Utilizing Bluetooth Low Energy to recognize proximity, touch and humans
Interacting with humans is one of the main challenges for mobile robots in a human inhabited environment. To enable adaptive behavior, a robot needs to recognize touch gestures and/or the proximity to interacting individuals. Moreover, a robot interacting with two or more humans usually needs to distinguish between them. However, this remains both a configuration and cost intensive task. In this paper we utilize inexpensive Bluetooth Low Energy (BLE) devices and propose an easy and configurable technique to enhance the robot’s capabilities to interact with surrounding people. In a noisy laboratory setting, a mobile spherical robot is utilized in three proof-of-concept experiments of the proposed system architecture. Firstly, we enhance the robot with proximity information about the individuals in the surrounding environment. Secondly, we exploit BLE to utilize it as a touch sensor. And lastly, we use BLE to distinguish between interacting individuals. Results show that observing the raw received signal strength (RSS) between BLE devices already enhances the robot’s interaction capabilities and that the provided infrastructure can be facilitated to enable adaptive behavior in the future. We show one and the same sensor system can be used to detect different types of information relevant in human-robot interaction (HRI) experiments.
💡 Research Summary
The paper presents a low‑cost, easily deployable solution for three fundamental human‑robot interaction (HRI) tasks—detecting proximity, sensing touch, and distinguishing multiple users—by exploiting Bluetooth Low Energy (BLE) devices. Traditional vision‑based or external tracking systems require controlled environments, extensive calibration, and can distract especially vulnerable users such as children with autism. BLE, introduced with Bluetooth 4.0, offers sub‑10 ms scanning, minimal power consumption, and small, coin‑cell‑powered beacons that can be unobtrusively worn.
The authors built a system around a spherical, rotating robot called QueBall, which already possesses two degrees of freedom, an accelerometer, and four capacitive touch sensors. Because the robot’s firmware is closed, a separate BLE central module (Bluegiga BLED112) was attached to continuously scan for advertising packets from peripheral beacons. The peripheral devices are inexpensive Gimbal Series 10 beacons configured with the iBeacon protocol; each beacon carries a unique 20‑byte payload identifying the wearer and the mounting location (e.g., wrist or foot). Two transmission power settings were used (0 dBm and –23 dBm) to explore signal‑strength variability.
Three proof‑of‑concept experiments were conducted in a noisy laboratory with multiple Wi‑Fi sources.
- Proximity experiment: A beacon was moved away from the robot at ~5 cm s⁻¹ while video tracking (Kinovea) recorded the true distance. RSS values showed a clear monotonic decay; empirically, RSS > –70 dBm corresponded to distances < 50 cm, and RSS > –60 dBm to < 10 cm. Occlusions caused occasional spikes, indicating that raw RSS alone cannot yield precise distance but can reliably indicate “close” versus “far” states. A simple state machine used a –70 dBm threshold to declare a person present in the room and –60 dBm to flag immediate proximity.
- Touch experiment: The same beacons were used as touch sensors. When a beacon physically contacted the robot’s surface or was blocked by a hand, the RSS abruptly dropped or vanished, providing a clear signature of touch. This method complemented the robot’s built‑in capacitive sensors, allowing detection of contact even on parts of the robot not covered by the original sensors.
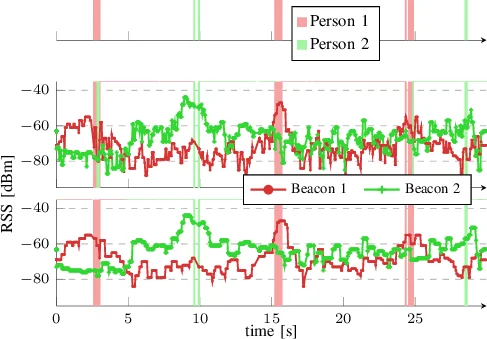
- Multi‑user discrimination experiment: Two participants each wore a beacon. The central module received simultaneous RSS streams; the robot selected the strongest signal as the current interaction partner. Despite strong Wi‑Fi interference, a signal‑strength gap of ≥ 5 dB enabled reliable user identification, demonstrating that BLE can support multi‑person scenarios without additional hardware.
The study concludes that BLE RSS, despite its susceptibility to multipath fading and body occlusion, is sufficient for coarse proximity estimation, touch detection, and user differentiation on a generic robot platform. Limitations include the need for environment‑specific calibration of RSS thresholds and the lack of precise ranging. Future work is suggested to incorporate filtering techniques (e.g., Kalman filters), multi‑antenna diversity, or machine‑learning classifiers to improve robustness, and to test the approach in real‑world settings such as classrooms or therapy rooms. Overall, the paper validates BLE as a versatile, inexpensive sensor modality that can extend HRI capabilities without imposing visual or infrastructural constraints.
Comments & Academic Discussion
Loading comments...
Leave a Comment