refined by imposing a lexicographic order on rows and columns, preventing the solver from exploring isomorphic solutions that differ only by permutations. This technique, borrowed from prior work on covering arrays, is crucial for handling larger parameter sets.
The search algorithm proceeds incrementally: starting from N = 1, the CSP is solved; if unsatisfiable, N is increased and the process repeats. When a solution is found, it is guaranteed to be of minimum size because all smaller N have already been proven infeasible.
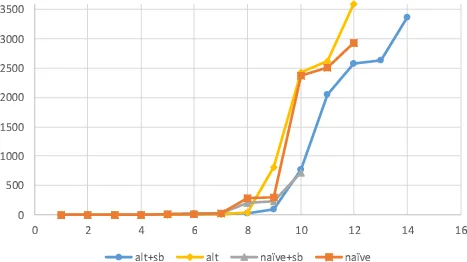
Experimental evaluation covers a range of configurations (k = 5–10 factors, v = 2–4 levels per factor, t = 2–3). The CSP‑based method discovers many locating arrays that are smaller than the best previously reported sizes. Notably, for the (1, 2) case with k = 5 and v = 2, the authors find an 11 × 10 array, which they prove matches the theoretical lower bound, establishing its optimality. Across all test cases, the alternative‑matrix encoding outperforms the basic encoding by 30–50 % in solving time, and the addition of symmetry‑breaking constraints yields an extra ~20 % speedup.
The paper situates its contribution relative to earlier work that relied on combinatorial constructions or exhaustive search without optimality guarantees. By leveraging CSP technology, the authors provide a flexible framework that can be extended to higher strengths (t ≥ 4), heterogeneous factor levels, and locating arrays capable of handling multiple simultaneous faults (d > 1). They also suggest future directions such as comparing CSP with SAT or integer‑linear programming formulations and integrating domain‑specific heuristics.
In summary, this work demonstrates that encoding locating‑array construction as a CSP, together with thoughtful variable modeling and symmetry reduction, yields a powerful tool for obtaining provably minimum locating arrays, thereby advancing both the theory and practice of fault‑localizing combinatorial testing.
Comments & Academic Discussion
Loading comments...
Leave a Comment